完整版毕业设计外文翻译排完版90446819.docx
《完整版毕业设计外文翻译排完版90446819.docx》由会员分享,可在线阅读,更多相关《完整版毕业设计外文翻译排完版90446819.docx(9页珍藏版)》请在冰豆网上搜索。
完整版毕业设计外文翻译排完版90446819
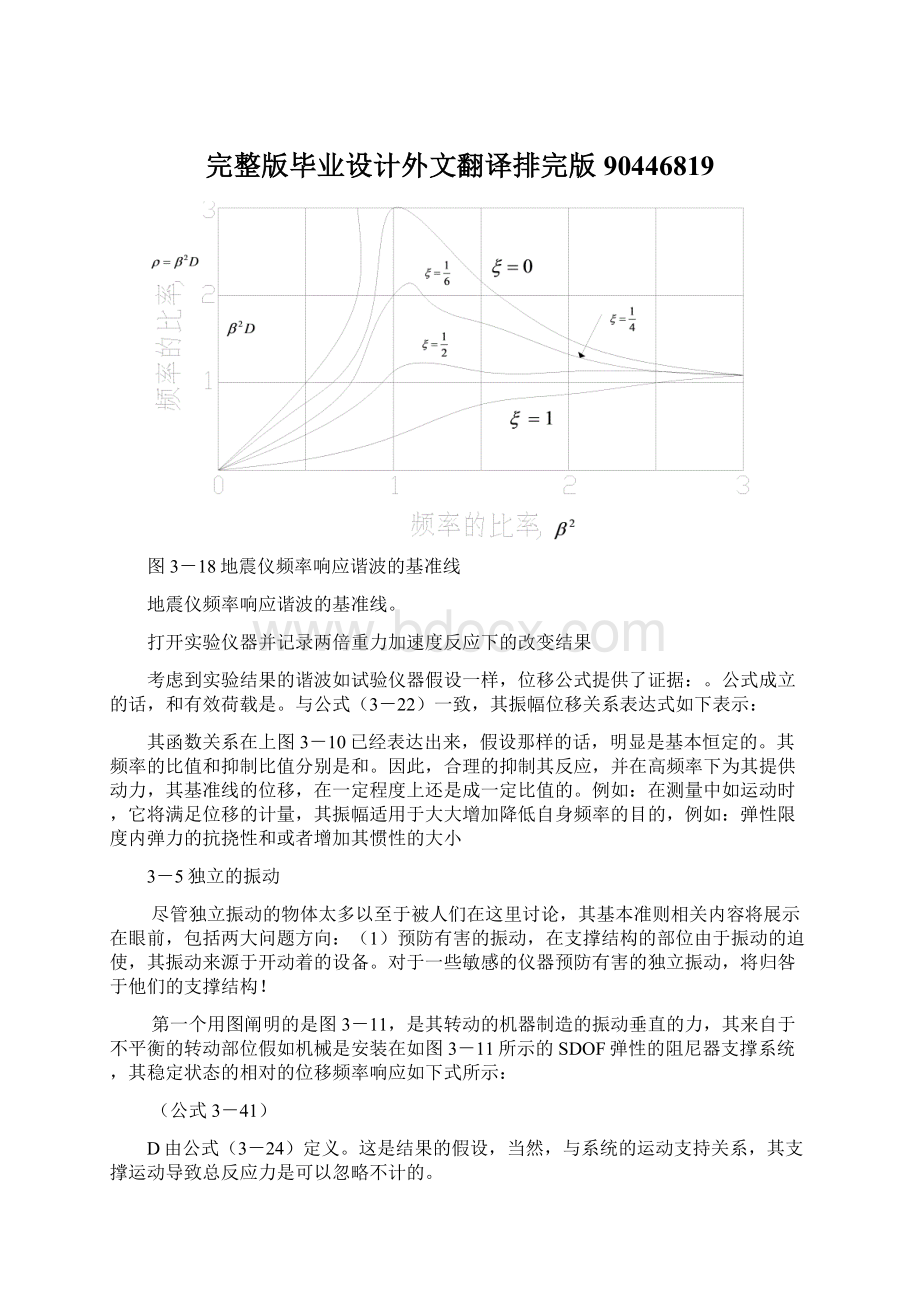
图3-18地震仪频率响应谐波的基准线
地震仪频率响应谐波的基准线。
打开实验仪器并记录两倍重力加速度反应下的改变结果
考虑到实验结果的谐波如试验仪器假设一样,位移公式提供了证据:
。
公式成立的话,和有效荷载是。
与公式(3-22)一致,其振幅位移关系表达式如下表示:
其函数关系在上图3-10已经表达出来,假设那样的话,明显是基本恒定的。
其频率的比值和抑制比值分别是和。
因此,合理的抑制其反应,并在高频率下为其提供动力,其基准线的位移,在一定程度上还是成一定比值的。
例如:
在测量中如运动时,它将满足位移的计量,其振幅适用于大大增加降低自身频率的目的,例如:
弹性限度内弹力的抗挠性和或者增加其惯性的大小
3-5独立的振动
尽管独立振动的物体太多以至于被人们在这里讨论,其基本准则相关内容将展示在眼前,包括两大问题方向:
(1)预防有害的振动,在支撑结构的部位由于振动的迫使,其振动来源于开动着的设备。
对于一些敏感的仪器预防有害的独立振动,将归咎于他们的支撑结构!
第一个用图阐明的是图3-11,是其转动的机器制造的振动垂直的力,其来自于不平衡的转动部位假如机械是安装在如图3-11所示的SDOF弹性的阻尼器支撑系统,其稳定状态的相对的位移频率响应如下式所示:
(公式3-41)
D由公式(3-24)定义。
这是结果的假设,当然,与系统的运动支持关系,其支撑运动导致总反应力是可以忽略不计的。
图:
3-11
