第二章刚体的位置和姿态.docx
《第二章刚体的位置和姿态.docx》由会员分享,可在线阅读,更多相关《第二章刚体的位置和姿态.docx(14页珍藏版)》请在冰豆网上搜索。
第二章刚体的位置和姿态
第二部分运动学
运动学是研究物体作机械运动的几何性质,而不涉及引起运动的原因,也就是说,不涉及物体的受力。
物体的机械运动是指物体的空间位置随时间的变化,这种变化具有相对性,即对于不同的参照物这种变化具有不同的描述,因此,选取参考系或称参考基是运动学分析首先要解决的问题。
其次,要研究物体及物体系统(刚体及刚体系)的位置、速度和加速度的变化以及它们在构件及机构中的传递,它们的数学模型如何表达,对这些变量如何分析和计算等。
我们仅仅研究刚体作平面运动的运动学。
第二章刚体的位置和姿态
运动学问题是研究物体或物体系统在空间的运动情况,即它或它们的空间形态如何随时间变化,以及它们形态之间的相互关系等等。
为此,我们首先要解决的是,对它或它们的空间形态如何描述的问题。
在《大学物理》课程里,我们已经学习了点的运动,但是物体的运动远比点的运动复杂,因为点只有位置而没有姿态,一个物体可以看作由无数的点组成,在运动过程中各个点的运动一般情况下是不一样的,也就是说,一个物体的运动不能视为一个点的运动。
体育比赛之所以能够吸引数以千万计的目光,是因为大家不仅将运动员在比赛场地的状态视为一个点的运动,更主要的是欣赏他们力量型的或优美型的姿态。
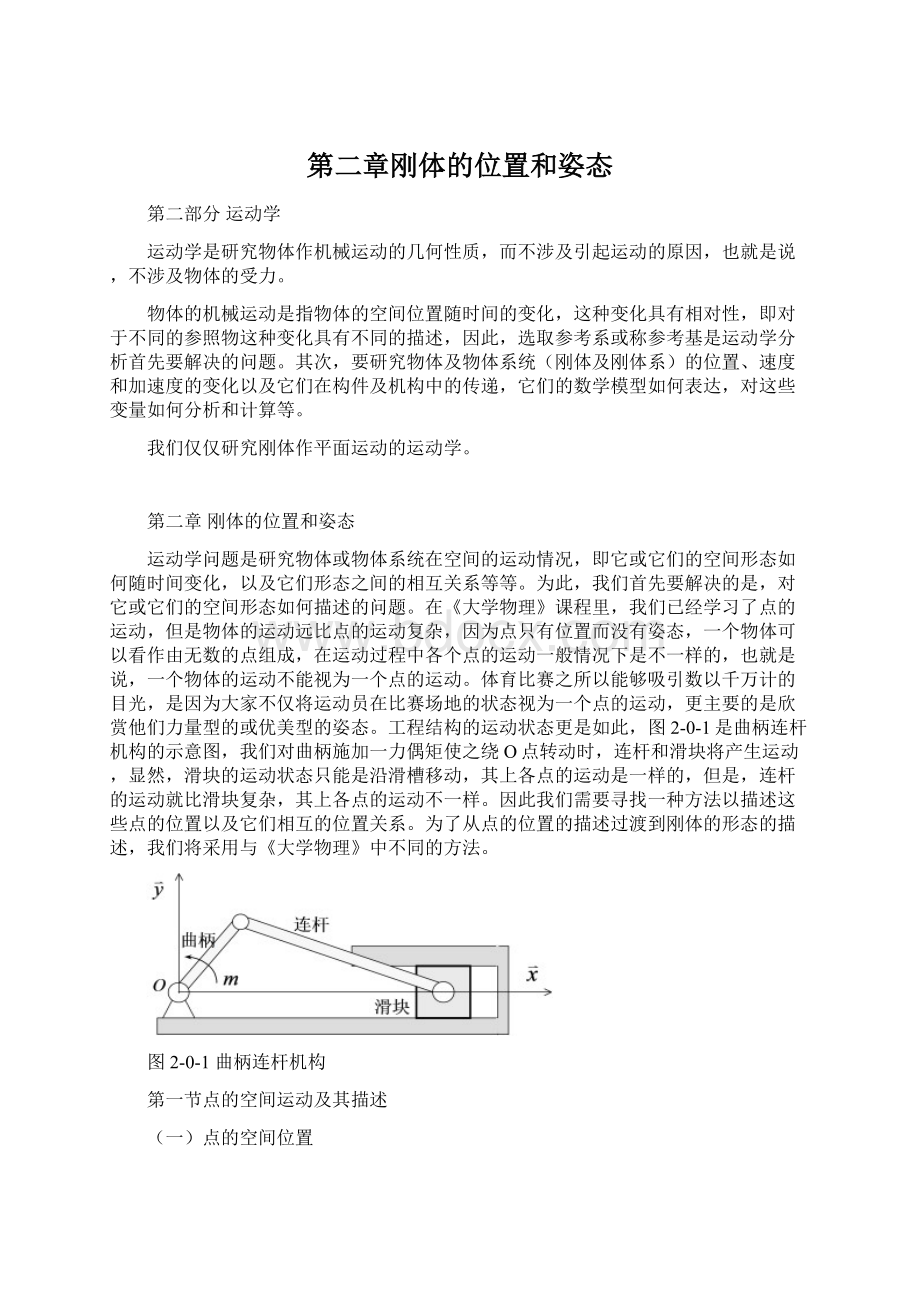
工程结构的运动状态更是如此,图2-0-1是曲柄连杆机构的示意图,我们对曲柄施加一力偶矩使之绕O点转动时,连杆和滑块将产生运动,显然,滑块的运动状态只能是沿滑槽移动,其上各点的运动是一样的,但是,连杆的运动就比滑块复杂,其上各点的运动不一样。
因此我们需要寻找一种方法以描述这些点的位置以及它们相互的位置关系。
为了从点的位置的描述过渡到刚体的形态的描述,我们将采用与《大学物理》中不同的方法。
