考试第34章习题参考答案docx.docx
《考试第34章习题参考答案docx.docx》由会员分享,可在线阅读,更多相关《考试第34章习题参考答案docx.docx(21页珍藏版)》请在冰豆网上搜索。
考试第34章习题参考答案docx
第3章
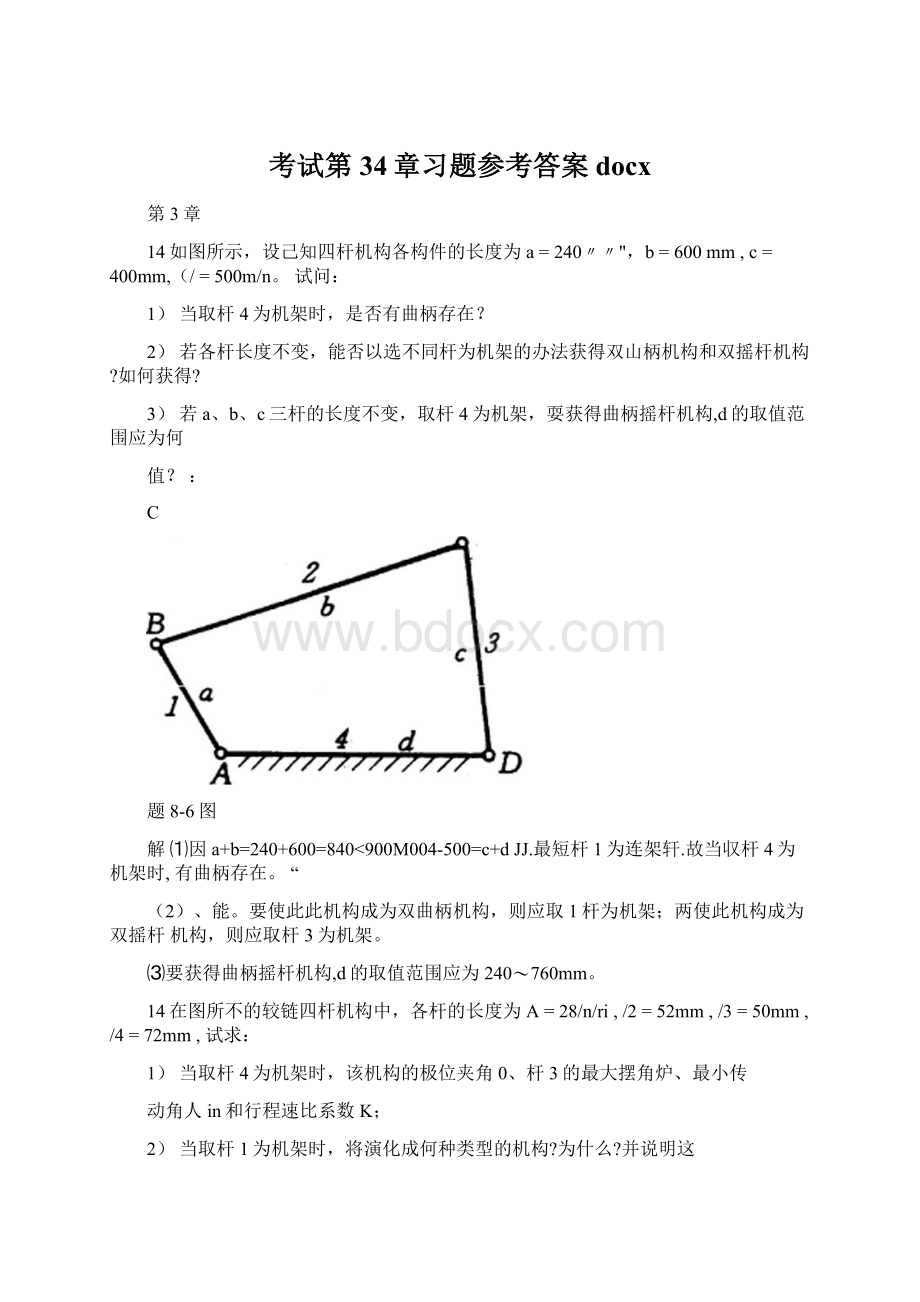
14如图所示,设己知四杆机构各构件的长度为a=240〃〃",b=600mm,c=400mm,(/=500m/n。
试问:
1)当取杆4为机架时,是否有曲柄存在?
2)若各杆长度不变,能否以选不同杆为机架的办法获得双山柄机构和双摇杆机构?
如何获得?
3)若a、b、c三杆的长度不变,取杆4为机架,耍获得曲柄摇杆机构,d的取值范围应为何
值?