荷载作用下的SODF独自振动系统
运用公式,(3-41)和其第一次导数,其弹性和阻尼反应力可推导得:
因此,这两个力是相互垂直的,不协调的!
明显,其总的基准线力振幅如下所示:
因此,最大值的比率基准线力由振幅已知的(TR)支撑体系力所给,所以:
(3-44)
第二种独立的振动情况是很重要的,如图示.3-12所示,其谐波提供支撑运动力是一个稳定的状态,其相对的位移表示:
和公式(3-21)和(3-40)一致的公式,增加其运动矢量地去支持运动
(3-46)
在这个公式中角度不是特殊感兴趣讨论的。
因此,假如其可变速性在这个情形中,被定义为振幅的比率,在总的运动中有大量的与之一致的基数,可变速性表达式可以由公式(3-47),例如:
(3-47)
图3-12SDFD独立振动系统(支撑激振)
记录可变速性的关系同样也是适用于加速度比率,因为
。
这和可变速性关系如公式.(3-44)和(3-47)给出来也是一样的,他们相同的表达独立系统振动可变速性的方式,同样也使用于他们所处环境所描述的。
其机械运作的频率比值被简单概要如图示.3-13所示的(离散阻尼数值)。
在频率的比率为记录下所有曲线通过的所有点。
因为这些都是些清楚的重要特征,当增加有效的独立振动系统,将增加其阻尼。
然而当增加其阻尼将降低其有效性。
其可变性的值是通常比低的多,所以必须提高其在高频率的比率下先进的操作方式。
这是不经常可能的,然而,因为在许多情况中,系统必须在一定的时间间隔以下运行。
在一些实际情况下,运行接近将会引起共鸣。
接下来,将用几个图解的例子,解释他们的关系条件:
例子E3-2.混凝土桥梁的支座在一些情况下,挠度发展归咎于其变形,假如桥梁由一系列的同样跨度连续的支座组成,这些变形将因为一些车辆以匀速通过桥梁的简谐的振动引起的。
当然,车将被改造为独立的振动系统,使其弹性和冲击的吸收,将有助于限制又车辆运输引起的变形.
