伺服电机转子与编码器位置对准校正解读.docx
《伺服电机转子与编码器位置对准校正解读.docx》由会员分享,可在线阅读,更多相关《伺服电机转子与编码器位置对准校正解读.docx(15页珍藏版)》请在冰豆网上搜索。
伺服电机转子与编码器位置对准校正解读
论坛中总是有人问及伺服电机编码器相位与转子磁极相位零点如何对齐的问题,这样的问题论坛中多有回答,本人也曾在多个帖子有所回复,鉴于本人的回复较为零散,早就想整理集中一下,只是一直未能如愿,今借十一长假之际,将自己对这一问题的经验和体会整理汇总一下,以供大家参考,或者有个全面的了解。
永磁交流伺服电机的编码器相位为何要与转子磁极相位对齐
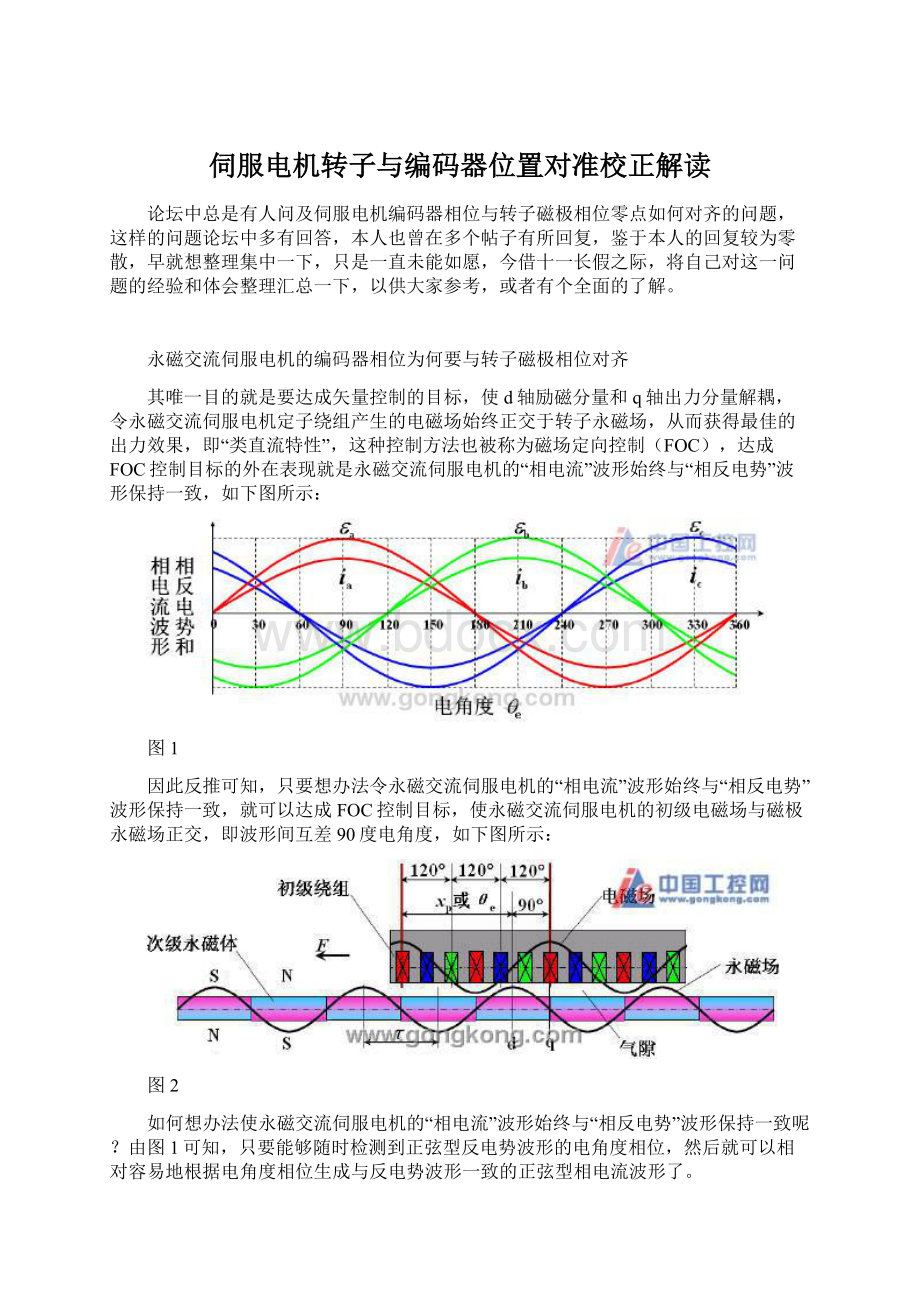
其唯一目的就是要达成矢量控制的目标,使d轴励磁分量和q轴出力分量解耦,令永磁交流伺服电机定子绕组产生的电磁场始终正交于转子永磁场,从而获得最佳的出力效果,即“类直流特性”,这种控制方法也被称为磁场定向控制(FOC),达成FOC控制目标的外在表现就是永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,如下图所示:
图1
因此反推可知,只要想办法令永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致,就可以达成FOC控制目标,使永磁交流伺服电机的初级电磁场与磁极永磁场正交,即波形间互差90度电角度,如下图所示:
图2
如何想办法使永磁交流伺服电机的“相电流”波形始终与“相反电势”波形保持一致呢?