:
C
题8-6图
解⑴因a+b=240+600=840<900M004-500=c+dJJ.最短杆1为连架轩.故当収杆4为机架时,有曲柄存在。
“
(2)、能。
要使此此机构成为双曲柄机构,则应取1杆为机架;两使此机构成为双摇杆机构,则应取杆3为机架。
⑶要获得曲柄摇杆机构,d的取值范围应为240〜760mm。
14在图所不的较链四杆机构中,各杆的长度为A=28/n/ri,/2=52mm,/3=50mm,/4=72mm,试求:
1)当取杆4为机架时,该机构的极位夹角0、杆3的最大摆角炉、最小传
动角人in和行程速比系数K;
2)当取杆1为机架时,将演化成何种类型的机构?
为什么?
并说明这
时C、D两个转动副是周转副还是摆转副;
3)当取杆3为机架时,乂将演化成何种机构?
这时A、B两个转动副是否仍为周转副?
解
(1)柞出机构的两个极位,如图,并市图屮量得:
0=18.6°,4)=70.6°,Ymin=22.7°
=12.3
180°+^_180°+18.60
"180°-^"180°-18.6°
(2)①由28+72<52+50可知图示较链四杆机构各杆长度符合杆长条件;小②最短杆1为机架时,该机构将演化成双]11|柄机构;③最短杆1参与构成的转动副A、B都是周转副而C、D为摆转副;
(3)当取杆3为机架时,最戒杆变为连杆,又将演化成双摇杆机构,此时A、B仍为周转副。
31设计一曲柄滑块机构,设已知滑块的行程速度变化系数K=l.5,滑块的冲程H=50mm,偏距e=20mm。
并求其最人压力角a加乂。
k-]15-1
解:
计算&=18(7—=18(T上1=36°并取相应比例尺『根据滑块的行程H作出极位£+11.5+1
及作o圆,作偏距线,两者的交点即饺链所在的位置,由图可得:
】ab=口I.(AC2・AC[)/2=17mm,1bc=口i・(AC2+AC1)/2=36mm
16
试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上)
(a)
(b)
参考答案:
参考答案:
参考答案:
17.在图示的四杆机构1+1,LAB=60mm,LCD=90mm,LAD=LBC=120mm,o)2=10rad/s,试丿IJ瞬心法求:
1)当4)=165°时,点的速度vc;
2)当
(1)=165°时,构件3的BC线上速度最小的一点E的位置及速度的人小;
3)当Vc=0时,4)角之值(有两个解)。
参考答案:
1)以逸定的比侥尺丹作机构运动简图(图b).
(2分)
(3分)
2)求%定出瞬心P仃的位置(图6)
因斥3为构席3旳地戈丸昇心、,刃有心二叭/t8P沪必Iab/山丽3
二2决0矶灯8g
=£36md/s)
%=儿Cpf3叭=033x82心「二04吩)
3〉定出构件3的EC线上連度最
小的点E的位匱
牡=/4融代如x“C2〃=C好7(必丿
因3匕线上建度長点理与7?
头点的眸离最疋.故"①利处戏刃麦疣交孑、点、E,由也可将
20在图示的摇块机构中,己知lAB=30miTi,lAC=100mm,1Bd=50mm,lDE=40mm,曲柄以等角速度3尸40rad/S冋转,试用图解法求机构在4)尸45。
位置时,点D及E的速度和加速度,以及构件2的角速度和角加速度。
解⑴以口]作机构运动简图⑻所示。
(2)速度分析:
以C为重合点,有
Vc2=Vb+Vc2B=%3+Vc2C3
人小?
3|Iab?
0'
方向?
=AB丄BC//BC
以「作速度多边形图(b),再根据速度影像原理,作厶bde-/ABDE求得d及e,由图可得
VD=U、pd=O.23m/s
ve=Uvpe=O.173m/sw2=Pvbs/lBc=2rad/s(顺时针)
(3)加速度分析:
以C为重合点,有
+a°C2B+a‘C2B=ac3+aC2C3+a「C2C33221bC?
0233VC2C3?
c—B丄BC丄BC//BC
ac2=大小3121aB
方向B—A
H•屮(C2B=32?
1bC=0.49m/S2>a*c2C3=233Vc2C3=0.7m/S?
