机械手电气设计说明书.docx
《机械手电气设计说明书.docx》由会员分享,可在线阅读,更多相关《机械手电气设计说明书.docx(10页珍藏版)》请在冰豆网上搜索。
机械手电气设计说明书
设计的任务
(1)、基本情况介绍
机械手结构、动作与控制要求
机械手在专用机床及自动生产线上应用十分广泛,主要用于搬动或装卸零件的重复动作,以实现生产自动化。
本设计中的机械手采用关节式结构。
各动作由液压驱动,并右电磁阀控制。
动作顺序及各动作时间的间隔采用按时间原则控制的电气控制系统。
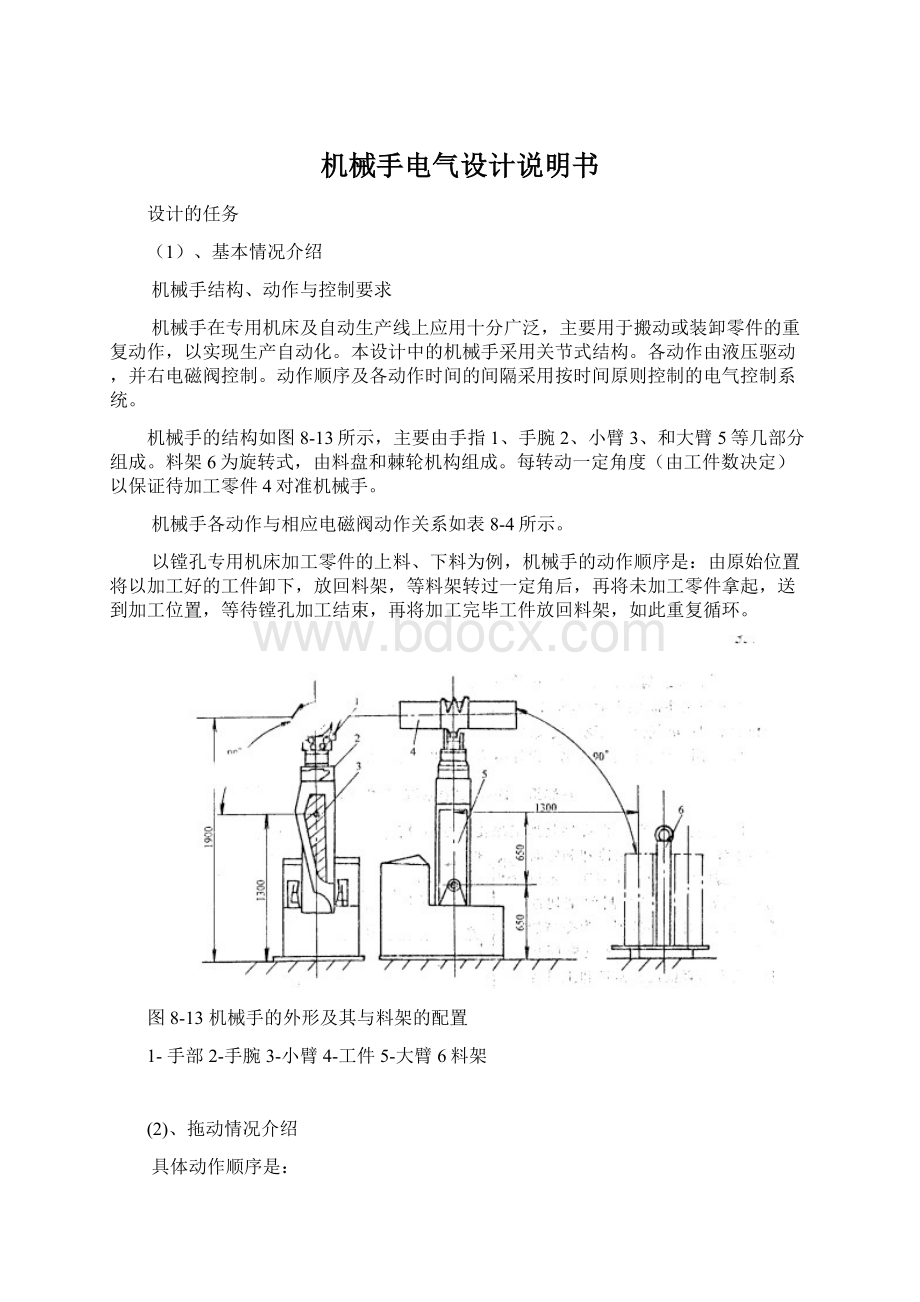
机械手的结构如图8-13所示,主要由手指1、手腕2、小臂3、和大臂5等几部分组成。
料架6为旋转式,由料盘和棘轮机构组成。
每转动一定角度(由工件数决定)以保证待加工零件4对准机械手。
机械手各动作与相应电磁阀动作关系如表8-4所示。
以镗孔专用机床加工零件的上料、下料为例,机械手的动作顺序是:
由原始位置将以加工好的工件卸下,放回料架,等料架转过一定角后,再将未加工零件拿起,送到加工位置,等待镗孔加工结束,再将加工完毕工件放回料架,如此重复循环。
图8-13机械手的外形及其与料架的配置
1-手部2-手腕3-小臂4-工件5-大臂6料架
(2)、拖动情况介绍
具体动作顺序是:
原始位置(装好工件等待加工位置,其状态是大手臂竖立,小手臂伸出并处于水平位置,手腕很横移向右,手指松开)——手指夹紧(抓住卡盘上的工件)——松卡盘——手腕左移(从卡盘上卸下已加工好的工件)——小手臂上摆——大手臂下摆——手指松开(工件放回料架)——小手臂收缩——料架转位——小手臂伸出——手指夹紧(抓住未加工零件)——大手臂上摆(取送零件)——小手臂下摆——手腕右移(将工件装到机床的主轴卡盘中)——卡盘收紧——手指松开,等待加工。
表8-4电磁阀状态表
YV1
YV2
YV3
YV4
YV5
YV6
YV7
YV8
YV9
YV10
YV11
手指的夹紧与放松
夹紧
+
放松
+
手腕横向移动(左右移动)
左移
+
右移
+
小臂的伸缩
伸
+
缩
+
小臂上下摆动
上摆
+
下摆
+
大臂上下摆动
上摆
+
下摆
+
+
根据表8-4及各动作中机械的状态,便可自行列出各动作中对YV1-YV11线圈的通电要求。
(3)、设计要求
1)加工中上料、下料各动作采用自动循环。
2)各动作之间应有一定的延(由时间继电器调定)。
3)机械手各部分应能单独动作,以便于调整及维修。
4)油泵电机(采用Y100L2-4.3KW)及各电磁阀运行状态应有指示。
5)应有必要的电气保护与联锁环节。
二、设计过程
(一)、总体方案选择说明