由图1可知,只要能够随时检测到正弦型反电势波形的电角度相位,然后就可以相对容易地根据电角度相位生成与反电势波形一致的正弦型相电流波形了。
在此需要明示的是,永磁交流伺服电机的所谓电角度就是a相(U相)相反电势波形的正弦(Sin)相位,因此相位对齐就可以转化为编码器相位与反电势波形相位的对齐关系;另一方面,电角度也是转子坐标系的d轴(直轴)与定子坐标系的a轴(U轴)或α轴之间的夹角,这一点有助于图形化分析。
在实际操作中,欧美厂商习惯于采用给电机的绕组通以小于额定电流的直流电流使电机转子定向的方法来对齐编码器和转子磁极的相位。
当电机的绕组通入小于额定电流的直流电流时,在无外力条件下,初级电磁场与磁极永磁场相互作用,会相互吸引并定位至互差0度相位的平衡位置上,如下图所示:
图3
对比上面的图3和图2可见,虽然a相(U相)绕组(红色)的位置同处于电磁场波形的峰值中心(特定角度),但FOC控制下,a相(U相)中心与永磁体的q轴对齐;而空载定向时,a相(U相)中心却与d轴对齐。
也就是说相对于初级(定子)绕组而言,次级(转子)磁体坐标系的d轴在空载定向时有会左移90度电角度,与FOC控制下q轴的原有位置重合,这样就实现了转子空载定向时a轴(U轴)或α轴与d轴间的对齐关系。
此时相位对齐到电角度0度,电机绕组中施加的转子定向电流的方向为bc相(VW相)入,a相(U相)出,由于b相(V相)与c相(W相)是并联关系,流经b相(V相)和c相(W相)的电流有可能出现不平衡,从而影响转子定向的准确性。
实用化的转子定向电流施加方法是b相(V相)入,a相(U相)出,即a相(U相)与b相(V相)串联,可获得幅值完全一致的a相(U相)和b相(V相)电流,有利于定向的准确性,此时a相(U相)绕组(红色)的位置与d轴差30度电角度,即a轴(U轴)或α轴对齐到与d轴相差(负)30度的电角度位置上,如图所示:
图4
上述两种转子定向方法对应的绕组相反电势波形和线反电势,以及电角度的关系如下图所示,棕色线为a轴(U轴)或α轴与d轴对齐,即直接对齐到电角度0点;紫色线为a轴(U轴)或α轴对齐到与d轴相差(负)30度的电角度位置,即对齐到-30度电角度点:
图5
上述两种转子定向方法在dq转子坐标系和abc(UVW)或αβ定子坐标系中的矢量关系如图6所示:
图6
图中棕色实线所示的d轴与a轴(U轴)或α轴对齐,即对齐到电角度0点。
对齐方法是对电机绕组施加电角度相位固定为-90度的电流矢量,如图中棕色虚线所示,空载下电机转子的d轴会移向FOC控制下电角度相位为-90度的电流矢量q轴分量所处的位置,即图中与a轴或α轴重合的位置,并最终定向于该位置,即电角度0度。
紫色实线所示的d 轴与a轴(U轴)或α轴相差30度,即对齐到-30度电角度点。
对齐方法是对电机绕组施加电角度相位固定为-120度的电流矢量,空载下电机转子的d轴会移向在FOC下电角度相位为-120度的电流矢量q轴分量所处的位置,即图中与a轴或α轴沿顺时针方向相差30度的位置,并最终定向于该位置,即电角度-30度。
说明一点:
文中有关U、V、W相和a、b、c相,U、V、W轴和a、b、c轴的叙述具有一一对应关系。
主流的伺服电机位置反馈元件包括增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等。
增量式编码器的相位对齐方式
在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,V入,U出,将电机轴定向至一个平衡位置;
2.用示波器观察编码器的U相信号和Z信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:
1.用示波器观察编码器的U相信号和电机的UV线反电势波形;
2.逆时针转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。
上述验证方法,也可以用作对齐方法。
需要注意的是,此时增量式编码器的U相信号的相位零点与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。
有些伺服企业习惯于将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以:
1.用一个直流电源给电机的UVW绕组通以小于额定电流的直流电,VW入,U出,将电机轴定向至一个平衡位置;
2.用示波器观察编码器的U相信号和Z信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
验证方法如下:
1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线;
2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形;