图2-0-1曲柄连杆机构
第一节点的空间运动及其描述
(一)点的空间位置
首先建立一个惯性参考基,我们用矢径
表示点A在惯性参考基中的空间位置,该矢量从参考基基点O出发到达点A,方向指向A,
如图2-1-1所示。
矢径
可以用参考基的基矢量表
示为:
(2-1-1)
其中
、
和
分别为该矢径在x、y、z轴的三个分
量。
我们已经知道,矢径
的矩阵表示为:
(2-1-2)图2-1-1
(二)点的速度和加速度
1.点的速度
根据速度的定义,点A的速度是其位置对时间的一次微分,即:
(2-1-3)
式中,考虑到惯性参考系是固定坐标系,不随时间变化,因此,三个坐标轴的单位矢量对时间的微分等于零。
上式同样可以用矩阵表示为:
(2-1-4)
或者记为:
(2-1-5)
2.点的加速度
将速度对时间再次微分可以得到点A的加速度:
(2-1-6)
写作矩阵形式为:
(2-1-7)
或者记为:
(2-1-8)
上面各式中,惯性系坐标轴的单位矢量对时间的微分同样为零。
[例2-1-1]细杆O1A绕O1轴以
的规律运动,ω为常量,该细杆上套有一小环M,小环同时又套在半径为r的固定圆环上,如图2-1-2,求小环的速度和加速度。
[解]:
如图,以O为原点建立惯性坐标系,M点的
位置为
(1)
M点的速度用矩阵表示为:
(2)图2-1-2
其中,M点的速度沿x轴和y轴的分量分别为:
(3)
因此,M点的速度大小为:
(4)
M点的加速度用矩阵表示为:
(5)
这里,由于
常量,
。
M点的加速度沿x轴和y轴的分量分别为:
(6)
因此,M点的加速度大小为:
(7)
此时,如果将M点的加速度分别向M点在圆周的切向和法向投影,可得:
(8)
第二节广义坐标和自由度
(一)广义坐标的概念
为了进一步讨论物体的位置和姿态的描述,需要引进广义坐标的概念。
我们已经习惯于用直角坐标描写一个点的位置,如图2-2-1(a),点M在xoy坐标平面内(也称基平面)的位置由其坐标值x和y唯一确定。
但是,这种描述是否就是唯一的呢?
