机械设计基础第二版题解.docx
《机械设计基础第二版题解.docx》由会员分享,可在线阅读,更多相关《机械设计基础第二版题解.docx(55页珍藏版)》请在冰豆网上搜索。
机械设计基础第二版题解
机械设计基础第二版(陈晓南_杨培林)题解
课后答案完整版
从自由度,凸轮,齿轮,v带,到轴,轴承
第三章部分题解
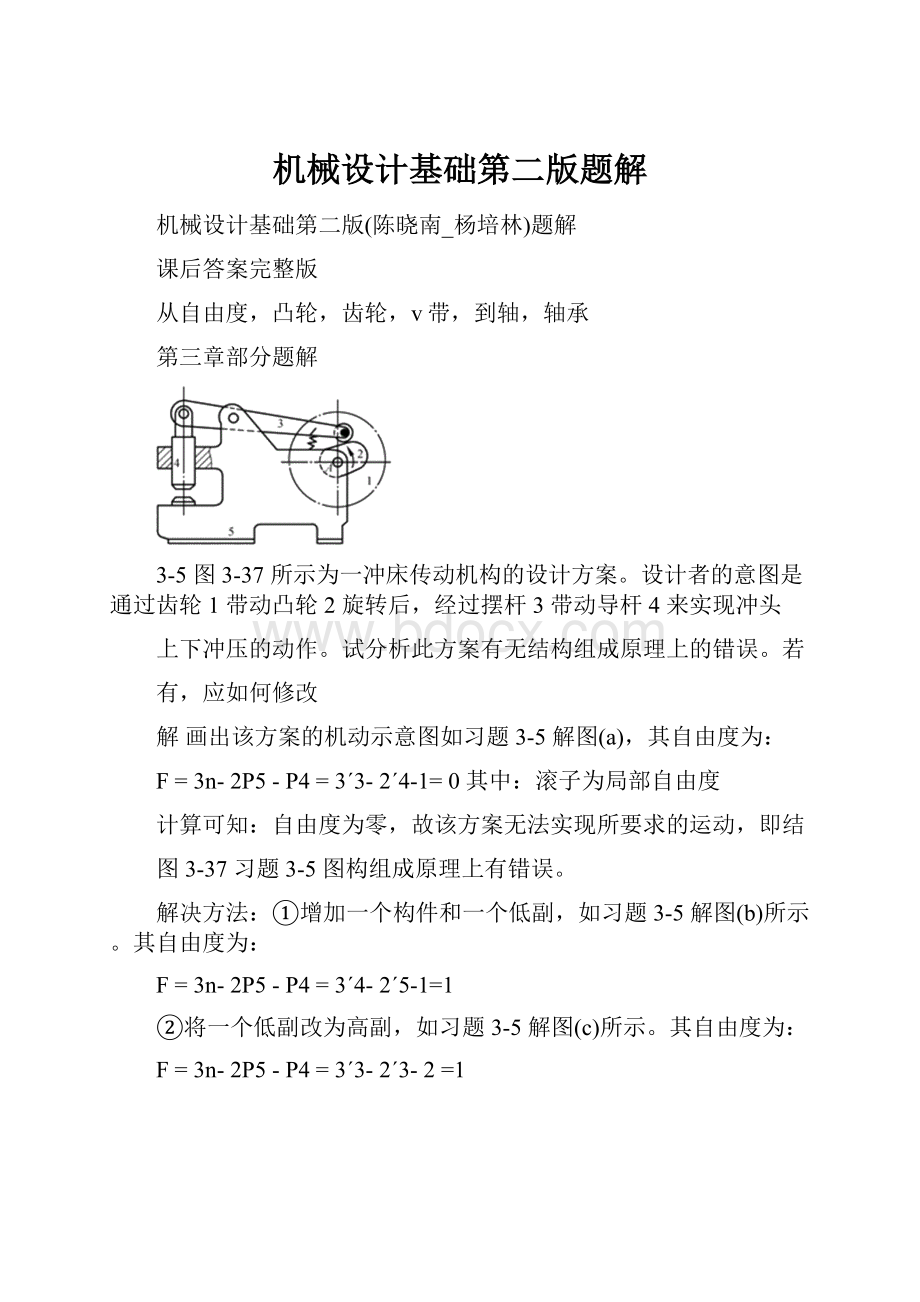
3-5图3-37所示为一冲床传动机构的设计方案。
设计者的意图是通过齿轮1带动凸轮2旋转后,经过摆杆3带动导杆4来实现冲头
上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若
有,应如何修改
解画出该方案的机动示意图如习题3-5解图(a),其自由度为:
F=3n-2P5-P4=3´3-2´4-1=0其中:
滚子为局部自由度
计算可知:
自由度为零,故该方案无法实现所要求的运动,即结
图3-37习题3-5图构组成原理上有错误。
解决方法:
①增加一个构件和一个低副,如习题3-5解图(b)所示。
其自由度为:
F=3n-2P5-P4=3´4-2´5-1=1
②将一个低副改为高副,如习题3-5解图(c)所示。
其自由度为:
F=3n-2P5-P4=3´3-2´3-2=1
习题3-5解图(a)习题3-5解图(b)习题3-5解图(c)
3-6画出图3-38所示机构的运动简图(运动尺寸由图上量取),并计算其自由度。
(a)机构模型(d)机构模型图3-38习题3-6图
解(a)习题3-6(a)图所示机构的运动简图可画成习题3-6(a)解图(a)或习题3-6(a)解图(b)的两种形式。
计算该机构自由度为:
F=3n-2P5-P4=3´3-2´4-0=1
习题3-6(a)解图(a)习题3-6(a)解图(b)
解(d)习题3-6(d)图所示机构的运动简图可画成习题3-6(d)解图(a)、习题3-6(d)解图(b)、习题3-6(d)解图(c)等多种形式。
-1-
计算该机构自由度为:
F=3n-2P5-P4=3´3-2´4-0=1
习题3-6(d)解图(a)习题3-6(d)解图(b)习题3-6(d)解图(c)
3-7计算图3-39所示机构的自由度,并说明各机构应有的原动件数目。
解(a)F=3n-2P5-P4=3´7-2´10-0=1
A、B、C、D为复合铰链
原动件数目应为1
说明:
该机构为精确直线机构。
当满足BE=BC=CD=DE,AB=AD,
AF=CF条件时,E点轨迹是精确直线,其轨迹垂直于机架连心线AF
解(b)F=3n-2P5-P4=3´5-2´7-0=1
B为复合铰链,移动副E、F中有一个是虚约束原动件数目应为1
说明:
该机构为飞剪机构,即在物体的运动过程中将其剪切。
剪切时剪刀的水平运动速度与被剪物体的水平运动速度相等,以防止较厚的被剪物体的压缩或拉伸。
解(c)方法一:
将△FHI看作一个构件
F=3n-2P5-P4=3´10-2´14-0=2
B、C为复合铰链原动件数目应为2
方法二:
将FI、FH、HI看作为三个独立的构件
F=3n-2P5-P4=3´12-2´17-0=2
B、C、F、H、I为复合铰链
原动件数目应为2
说明:
该机构为剪板机机构,两个剪刀刀口安装在两个滑块上,主动件分别为构件AB和DE。
剪切时仅有一个主动件运动,用于控制两滑块的剪切运动。
而另一个主动件则用于控制剪刀的开口度,以适应不同厚度的物体。
解(d)F=(3-1)n-(2-1)P5=(3-1)´3-(2-1)´5=1
