基于颜色编码三维测量的数字图像处理.docx
《基于颜色编码三维测量的数字图像处理.docx》由会员分享,可在线阅读,更多相关《基于颜色编码三维测量的数字图像处理.docx(17页珍藏版)》请在冰豆网上搜索。
基于颜色编码三维测量的数字图像处理
一.颜色编码
利用条纹的颜色实现编码就是颜色编码法。
颜色编码法是空间编码法的一种。
基于由三色学说建立的RGB模型,确定了一种彩色条纹组合编码的方法。
用作颜色编码的颜色代码可分为反射色和发光色两种。
反射色编码必须在一定的照明条件下使用。
如果只变换颜色的色调,一般只限于九种颜色,但如果与色调、明度、饱和度相配合,则可多达二十多种颜色。
其中红、橙、黄、绿,蓝、紫等基本色是颜色编码中最常用的颜色代码。
与其他编码方式相比,颜色编码所需的空间小,在搜寻,计数以及定性判断作业中使用效果较好。
但颜色编码易受照明条件影响,而且不适用于有色觉缺陷的人。
在设计和使用颜色编码时要考虑照明环境,颜色亮度、色码大小和观察距离等因素。
彩色编码原理颜色编码策略有很多种,各有优缺点。
好的编码策略应该具有长的周期和较强的抗干扰能力。
用彩色摄像机获得的图像中,红、绿、蓝3种颜色相互独立,称为三原色。
为了使测量系统具有一定的抗干扰能力,尽量使每一种颜色之间的差别达到最大。
因此红绿蓝3种颜色每种只取0和255两个值。
这时用3种颜色进行组合,可以得到白、红、绿、蓝以及它们的补色黑、青、品、黄。
如果用黑色做底色,为了减少色彩之间的相互干扰,底色条纹与彩色条纹的宽度比取2。
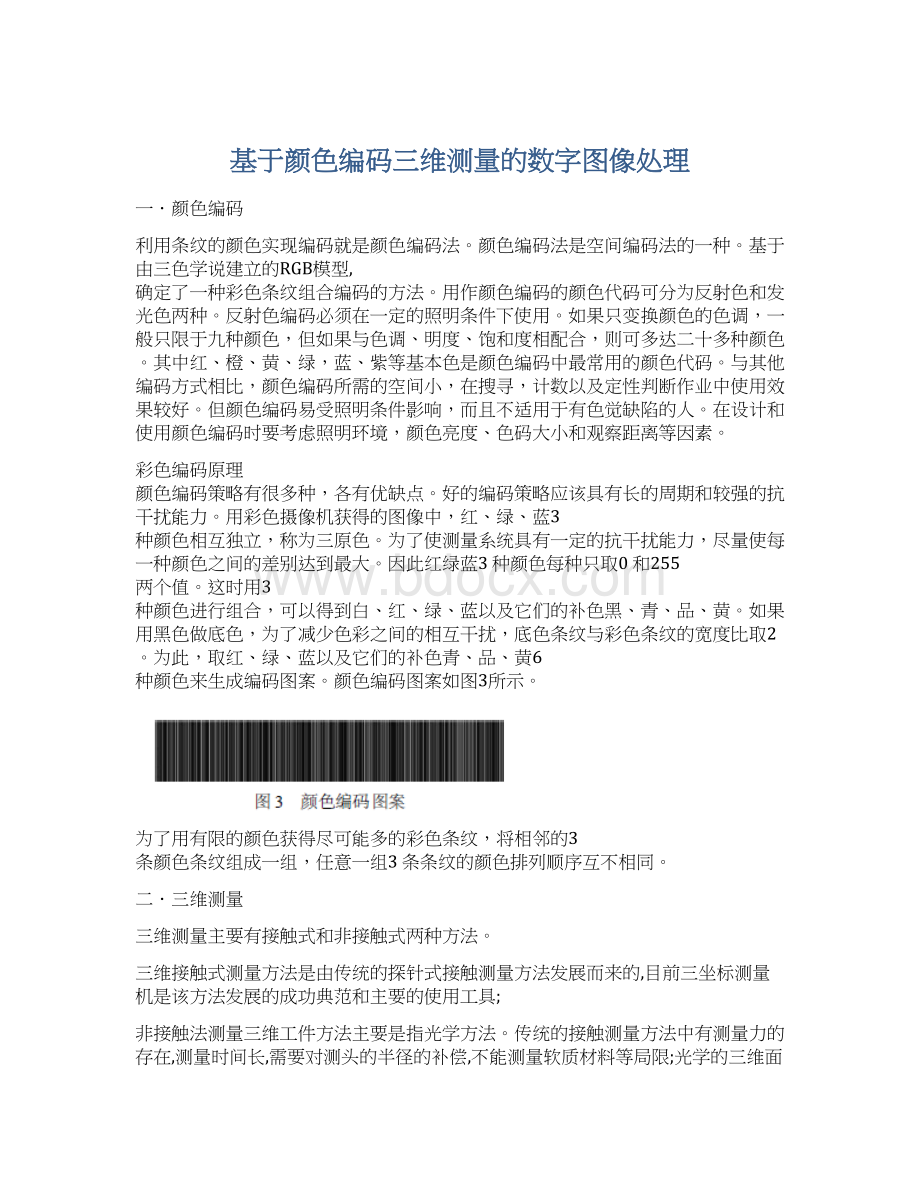
为此,取红、绿、蓝以及它们的补色青、品、黄6种颜色来生成编码图案。
颜色编码图案如图3所示。
为了用有限的颜色获得尽可能多的彩色条纹,将相邻的3条颜色条纹组成一组,任意一组3条条纹的颜色排列顺序互不相同。
二.三维测量
三维测量主要有接触式和非接触式两种方法。
三维接触式测量方法是由传统的探针式接触测量方法发展而来的,目前三坐标测量机是该方法发展的成功典范和主要的使用工具;
非接触法测量三维工件方法主要是指光学方法。
传统的接触测量方法中有测量力的存在,测量时间长,需要对测头的半径的补偿,不能测量软质材料等局限;光学的三维面形检测,由于其非接触、高准确度、易于自动控制等优点,日益受到人们的重视。
现有的方法包括莫尔条纹法、傅里叶变换轮廓术、位相测量轮廓术、光学三角测量法等。
1.基于小波变换的三维测量方法
一种新的基于小波变换的三维测量方法。
其主要目的在于精确得求解出条纹图像的相位分布,由相位分布得到物体的三维形貌信息。
其实现步骤为:
将一幅黑白正弦条纹图像投影到被测物体上。
对CCD采集到的变形条纹图像逐行进行小波变换,通过检测小波脊线求解相对相位分布,同时记录小波脊线位置的小波变换尺度因子建立质量图。
根据质量图将相对相位分布分成可靠性高低的两个部分,可靠性高的部分采用扫描线算法直接进行相位展开,可靠性低的部分根据质量图指导,采用洪水算法相位展开,得到条纹图像的绝对相位分布。