显然不是,比如,可以采用极坐标描述,见图(b)。
实际上还可以由其他的描述,图(c)中用面积A和角度ϕ确定点的位置等等。
由此可见,确定一个点的位置的一组参数不是唯一的。
为此,我们引入广义坐标的概念:
如果存在一组相互独立的参数q1,q2,…,qn,只要他们能够确定点的位置,不管这些参数的几何意义如何,这一组参数就称为这个点的广义坐标。
比如上面的例子中,(x,y),(r,ϕ)和(A,ϕ)等都是M点的广义坐标。
一个点是如此,一个物体也是如此。
图2-2-1
因此,广义坐标可以写作下面的通式:
(2-1-1)
上式中,q1,q2,…,qn,为i点的广义坐标,时间t为参变量。
将上式对时间求导,即得到i点的速度为:
(2-2-2)
其中,
相应地称为广义速度。
如果i点的位置描述函数中不显含时间t,则上式右边第二项应等于零。
[例2-2-1]空间一动点M,若选取参数r,θ,ϕ为广义坐标,如图2-2-2所示,求动点M的速度。
[解]:
依题意,有:
(1)
由几何关系可得:
(2)
在笛卡尔直角坐标系中,M点的速度坐标阵为:
图2-2-2
(3)
由
(2)式,有
(4)
即
(5)
最后可得M点的速度大小用广义坐标表示为:
(6)
(二)完整系统的概念
多个质点的集合可以组成一个质点系统,根据系统的运动是否受到预先规定的几何及运动条件制约的情况,可以将该质点系统分为自由系统和非自由系统。
图2-2-3中,(a)为空中自由飘动的气球,因而是
一自由系统,图(b)中,物体B只能限
制在环形轨道内运动,因而是一非自由系
统。
对于非自由系统,那些预先规定的、
与初始条件及受力条件无关的、限制系统
的几何位置或(和)速度的运动学条件称为约束。
图2-2-3
在多种约束类型中,我们只介绍完整约束。
仅仅限制系统的几何位置和形态的约束称为完整约束,如果用xi、yi、zi表示系统第i个质点的笛卡尔直角坐标,那麽由N个质点组成的系统的完整约束的约束方程可以写作下面的通式:
(2-2-3)
完整约束又称为几何约束。
换句话说,这种约束只有位置和姿态的约束而没有速度和加速度的限制。
[例2-2-2]一个半径为R的轮子沿斜面向下滚动而不滑动,如图2-2-4所示,分析轮子所受的约束。
[解]:
如果沿斜面向下为x轴建立平面
参考基,如图,由于轮子只能在斜面
上运动,所以其形心C的位置到斜面
的距离不会改变,即存在几何位置的
约束:
图2-2-4
(1)
另一方面,轮子沿x轴的坐标位置就是轮子滚过的轨迹:
(b)
其中,ϕ是轮子转过的角度,C0是质心沿斜面的初始位置,假设轮子开始时形心C在y轴上,则C0=0。
可见,该轮子受到完整约束,共有两个约束方程。
(三)自由度的概念
一个由N个质点组成的系统,在笛卡尔直角坐标空间中,共有3N个坐标,如果该系统是自由的,则需要3N个坐标参数来确定其空间位置。
如果受到完整约束,即受到预先给定的几何位置的限制,显然该系统就不再需要3N个坐标参数来确定其空间位置了,如果存在l个完整约束,即有l个完整约束方程,则该系统仅需要n=3N-l个坐标参数就可以确定该系统的几何位置,当然,这n个坐标参数必须相互独立。
我们将n称为该完整系统的自由度。
前面已经介绍过广义坐标的概念,一个物体或一个系统可以用广义坐标描述其位置和姿态,而一个物体或一个系统的广义坐标不是唯一的,但是每一组广义坐标的各个参数必须是相互独立的。
对于完整系统,任一组广义坐标中坐标参数的个数应该等于该系统的自由度。
也就是说,一个完整系统的自由度为n,则确定该系统的广义坐标数也为n。
如例2-2-2,轮子在xy基平面上的形态需要3个坐标描述,
第三节刚体位置和姿态的描述
(一)单个刚体的自由度
一个自由刚体,不受任何限制在笛卡尔直角坐标空间中运动,它具有6个自由度,包括沿3个基矢量方向的移动和绕3个基矢量的转动。
比如一条船在水中航行,要确定这条船在水中的位置和姿态,需要确定它的前进后退、左右移动、上浮下沉这3个整体的移动情况,还要知道该船体绕由船头到船尾这条轴线的转动(称为横摇)、船头相对船尾的俯仰运动(称为纵摇)以及该船航向的改变运动(称为偏航)。
这些运动状态需要6个相互独立的参数加以描写,所以船在水中航行一共有6个自由度。
前3个称为移动自由度,用以确定船体的位置;后3个称为转动自由度,用以确定船体的姿态,参见图2-3-1。
如果刚体不是自由的,受到预先给定的几何位置的限制,它的自由度将减少。