原动件数目应为1
说明:
该机构为全移动副机构(楔块机构),其公共约束数为1,即所有构件均受到不能绕垂直于图面轴线转动的约束。
解(e)F=3n-2P5-P4=3´3-2´3-0=3原动件数目应为3
说明:
该机构为机械手机构,机械手头部装有弹簧夹手,以便夹取物体。
三个构件分别由三个独立的电动机驱动,以满足弹簧夹手的位姿要求。
弹簧夹手与构件3在机构运动时无相对运动,故应为同一构件。
2
3-10找出图3-42所示机构在图示位置时的所有瞬心。
若已知构件1的角速度w1,试求图中机构所示位置时构件3的速度或角速度(用表达式表示)。
解(a)v3=vP13=w1lP13P14(←)解(b)v3=vP13=w1lP13P14(↓)
解(c)∵vP13=w1lP13P14=w3lP13P34(↑)解(d)v3=vP13=w1lP13P14(↑)
lP13P14()
∴w3=w1
lP13P34
3
第六章部分题解参考
6-9试根据图6-52中注明的尺寸判断各铰链四杆机构的类型。
图6-52习题6-9图
解(a)∵lmax+lmin=110+40=150<Sl其余=90+70=160
最短杆为机架
∴该机构为双曲柄机构
(b)∵lmax+lmin=120+45=165<Sl其余=100+70=170最短杆邻边为机架
∴该机构为曲柄摇杆机构
(c)∵lmax+lmin=100+50=150>Sl其余=70+60=130
∴该机构为双摇杆机构
(d)∵lmax+lmin=100+50=150<Sl其余=90+70=160最短杆对边为机架
∴该机构为双摇杆机构
6-10在图6-53所示的四杆机构中,若a=17,c=8,d=21。
则b在什么范围内时机构有曲柄存在它是哪个构件
解分析:
⑴根据曲柄存在条件②,若存在曲柄,则b不能小于c;若b=c,则不满足曲柄存在条件①。
所以b一定大于c。
⑵若b>c,则四杆中c为最短杆,若有曲柄,则一定是CD杆。
b>d:
lmax+lmin=b+c≤Sl其余=a+d图6-53习题6-10图
∴b≤a+d-c=17+21-8=30b<d:
lmax+lmin=d+c≤Sl其余=a+b
∴b≥d+c-a=21+8-17=12
结论:
12≤b≤30时机构有曲柄存在,CD杆为曲柄
6-13设计一脚踏轧棉机的曲柄摇杆机构。
AD在铅垂线上,要求踏板CD在水平位置上下各摆动10°,且lCD=500mm,lAD=1000mm。
试用图解法求曲柄AB和连杆BC的长度。
解作图步骤:
①按ml=m/mm比例,作出A、D、C、C1和C2点。
②连接AC1、AC2,以A为圆心AC1为半径作圆交AC2于E点。
③作EC2的垂直平分线n-n交EC2于F点,则FC2的长度为曲柄AB的长度。
④作出机构运动简图ABCD及B1、B2点。
⑤测量必要的长度尺寸,得到设计结果。
注:
以上作图步骤可以不写出,但图中必须保留所有的作图线条。
lAB=mlAB=´8=m=80mm(计算值:
mm)
lBC=mlBC=´112=m=1120mm(计算值:
mm)图6-56习题6-13图
习题6-13解图
6-14设计一曲柄摇杆机构。
已知摇杆长度l4=100mm,摆角y=450,行程速比系数K=。
试根据gmin
解
≥40o的条件确定其余三杆的尺寸。
lAB=mlAB=´=m=29mm(计算值:
29mm)lBC=mlBC=´=m=147mm(计算值:
mm)gmin=33°(计算值:
°)
不满足gmin≥40o传力条件,重新设计