图示E3-1显示在理想化的模型下的体系,车辆重和其弹性的抗挠度由试验可得,图示每增加将引起的挠度变化。
桥梁的外形变化,由一个正弦曲线表达出来,其波长(梁,钢桁的支架)为和一个单一的振幅。
从这些数据还是可以得到的,可以预测车子当其运行速度高达垂直方向稳定性,假设其阻尼有40%的折减。
在这个例子里,其可变性可由公式.(3-47)给出;因此,其垂直方向的振幅是:
图E3-1理想化的车辆行驶通过不平坦的场地
当车行驶的速度达,激振周期为
然而,其车辆的自然周期为:
因此,
,和当其振幅的特征曲线为
我们也研究车辆在没有阻尼的下(),其振幅是:
这是超越了弹性的振幅,当然,还是有一定的探讨意义的,同时它也证明了,在路表面运动振动函数的重要性!
当设计独立振动的系统的同时,其运行在临界函数表达为,它方便的表达SDOF系统的行为,独立体系效率胜于可变性。
其数量可以被定义为:
(3-48)
IE=1代表着完成独立接近于只有和IE=0代表着没有独立,其在才发生。
当函数低于临界函数的时候,大多数的运动都可能发生扩大;因此,通常独立振动只能发生在当系统处于临界函数大于的时候。
既然这样,这独立系统必须尽可能的有小的阻尼。
因为小的阻尼,其可变速性可以由公式.(3-44)或者(3-47)给出,取代公式.(3-24),其相近的关系可以表达为:
(3-49)
其独立事件效率因为:
(3-50)
为了解决它们之间的关系,包括了其相反形式
(3-51)
计算得
,g是重力加速度,是静态的挠度,由恒荷载W作用在弹性装置上,公式.(3-51)可以表达为下面这个公式:
频率由赫兹确定(周期秒),这个表达,来源于图示静态的挠度在图.3-14所示独立系统功率为不连续离散函数。
在了解其表达的频率激振后,可以直接确定其曲线如下面图3-14所示的,支持其挠度要求达到想达到的独立振动水平的功率(IE),当然,这个独立的振动系统还必须具有很少的阻尼。
还有这个独立振动系统,还必须有效的确保其具有弹性。
图3-14独立系统的设计表格
例子E3-3
往复性机械重达由我们熟悉的垂直导向函数推导来的,当其开动时振幅高达40HZ,。
为了限制其振动超过建筑的共振周期,所以这个设备必须要安装,它必须支持在每个转角处安装有直角弹性支座。
设计者想知道其支撑的强度,将被要求每个弹性力限制总的函数力从这个机械传递到另一个建筑是。
在这个例子里可传递性是协调各自独立的功率。
从图表.3-14可以知道和,可以求出来是;因此,必须要求其弹性限度内的抗挠性K为:
3-6估计粘性阻尼的比率
在前述中我们讨论到SDOF系统的动态反应,它已经假设了物体由大量的弹性支座组成,弹性限度内的抗挠性和粘性阻尼是被我们所知道的。
虽然在许多情况下,大量的和弹性限度内的抗挠性可以求得的,使用相当容易简单的物理情况去考虑的或者简单去表达,其讨论将在第八章中涉及。
其通常不容易确定其可行性的阻尼系数,因为在大多数实际的系统中机械机座的能量损耗很少被考虑到!
但事实上,可能实际机械能量损耗比简单的粘性的(与速度成比例),阻尼力已经被假设SDOF公式表示为平衡运动。
但是其通常可能使用试验的方法,进而近似的确定公式粘性阻力性质!
简单的解决方法通常被用于目前下列部位的用途:
自由振动能量损耗的方法
这是通常通过试验确定用在粘性阻尼比值最简单的和最常用的方法。
通过各种方法当系统被安置在一个自由振动时,当阻尼的比率可以由m连续的周期两个最高点确定。
如第八章所示,其阻尼的比率可以评价使用如下式:
(公式3-53)
公式里:
相当于对数经过M周期后减缩率和,各自分别为无阻尼和有阻尼周期循环。
对于阻尼比较小的数值,其大概的关系如公式(3-53)所示,当时其误差仅能为2%。
解决自由振动的主要方法是,其设备和所使用仪器的要求是最小的;其振动可以引进方便的方法和仅相对于位移振幅,必须先确定!