比如将物体限制在某个基平面内运动,如图2-3-2,将杆AB限制在xoy基平面内运动,此时,杆AB的几何位置受到的限制包括:
1杆AB上任一点的z坐标值都等于零;
2绕x轴不能产生转动;
3
绕y轴不能产生转动。
图2-3-1船在水中的自由度图2-3-2做平面运动杆的自由度
于是,杆AB还剩下3个自由度,即沿x轴和y轴的移动和绕z轴(垂直纸面)的转动。
杆AB的自由度还可以这样确定,该杆的位置和姿态取决于A和B两点的位置,A和B两点各有两个坐标参数(xA,yA)和(xB,yB)共4个坐标参数,而该杆存在一个完整约束,即杆AB的长度不变且等于L:
所以杆AB的自由度为n=4-1=3。
(二)齐次坐标与齐次变换的概念
1.惯性参考基和刚体连体基
物体的大小不一、形状各异,我们将刚体在空间的位置和姿态统称为刚体的位形。
为了采用广义坐标描述刚体的位置和姿态,需要建立两个矢量参照基,一个是惯性参考基,一般认为,惯性参考基与地球固定,我们称之为参考基,也称定基;另一个是固定在刚体上的矢量基,该矢量基将随物体一起运动,我们称之为动基。
一旦建立了这两个矢量基,我们就可以利用两个矢量基的空间关系来确定刚体的位形。
我们将矢量基的原点称之为基点,将矢量基3个坐标轴的单位向量称为基矢量。
为了描述矢量基之间的关系,需要介绍有关齐次坐标及其变换的概念。
2.齐次坐标
我们把不同时等于零的四个数组成的列向量
称为三维空间里点的齐次坐标。
点的齐次坐标与该点笛卡尔直角坐标
的关系为:
(2-3-1)
显然,一个点的齐次坐标不是唯一的,或者说,一个点的齐次坐标具有多值性。
例如,设P点的齐次坐标为
(2-3-2)
根据(2-3-1)式,λ≠0时有
(2-3-3)
说明(2-3-2)和(2-3-3)都是P点的齐次坐标。
3.
齐次变换
一个点可以用齐次坐标表示,一个物体
如何用齐次坐标描述呢?
如图2-3-3,o-xyz
为惯性参考基,ob-xbybzb为物体的连体基,
连体基的基点ob在惯性参考基中的位置用
向径
表示,A为刚体上的任意点,假设A图2-3-3
相对其连体基用向径
表示,其在连体基上的分量分别为Qxb、Qyb和Qzb,如何确定A在惯性参考基中的位置?
这个问题的解决并不难,只要将Qx、Qy和Qz分别投影到惯性参考基三个基矢量上就可以的得到,当然,此时还需要知道连体基和惯性参考基基矢量之间的夹角。
现将两个矢量基的基矢量之间夹角的余弦值列于表2-3-1中,于是可以得到如下关系:
(2-3-4)
其中,r1、r2、r3分别表示连体基基点在惯性参考基中的位置。
表2-3-1动参考系与定参考系坐标轴间夹角的余弦值
xb
yb
zb
x
y
z
如果采用齐次坐标表示A点的位置,对于连体基和惯性参考基分别设为:
和
上个轴就可以的得到。
用向径
利用齐次坐标与笛卡尔直角坐标间的关系、即(2-3-1)式,(2-3-4)式可以改写为:
(2-3-5)
根据齐次坐标的多值性,可以令
,代入上式,将上式进一步改写为:
(2-3-6)
上是采用矩阵描述则为:
(2-3-7)
简记为:
(2-3-8)
其中,T称为齐次变换矩阵,即
(2-3-9)
值得关注的是,(2-3-8)式带有普遍的意义,X可以看作用惯性参考基表示的任意矢量,而X′则是该矢量的动参考基表示。
当然,在(2-3-8)式中,X和X′均为矢量的齐次坐标形式,齐次变换矩阵T中的元素参见表2-3-1。
(三)刚体位置和姿态的齐次坐标描述
正如前面分析的,如果我们将固定于刚体上的矢量基称为连体基,该连体基将同刚体一起运动,因此,刚体相对惯性参考基的位置和形态就可以利用附体坐标系来表示,这具有普遍的意义,因为此时可以不计刚体的大小和形状。
由(2-3-8)式的推导过程可以知道,变换矩阵T实际上反映了动参考基与定参考基的空间关系,刚体的连体基也是动参考基,因此,变换矩阵T也描述了刚体相对惯性参考基的空间关系。
进一步考察变换矩阵T,可以将其写作下面的分解形式:
(2-3-10)
这里,Tr称为移动变换,它表示连体基与惯性基平行,仅仅连体基基点发生移动,并且沿惯性基的x、y、z轴分别移动了r1、r2、r3;Tα称为转动变换,它表示连体基与惯性基基点重合,但基矢量间的夹角发生变化,也就是说连体基相对惯性基仅仅产生转动。
因此,我们也可以说,Tr描述了刚体的位置变化关系,而Tα描述了刚体的姿态变化关系,同时由(2-3-10)式也可以看出,移动变换与转动变换是相互独立的,换句话说,刚体相对惯性基的位置变化与姿态的变化是相互独立的。
 升级会员
升级会员 