根据相位高度转换公式由绝对相位分布获取被测物体的三维信息本文方法误差范围是-2.5~O.5rad
2.基于PSD的三维测量方法
.一种基于PSD的三维测量方法,其特征在于:
使用由线阵PSD配合柱面镜头构成相机装置观测空间目标点P,得到空间点P在PSD相机的投影点u的位置信号。
该位置信号可以唯一定义一个空间测量平面;当多个PSD相机同时使用时,由单一空间点P所获得的多个投影点u可以定义同样多个测量面;这些面非平行,其交点就是该空间点P;在这些平面方程可以确定的条件下,则该空间点P的位置可以由所述平面定义的坐标系下计算出来;为实现上述三维定位,要先对所使用PSD相机进行标定,获得参考坐标系与PSD投影点u的位置关系,当相机标定完成之后,再进行三维定位计算
3.莫尔条纹法
提出了以计算机控制光栅产生莫尔条纹来测量物体三维形貌的新方法。
利用计算机控制空间光调制器(spacelightmodulator.slm)产生可控制幅度及位相的理想光栅,将平行光波投影到待测物体上。
其反射光通过参考光栅形成莫尔条纹,利用ccd接受并进行数字图像处理,恢复出待测物体的三维形貌,对此方法进行了理论分析,推导出变形莫尔条纹与待测物形貌变化的关系式。
利用MATLAB对此关系式进行仿真计算,其准确度可达0.011um
理论分析了变形莫尔条纹与待测物形貌裱花的关系,利用MATLAB对此关系式进行仿真计算,仿真计算的准确度可达0.011um,证实此方法是可行的。
4光学三维测量法
光学三维测量法分为相移测量法,傅里叶轮廓术,相位测量轮廓术
相移测量法是一种重要的三维测量方法,它采用正弦光栅投影和相移技术,投影在物体上的光栅,根据物体的高度而产生变形,变形的光栅图像叫做条纹图,它包含了三维信息。
相移法有多种方案,出现较早的N步法将投影到物体表面的正弦光栅条纹移动N次,每次移动的相位值为2N/(N+1),从而得到N+1幅图像。
除此之外还有N段积分法,N+1步法,最小二乘法,Carre相移法等。
相移法的有点事一种在时间轴上的逐点运算,不会造成全面影响,计算量少。
另外,这种方法具有一定抗静态噪声的能力。
缺点是不能消除条纹中高频噪声引起的误差。
再传统相移系统中,精确移动光栅的需要增加了系统的复杂性。
而在数字相移系统中,用软件控制精确的实现相位移动。
某些应用场合不允许测量多幅图像,但只要没有以上限制,相移法仍是首选。
由于测量系统的像差效应,透镜的畸变效应,CCD的非线性效应及图像采集板的量化效应等,都会给相移测量法带来很复杂的非线性系统误差,这些因素都降低了相移测量的测量精度。
傅里叶轮廓术(FTP)
傅里叶变换在信息光学中的作用和地位是大家所熟悉的,1983年M.Takeda和K.Muloh将傅里叶变换用于三维物体面形测量,提出傅里叶变换轮廓术(Fouriertransformprofilomctry,简称FTP)0,2936翊。