假如阻尼值如以前假定是精确地接近线性的粘性方式,一个连续的周期通过使用公式.(3-53)将产生相同的阻尼比率。
然而,其经常获得由振幅决定的阻尼的比率,例如,m为早期高振幅独立振动下连续周期的一部分反应,振幅比率在反应阶段的后期将产生不同较低的m周期连续性。
通常,其常出现在阻尼比率下降并伴随着各自自由振动的振幅。
注意通过振幅依靠阻尼的比率来预测其动力的反应。
图3-15
共鸣放大率的方法
这种方法是确定粘性阻尼比率在稳定状态下放大率最基本的测量方法,各自相对位移反应通过宽的范围包括一些自然的频率时,来自离散谐函数振幅下的荷载和在激振离散函数频率。
绘图器再次测量其频率时,提供一个频率反应曲线图表,如图.3-15所示。
从其频率反应最高点曲线表可以看出其典型的最小的阻尼,其结构相当狭小,在其最高点邻近通常必须缩短其不连续频率的间距,为了得到更好的变形曲线。
如公式.(3-32)和(3-33)所示,通常是动力扩大倍率的最大值并确定其激振频率和已经给定的;然而,由于其阻尼的函数在实际范围影响,可以使用其接近的关系。
其阻尼比率可以由下面试验数据得出:
(3-54)
确定其阻尼比率的的方法要求使用一个简单的试验仪器去确定频率的离散函数动力反应的扩大倍数和相当简单的动力荷载设备;从而,获得静力位移,现实的问题可能因为典型的谐函数荷载系统在零频率下产生荷载。
总的概括指出,现实的系统其阻尼频率对于振动依靠。
假如那样的话,其值包括公式.(3-54)依靠振动谐函数荷载适用于。
动力分析目的当详细说明其接近确切涵义时,这依赖必须考虑在内。
半功率和带宽法
从公式.(3-22)显然的可以看出,,频率灵敏度曲线如图.3-15所示形状,它由体系一定数量的阻尼控制;因此,其尽可能的从许多不同的物体的曲线中导出阻尼比率,最便利的方法是半功率法和带宽法,通过频率可以确定其阻尼比率,反应的振幅减少至其的倍,其最高值是:
起决定性作用的频率关系是通过公式.(3-22)获得稳定的振幅相等的倍,其最高值通过公式.(3-33)求得,所以,通过设置:
(3-55)
用方格法放大图画使两边的相等和解决作为二次方程式的结果可由下式得出:
(3-56)
对于阻尼的最小值在实际中还是比较有探讨意义的,其屈曲时的频率比率为:
减去,如下:
(3-58)
加,如下:
(3-59)
结合公式.(3-58)和公式.(3-59)
(3-56)
式中和都是频率在振幅反应相等倍的情况下振幅最大值。
不管使用公式.(3-58)还是公式.(3-60)在图3-15估计其阻尼的比率,水平直线已经通过了曲线在倍最高值的函数。
显然,这种方法包括阻尼比率,避免了包含其静位移;然而,其不要求其振幅反应曲线包含精确的最高点和在处。
为了阐明上述几种方法,通常使用半功率法,通过施加荷载认为平均时间能量并加以规定,由阻尼力引起的,必须均等协调其能量的比率。
在振幅为稳定的状态下谐函数使达到要求的情况,其位移反应振幅是,当其平均能量的比值分散是:
(3-61)
其表达的是能量平均合理协调的到;因此,当,当能量平均输入振幅比率和,
(3-62)
是由公式.(3-32).当能量平均输入比半功率法比带宽法输入的少,比平均能量法输入多得多,这两种方法平均数值平均
例E3-4.从SDOF试验曲线频率反应数据摘要的来自图示.E3-2.如图所示有关的数据来自阻尼比率的评测,由曲线图表分析的每一步顺序,如图示的:
(1)确定其反应的最高点
 升级会员
升级会员 