lAB=mlAB=´17==34mm(计算值:
mm)lBC=mlBC=´=m=109mm(计算值:
mm)
gmin=40°(计算值:
°)
满足gmin≥40o传力条件
6-15设计一导杆机构。
已知机架长度l1=100mm,行程速比系数K=,试用图解法求曲柄的长度。
KlAB=mlAB1=´13=m=26mm(计算值:
mm)
6-16设计一曲柄滑块机构。
如图6-57所示,已知滑块的行程图6-57习题6-16图
s=50mm,偏距e=10mm。
行程速比系数K=。
试用作图法求出曲柄和连杆的长度。
lAB=mlAB2=´=m=mm(计算值:
mm)lBC=mlB2C2=´=m=mm(计算值:
mm)
第七章部分题解参考
7-10在图7-31所示运动规律线图中,各段运动规律未表示完全,请根据给定部分补足其余部分(位移线图要求准确画出,速度和加速度线图可用示意图表示)。
图7-31习题7-10图解
7-11一滚子对心移动从动件盘形凸轮机构,凸轮为一偏心轮,其半径R=30mm,偏心距e=15mm,滚子半径rk=10mm,凸轮顺时针转动,角速度w为常数。
试求:
⑴画出凸轮机构的运动简图。
⑵作出凸轮的理论廓线、基圆以及从动件位移曲线s~j图。
解
7-12按图7-32所示位移曲线,设计尖端移动从动件盘形凸轮的廓线。
并分析最大压力角发生在何处(提示:
从压力角公式来分析)。
v2解由压力角计算公式:
tana=
(rb+s)w
∵v2、rb、w均为常数
∴s=0→a=amaxamax¢
即j=0°、j=300°,此两位置压力角a最大
图7-32习题7-12图
7-13设计一滚子对心移动从动件盘形凸轮机构。
已知凸轮基圆半径rb=40mm,滚子半径rk=10mm;凸轮逆时针等速回转,从动件在推程中按余弦加速度规律运动,回程中按等加-等减速规律运动,从动件行程h=32mm;凸轮在一个循环中的转角为:
jt=150°,js=30°,jh=120°,js¢=60°,试绘制从动件位移线图和凸轮的廓线。
解
7-14将7-13题改为滚子偏置移动从动件。
偏距e=20mm,试绘制其凸轮的廓线。
解
7-15如图7-33所示凸轮机构。
试用作图法在图上标出凸轮与滚子从动件从C点接触到D点接触时凸轮的转角jCD,并标出在D点接触时从动件的压力角aD和位移sD。
解
图7-33习题7-15图
第八章部分题解参考
8-23有一对齿轮传动,m=6mm,z1=20,z2=80,b=40mm。
为了缩小中心距,要改用m=4mm的一对齿轮来代替它。
设载荷系数K、齿数z1、z2及材料均不变。
试问为了保持原有接触疲劳强度,应取多大的齿宽b
解由接触疲劳强度:
sH=ZEZHZe500KT1(u+1)3≤[sH]
abu
∵载荷系数K、齿数z1、z2及材料均不变
∴ab=a¢b¢
bm240´62
即b¢=m2=42=90mm
¢
8-25一标准渐开线直齿圆柱齿轮,测得齿轮顶圆直径da=208mm,齿根圆直径df=172mm,齿数z=24,试求该齿轮的模数m和齿顶高系数ha*。
解∵da=(z+2ha*)m
da若取ha*=则m=da*=24208+2´1=8mm
∴m=*z+2ha
z+2ha
*则m=z+d2aha*=24+2082´=mm(非标,舍)若取ha=
答:
该齿轮的模数m=8mm,齿顶高系数ha*=。
8-26一对正确安装的渐开线标准直齿圆柱齿轮(正常齿制)。
已知模数m=4mm,齿数z1=25,z2=125。
求传动比i,中心距a。
并用作图法求实际啮合线长和重合度e。