以Ua作加速度多边形如图(c)
所示,由图可得
aD=PaPd=064m/S2
aE=uap'e'=2.8m/s2
a2=a;2B/lBc=卩an'2C'2/lBC=&36rad/s2(顺时针)22在图(a)示的机构中,已知1AE=70mm,;lAB=40mm,lEF=60mm,
1de==35mm,lcD=75mm」BC=50mm.原动件以等角速度i=10rad/s回转.试以图解法求机构在4)i=50o位迸时.点C的速度乂和加速度叽
解:
1)速度分析:
以F为重合点.有
Vf4=Vf5=Vf]+VF5f1
以U1作速度多边形图如图(b)得,滋伍)点,再利用速度影像求得b及d点
继续作速度图,矢量pc就代表了Vc
af4=a"F4+a;4=afi+a*F5F1+a「fsfi
(c),得g)点,再利用加速度影像求得b、及<T点
根据ac=aB+ancB+a,cB=aD+ancD+aICD
继续作图,则矢量P'c'就代表了ac・则求得vc=Uvpc=0.69m/s
ac=Mapc=3m/s2
26图示为一实验用小电炉的炉门装置,关闭时为位置E],开启时为位置E2。
试设计一个四杆机构来操作炉门的启闭(各有关尺寸见图)。
(开启吋,炉门应向外开启,炉门与炉体不得发生干涉。
而关闭时,炉门应冇一个自动压向炉体的趋势(图中S为炉门质心位置)。
B、C为两活动较链所在位置。
解⑴作出B2C2的位置;用作图法求出A及D的位置,并作出机构在E2位置的运动简图,见下图,并从图中量得
1ab=卩i・AB=95mm
1ad=»i.AD=335mm
1cd=U|.CD=290mm
(2)用柞图法在炉门上求得B及C点位置,并作出机构在位置的运动图(保留作图线)。
作图时将位咼E1转至位置E2,见图并量得
1ab=卩i,AB=92.5mm
1bc=口iBC=127.5mm
1cd=U|.CD=262.5mn
29图示为一已知的曲柄摇杆机构,现耍求用一连杆将摇杆CD和滑块F联接起来,使摇杆的三个己知位置CQ、C,D、C旧和滑块的三个位置仟、厲、佗相对应(图示尺寸系按比例绘出)。
试确定此连杆的长度及其与摇杆CD饺接点的位置。
解由题意知,木题实际是为按两连架汗(摇杆打滑块)的预定对应位置设计四打机构的同题。
具体作图过程如下图所示。
连杆的长度为1ef=»iE2F2=130mm。
30如图所示,现欲设计一饺链四杆机构,设已知摇杆CD的长lCD=75mm行程速比系数K=1.5,机架AD的长度为口严100皿“,摇杆的一个极限位置与机架间的夹角为肖=45。
,试求曲柄的长度lAB和连杆的长度lBC(有两组解)。
*一115-1
解:
先计算0=180°-—=180°——=36°
k+\1.5+1
再以相应比例尺孔作图可得两个解:
(1)1ab=p1.(AC2・ACJ/2=49.5mm,1bc=»i・(AC?
+AC])/2=119.5mm
(2)1Ab=Ui.(ACrAC2)/2=22mm,1bc=Ui-(AC2+AC1)/2=48mm
36如图所示,设要求四杆机构两连架杆的三组对应位置分别为8严35。
,©=50。
勺=80。
02=75。
,a、=125°,仍=105。
。
试以解析法设计此四杆机构。
cos35=Pocos50+p}cos(50-35)+p2得cos125=Pqcos105°+pxcos(105°-125)+p2
解之得(计算到小数点后四位)p0=1.5815,P1=-1.2637,p2=1.0233
(2)如图所示,求各杆的相对长度,得n=c/a=po=1.5815,l=-n/p=1.2515
m=J/2+h2+1-2//?
2=1.5831
(3)求各杆的长度:
得480.00
a=d/l=80/1.2515=63.923mm
b=ma=1.5831x63.923=101.197mm
c=na=l.5851x63.923=101.094nun
第4章
6在题4-1图中凸轮为半径为R的圆盘,凸轮为主动件。
(1)写出机构的压力角a与凸轮转角之间的关系;
(2)讨论如果a>[a],应采用什么改进设计的措施?
解:
(1)、当凸轮转动任意角5时,其压力角oc如图所示。
由图中几何关系有
所以机构的压力角a与凸轮转角5Z间的关系为
•,e-ecos3xa=arcsin()
/?
+rz
(2)、如果oc>[a],则应减小偏距e,增大圆盘半径斤和滚子半径加
9-6在图示机构中,哪个是止偏置?
哪个是负偏置?
根据式(9・24)说明偏置方向对凸伦机构压力角有何影响?
题9-6图
答由凸伦的凹转中心作推杆轴线的垂线•得垂足点,若凸轮在垂足点的
速度沿推杆的推程方向•刚凸轮机构为正偏置.反之为负偏置。
由此可知.在图示机沟中,两个均为正偏置。
由
ds!
dS^e
tancr二
-0?