3.逆时针旋转电机轴,可见编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点重合。
上述验证方法,也可以用作对齐方法。
由于普通增量式编码器不具备UVW相位信息,而Z信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而不作为本讨论的话题。
绝对式编码器的相位对齐方式
绝对式编码器的相位对齐对于单圈和多圈而言,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。
早期的绝对式编码器会以单独的引脚给出单圈相位的最高位的电平,利用此电平的0和1的翻转,也可以实现编码器和电机的相位对齐,方法如下:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,V入,U出,将电机轴定向至一个平衡位置;
2.用示波器观察绝对编码器的最高计数位电平信号;
3.调整编码器转轴与电机轴的相对位置;
4.一边调整,一边观察最高计数位信号的跳变沿,直到跳变沿准确出现在电机轴的定向平衡位置处,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,跳变沿都能准确复现,则对齐有效。
这类绝对式编码器目前已经被采用EnDAT,BiSS,Hyperface等串行协议,以及日系专用串行协议的新型绝对式编码器广泛取代,因而最高位信号就不符存在了,此时对齐编码器和电机相位的方法也有所变化,其中一种非常实用的方法是利用编码器内部的EEPROM,存储编码器随机安装在电机轴上后实测的相位,具体方法如下:
1.将编码器随机安装在电机上,即固结编码器转轴与电机轴,以及编码器外壳与电机外壳;
2.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,V入,U出,将电机轴定向至一个平衡位置;
3.用伺服驱动器读取绝对编码器的单圈位置值,并存入编码器内部记录电机电角度初始相位的EEPROM中;
4.对齐过程结束。
由于此时电机轴已定向于电角度相位的-30度方向,因此存入的编码器内部EEPROM中的位置检测值就对应电机电角度的-30度相位。
此后,驱动器将任意时刻的单圈位置检测数据与这个存储值做差,并根据电机极对数进行必要的换算,再加上-30度,就可以得到该时刻的电机电角度相位。
这种对齐方式需要编码器和伺服驱动器的支持和配合方能实现,日系伺服的编码器相位之所以不便于最终用户直接调整的根本原因就在于不肯向用户提供这种对齐方式的功能界面和操作方法。
这种对齐方法的一大好处是,只需向电机绕组提供确定相序和方向的转子定向电流,无需调整编码器和电机轴之间的角度关系,因而编码器可以以任意初始角度直接安装在电机上,且无需精细,甚至简单的调整过程,操作简单,工艺性好。
如果绝对式编码器既没有可供使用的EEPROM,又没有可供检测的最高计数位引脚,则对齐方法会相对复杂。
如果驱动器支持单圈绝对位置信息的读出和显示,则可以考虑:
1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,V入,U出,将电机轴定向至一个平衡位置;
2.利用伺服驱动器读取并显示绝对编码器的单圈位置值;
3.调整编码器转轴与电机轴的相对位置;
4.经过上述调整,使显示的单圈绝对位置值充分接近根据电机的极对数折算出来的电机-30度电角度所应对应的单圈绝对位置点,锁定编码器与电机的相对位置关系;
5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,上述折算位置点都能准确复现,则对齐有效。
如果用户连绝对值信息都无法获得,那么就只能借助原厂的专用工装,一边检测绝对位置检测值,一边检测电机电角度相位,利用工装,调整编码器和电机的相对角位置关系,将编码器相位与电机电角度相位相互对齐,然后再锁定。
这样一来,用户就更加无从自行解决编码器的相位对齐问题了。
个人推荐采用在EEPROM中存储初始安装位置的方法,简单,实用,适应性好,便于向用户开放,以便用户自行安装编码器,并完成电机电角度的相位整定。
正余弦编码器的相位对齐方式
普通的正余弦编码器具备一对正交的sin,cos 1Vp-p信号,相当于方波信号的增量式编码器的AB正交信号,每圈会重复许许多多个信号周期,比如2048等;以及一个窄幅的对称三角波Index信号,相当于增量式编码器的Z信号,一圈一般出现一个;这种正余弦编码器实质上也是一种增量式编码器。
另一种正余弦编码器除了具备上述正交的sin、cos信号外,还具备一对一圈只出现一个信号周期的相互正交的1Vp-p的正弦型C、D信号,如果以C信号为sin,则D信号为cos,逆时针旋转编码器轴,相当于Z信号的Index信号一般
 升级会员
升级会员 