机械手的分类
工业机械手的种类很多,关于分类的问题,目前在国内尚无统一的分类标准,在此暂按使用范围、驱动方式和控制系统等进行分类。
1按用途分
机械手可分为专用机械手和通用机械手两种:
1.1专用机械手
它是附属于主机的、具有固定程序而无独立控制系统的机械装置。
专用机械手具有动作少、工作对象单一、结构简单、使用可靠和造价低等特点,适用于大附属,如自动机床、自动线的上、下料机械手和‘加工中心”批量的自动化生产的自动换刀机械手。
1.2通用机械手
它是一种具有独立控制系统的、程序可变的、动作灵活多样的机械手。
通过调整可在不同场合使用,驱动系统和格性能范围内,其动作程序是可变的,控制系统是独立的。
通用机械手的工作范围大、定位精度高、通用性强,适用于不断变换生产品种的中小批量自动化的生产。
通用机械手按其控制定位的方式不同可分为简易型和伺服型两种:
简易型以“开一关”式控制定位,只能是点位控制:
伺服型具有伺服系统定位控制系统,可以点位控制,也可以实现连续轨迹控制,一般的伺服型通用机械手属于数控类型。
2按驱动方式分
2.1液压传动机械手
是以液压的压力来驱动执行机构运动的机械手。
其主要特点是:
抓重可达几百公斤以上、传动平稳、结构紧凑、动作灵敏。
但对密封装置要求严格,不然油的泄漏对机械手的工作性能有很大的影响,且不宜在高温、低温下工作。
若机械手采用电液伺服驱动系统,可实现连续轨迹控制,使机械手的通用性扩大,但是电液伺服阀的制造精度高,油液过滤要求严格,成本高。
2.2气压传动机械手是以压缩空气的压力来驱动执行机构运动的机械手。
其主要特点是:
介质来源极为方便,输出力小,气动动作迅速,结构简单,成本低。
但是,由于空气具有可压缩的特性,工作速度的稳定性较差,冲击大,而且气源压力较低,抓重一般在30公斤以下,在同样抓重条件下它比液压机械手的结构大,所以适用于高速、轻载、高温和粉尘大的环境中进行工作。
2.3机械传动机械手
即由机械传动机构(如凸轮、连杆、齿轮和齿条、间歇机构等)驱动的机械手。
它是一种附属于工作主机的专用机械手,其动力是由工作机械传递的。
它主要特点是运动准确可靠,动作频率大,但结构较大,动作程序不可变。
它常被用于工作主机的上、下料。
2.4电力传动机械手
即有特殊结构的感应电动机、直线电机或功率步进电机直接驱动执行机构运动的机械手,因为不需要中间的转换机构,故机械结构简单。
其中直线电机机械手的运动速度快和行程长,维护和使用方便。
此类机械手目前还不多,但有发展前途。
按控制方式分
3.1点位控制
它的运动为空间点到点之间的移动,只能控制运动过程中几个点的位置,不能控制其运动轨迹。
若欲控制的点数多,则必然增加电气控制系统的复杂性。