该方法是将一维快速傅里叶变换用于结构光场三维面形测量,在初期,该方法通过投影系统将Ronchi光栅或正弦型光栅投影到彼测物体表面,摄像系统获取被物体高度分布调制的变形条纹。
并由图像采集系统将变形条纹送入计算机进行快速傅里叶变换,滤波和逆傅里叶变换,求解出物体的高度信息。
l,系统框图如图l一3所示。
与PMP中处理的变形条纹一样,如式(1.1),变形条纹的傅里叶变换频谱分布可表示
其中A(f,y)和Q(f,y)力分别表示a(x,y)和
的傅里叶变换。
通过从频域中滤出基频分量并进行逆傅里叶变换可以计算出相位的分布,表示
相位测量轮廓术(PMP)
相位测量轮廓术[26-291(PhaseMeasurementProfilometry,简称PMP),是众多的三维测量方法中的一种,由激光于涉计量发展而来,图1-2是一种采用发散照明的PMP方法的光路图。
PMP的基本思想就是将正弦光栅投影到三维待测的漫反射物体表面,从成像系统中获取变形的光栅像;然后采用相移的方法得到多帧变形的条纹图,通过这些变形条纹图可以精确地计算物体上每一点由于高度变化引起的相位分布的变化,最后通过相位展开算法可精确地得到物体三维面形数据
采用结构光照明方式,当一个正弦光栅被投影N--维漫反射物体表面时,从成像系统获取的变形光栅像可以用下式表示:
其中a(x,y)是背景光场,b(x,y)力是物面非均匀反射率,a(x,y)/b(x,y)是条纹的对比度,
是由物体高度分布h(x,y)引起的相位调制,f0矗是投影光栅的基频
5彩色编码三维测量原理
测量系统由数字投影仪DLP(DigitalLightProcessing)[5]和彩色摄像机以及计算机组成。
计算机
用软件产生颜色编码图案,送到DLP上。
DLP将颜色编码图案投射到被测三维物体上,由彩色摄像机摄取图像
彩色编码原理
颜色编码策略有很多种,各有优缺点。
好的编码策略应该具有长的周期和较强的抗干扰能力。
用彩色摄像机获得的图像中,红、绿、蓝3种颜色相互独立,称为三原色。
为了使测量系统具有一定的抗干扰能力,尽量使每一种颜色之间的差别达到最大。
因此红绿蓝3种颜色每种只取0和255两个值。
这时用3种颜色进行组合,可以得到白、红、绿、蓝以及它们的补色黑、青、品、黄。
如果用黑色做底色,为了减少色彩之间的相互干扰,底色条纹与彩色条纹的宽度比取2。
为此,取红、绿、蓝以及它们的补色青、品、黄6种颜色来生成编码图案。
颜色编码图案如图3所示。
为了用有限的颜色获得尽可能多的彩色条纹,将相邻的3条颜色条纹组成一组,任意一组3条条纹的颜色排列顺序互不相同
解码原理
图像传感器获取被物体调制的编码图案,送到计算机中对图像进行处理,可以得出像面上任意一点像素的颜色。
根据这点所在条纹颜色以及这条条纹相邻两条纹颜色就可以确定该点所在条纹的位置。
每条条纹的编码值唯一地对应于一个投影角,根据测量原理,按公式
(1)、
(2)和(3)就可以求出该点的三维坐标
确定了图像上各个条纹的位置,就可以确定对于可测空间内被测景物上一切可测点的投射角α。