)+S
可知.在其他条件不变的情况下。
若为正偏置(e前取减号).由于推程时(ds/d§)为正.式中分子ds/d6-e而回程时,由于ds/d6为负,式中分子为|(ds/d5)-e|=|(ds/dS)|4-|e|>ds/dSo故压力角增大。
负偏置时刚相反,即.正偏置会使推程压力角减小,回程压力角增人;负偏置会使推程压力角增人,回程压力角减小。
9-7试标出题9-6a图在图示位置吋凸轮机构的压力角,凸轮从图示位置转过90。
后推杆的位移;并标岀题9-6b图推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。
解如图(a)所示,用肓线连接圆盘凸伦圆心A和滚了屮心B,则直线AB与推杆导路之间所夹的锐角为图示位査时凸轮机构的压力角。
以A为圆心,AB为半径作圆,得凸轮的理论丿郭线圆。
连接A少凸轮的转动中心O并延长,交于凸轮的理论廓线于C点。
以O为圆心.以OC为半径作闘得凸轮的棊闘。
以O为闘心,以O点到推杆导路的距离OD为半径作闘得推杆的偏距圆;。
延长推杆导路线交基圆于G■点,以直线连接OG。
过O点作OG的垂线,交基圆于E点。
过E点在偏距圆的下侧作切线.切点为H点.交理论廓线于F点,则线段EF的长即为凸轮从图示位置转过90后推杆的位移So
方法同前,在图(b)中分別作出凸轮的理论廓线、基圆、推杆的偏距圆。
延长推杆导路线交基圆于G点,以直线连接0G。
以0为圆心,以滚子中心升高s后滚子的转动中心K到0点的距离0K为半径作圆弧,交理论廓线于F点。
过F点作偏距圆的切线,交基圆于E点,切点为H。
则ZG0E为推杆从图示位置升高位移s时■凸轮的转角,ZAFH为此时凸轮机构的压力角。
9—8在图示凸轮机构屮,圆弧底摆动推杆与□轮在B点接触。
当凸轮从图示位置逆时针转过90。
时,试用图解法标出:
1)推杆在凸轮上的接触点;
2)摆杆位移角的大小;
3)凸轮机构的压力角。
解如图所示,以0为圆心,以0点到推杆转动中心A的距离A0为半径作圆,得推杆转动中心反转位置圆。
过0点忤0A的垂线,交推杆转动中心反转位置圆于D点。
以0'为圆心.以0'点到推杆圆弧圆心C的距离C0'为半径作圆.得凸轮的理论廓线。
以0为圆心,作圆内切于凸轮的理论廓线圆,得凸轮的基圆。
以D为圆心,以AC为半径作圆弧,交凸轮的理论廓线于E点,交凸轮的圆于G点。
用直线连接E0',交凸轮的实际廓线于F点,此即为推杆在凸轮上的接触点;而ZGDE即为摆杆的位移角;过E点并垂直于DE的总线与直线EF间所夹的锐角即为此吋凸轮机构的压力角。
25.补全题30图不完整的从动件位移、速度和加速度线图,并判断哪些位置有刚性冲击,
题30图
哪些位置有柔性冲击。
解:
补全后的从动件位移、速度和加速度线图如上右图所示。
在运动的开始时点(),以及龙/3、4龙/3、5兀/3处加速度有限突变,所以在这些位置有柔性冲击;在2龙/3和龙处速度有限突变,加速度无限突变,在理论上将会产生无穷大的惯性力,所以在这些位置有刚性冲击。
26.在题31图中所示的摆动滚了从动件盘形凸轮机构中,己知摆杆AB在起始位置时垂直于OB,lOB=40mm,lAB=80/nm,滚了半径匚=10加加,凸轮以等角速度
co逆时针转动。
从动件的运动规律是:
凸伦转过180°,从动件以正弦加速度运动规律
向上摆动30°;凸轮再转过150°吋,从动件以等加速等减速运动运动规律返冋原来位
6
置;凸伦转过其余3(r时,从动件停歇不动。
试写出凸伦理论廓线和实际廓线的方程式。
解:
摆杆的最大摆角为30。
,推程为180%回程为150°,远休止角为0。
,近休止角
为30。
,确定从动件的运动规律为》1・
sin(—)
1802龙2J。
=30一乍詈(5—180)20=乍誥[150一0一180)]20=0
建立直角坐标系,将坐标原点选在点O,x轴沿OA方向,如上右图所示。
ini轮的革圆半径乙=1()b=40/nm;
l0A=Jab,+.J=7802+402=89.44/?
7/?
?
:
由上图小的儿何关系可以写出
OB、
l()A-,ABCOS@)+(P)
-Iabsin(0°+0)
OB2=[R_^
所以凸轮理论轮廓线的方程式为
cos»
sin5
loA~lABCOS(0o+0)「
-sin3
cos»
Tabsin(0o+/)
由于滚子半径©=1Qmm,所以凸轮实际轮廓线的方程式为
dxidS
f
^dyjdSy+(dxid§y
专业好文档精心整理欢迎卜•载
 升级会员
升级会员 