目前使用的专用和通用工业机械手均属于此类。
3.2连续轨迹控制
它的运动轨迹为空间的任意连续曲线,其特点是设定点为无限的,整个移动过程处于控制之下,可以实现平稳和准确的运动,并且使用范围广,但电气控制系统复杂。
这类工业机械手一般采用小型计算机进行控制[4]。
本设计中的机械手采用关节式结构,并右电磁阀控制。
动作顺序及各动作时间的间隔采用按时间原则控制的电气控制系统。
原始位置(装好工件等待加工位置,其状态是大手臂竖立,小手臂伸出并处于水平位置,手腕很横移向右,手指松开)——手指夹紧(抓住卡盘上的工件)——松卡盘——手腕左移(从卡盘上卸下已加工好的工件)——小手臂上摆——大手臂下摆——手指松开(工件放回料架)——小手臂收缩——料架转位——小手臂伸出——手指夹紧(抓住未加工零件)——大手臂上摆(取送零件)——小手臂下摆——手腕右移(将工件装到机床的主轴卡盘中)——卡盘收紧——手指松开,等待加工。
(2)、控制方式选择
根据要求选择用电气控制,由油泵电机(采用Y100L2-4.3KW)驱动,继电器,时间继电器,限位开关控制。
(三)、设计电气原理图
电气控制设计图及继电器控制
机械手电气控制系统工作流程图
继电器控制
YV1手指夹紧YV2手指放松
YV3手腕左移YV4手腕右移
YV5小臂伸出YV6小臂收缩
YV7小臂上摆YV8小臂下摆
YV9大臂上摆YV10大臂下摆
限位开关
SQ0手指夹紧限位开关SQ1手指放松限位开关
SQ2手腕左移限位开关SQ3手腕右移限位开关
SQ4小臂伸出限位开关SQ5小臂收缩限位开关
SQ6小臂上摆限位开关SQ7小臂下摆限位开关
SQ8大臂上摆限位开关SQ9大臂下摆限位开关
输出原件逻辑表达式
时序逻辑状态表如下
1、主电路设计
见附录1
2、控制电路设计
见附录2
3、按设计要求检查各动作程序,各种保护联锁等全部符合要求,绘制电气控制纵原理图
三、设计小结
此次电气机械手电气控制系统设计让我重新研究电气的控制技术,并且自学电气CAD,从以前的略懂到现在比较深入了解工业电气控制的一些环节和设备,并且比较全面的将所学的电气控制和电力拖动方面的知识运用于设计当中。
整个机械手电气控制系统设计分阶段地有循环的完成,从电气控制的设计到电力拖动方面的设计。
从开始的照搬书本上的例题作改进,到之后自己用时序法设计出来,并且考虑了电气互锁等条件,然而自己的知识终归有限,考虑的东西肯定有不周到之处,而且电路图也未经实际电路检验,但是这个课程设计还是让我收获很多。
附录一
主电路图
附录二
分解控制电路图1
分解控制电路图2
WelcomeTo
Download!
!
!
欢迎您的下载,资料仅供参考!
 升级会员
升级会员 