在测量系统中,条纹的位置是从第一条条纹开始顺序编号的。
如图4所示,为投影仪在XO1Y平面上的投影若投影系统在XO1Y平面上的视场角为2α1,其
光轴与O1X轴夹角为α0,编码图案条纹总数为T,则像面上对应编码图案上第t条条纹的投射角α为:
α=α0+α12α1t/T(4)
根据系统数学模型,将投射角α代入公式
(1)、
(2)和(3)即可计算出可测点的三维坐标。
优点:
采用颜色编码技术只需拍摄一幅图像就可以实现物体的三维测量,与点扫描和线扫描结构光法相比数据量少,速度快,可以实现在线检测。
这种编码方法用6种颜色的彩色条纹按着任意相邻的3个条纹的颜色排列都是唯一的原则相互组合,生成空间周期为213条条纹的编码图案,空间周期远大于其他编码方案。
彩色条纹只用RGB分量的0和255上下两个极限值,增加了条纹的抗干扰能力,且解码比较容易实现。
利用标志特征点,对大型物体表面进行分块测量,结合边缘检测技术以及圆心检测技术确定分割线,对物体的三维坐标进行分割、剪切与拼接,实现了大型物体三维测量。
三.数字图像处理
数字图像处理是通过计算机对图像进行去除噪声、增强、复原、分割、提取特征等处理的方法和技术。
数字图像处理的产生和迅速发展主要受三个因素的影响:
一是计算机的发展;二是数学的发展(特别是离散数学理论的创立和完善);三是广泛的农牧业、林业、环境、军事、工业和医学等方面的应用需求的增长。
主要内容
数字图像处理主要研究的内容有以下几个方面:
1)图像变换由于图像阵列很大,直接在空间域中进行处理,涉及计算量很大。
因此,往往采用各种图像变换的方法,如傅立叶变换、沃尔什变换、离散余弦变换等间接处理技术,将空间域的处理转换为变换域处理,不仅可减少计算量,而且可获得更有效的处理(如傅立叶变换可在频域中进行数字滤波处理)。
目前新兴研究的小波变换在时域和频域中都具有良好的局部化特性,它在图像处理中也有着广泛而有效的应用。
2)图像编码压缩图像编码压缩技术可减少描述图像的数据量(即比特数),以便节省图像传输、处理时间和减少所占用的存储器容量。
压缩可以在不失真的前提下获得,也可以在允许的失真条件下进行。
编码是压缩技术中最重要的方法,它在图像处理技术中是发展最早且比较成熟的技术。
3)图像增强和复原图像增强和复原的目的是为了提高图像的质量,如去除噪声,提高图像的清晰度等。
图像增强不考虑图像降质的原因,突出图像中所感兴趣的部分。
如强化图像高频分量,可使图像中物体轮廓清晰,细节明显;如强化低频分量可减少图像中噪声影响。
图像复原要求对图像降质的原因有一定的了解,一般讲应根据降质过程建立"降质模型",再采用某种滤波方法,恢复或重建原来的图像。
4)图像分割图像分割是数字图像处理中的关键技术之一。
图像分割是将图像中有意义的特征部分提取出来,其有意义的特征有图像中的边缘、区域等,这是进一步进行图像识别、分析和理解的基础。
虽然目前已研究出不少边缘提取、区域分割的方法,但还没有一种普遍适用于各种图像的有效方
 升级会员
升级会员 