解i=z2/z1=125/25=5
m4
a=
(z1+z2)=
(25+125)=300mm
22
d1=mz1=4´25=100mmd2=mz2=4´125=500mmdb1=mz1cosa=4´5cos20°=mmdb2=mz2cosa=4´25cos20°=mmda1=(z1+2ha*)m=(25+2´´4=108mmda2=(z2+2ha*)m=(125+2´´4=508mm
B1B2=´=m=21mm(计算值:
mm)
e=
===(计算值:
)pbpmcosa´4cos20°
8-29设在图8-54所示的齿轮传动中,z1=20,z2=20,z3=30。
齿轮材料均为45钢调质,HBS1=240,HBS2=260,HBS3=220。
工作寿命为2500h。
试确定在下述两种情况中,轮2的许用接触疲劳应力[sH]和许用弯曲疲劳应力[sF]。
⑴轮1主动,转速为20r/min;⑵轮2主动,转速为20r/min。
图8-45题8-29图
解⑴轮1主动:
gH2=gF2=1(轮2的接触应力为脉动循环,弯曲应力为对称循环)
N2=60n2gLh=60´20´1´2500=3´106p164图8-34:
YN2=p165图8-35:
ZN2=p164表8-8:
SFmin=,SHmin=(失效概率≤1/100)p162图8-32(c):
sFlim2=´230=161MPa(轮齿受双向弯曲应力作用)p163图8-33(c):
sHlim2=480MPa
YST=
p162式8-27:
[sF2]=sFlim2YSTYN2=161´2´=
SFmin
p162式8-28:
[sH2]=sHlim2ZN2=480´=
SHmin
⑵轮2主动:
gH2=gF2=2(轮2的接触应力和弯曲应力均为脉动循环)
N2=60n2gLh=60´20´2´2500=6´106p164图8-34:
YN2=p165图8-35:
ZN2=p164表8-8:
SFmin=,SHmin=(失效概率≤1/100)p162图8-32(c):
sFlim2=230MPap163图8-33(c):
sHlim2=480MPa
YST=
p162式8-27:
[sF2]=sFlim2YSTYN2=230´2´=
SFmin
p162式8-28:
[sH2]=sHlim2ZN2=480´=
SHmin
8-30一闭式单级直齿圆柱齿轮减速器。
小齿轮1的材料为40Cr,调质处理,齿面硬度250HBS;大齿轮2的材料为45钢,调质处理,齿面硬度220HBS。
电机驱动,传递功率P=10kW,n1=960r/nin,单向转动,载荷平稳,工作寿命为5年(每年工作300天,单班制工作)。
齿轮的基本参数为:
m=3mm,z1=25,z2=75,b1=65mm,b2=60mm。
试验算齿轮的接触疲劳强度和弯曲疲劳强度。
解①几何参数计算:
d1=mz1=3´25=75mmda1=(z1+2ha*)m=(25+2´´3=81mmαa1=cos-1(d1cosa/da1)=cos-1(75cos20°/81)=°d2=mz2=3´75=225mmda2=(z2+2ha*)m=(75+2´´3=231mm
αa2=cos-1(d2cosa/da2)=cos-1(225cos20°/231)=°m3
a=(z1+z2)=
´(25+75)=150mm
22
1e=[z1(tanaa1-tana¢)+z2(tanaa2-tana¢)]
2p
1
=[25´°-tan20°)+75´°-tan20°)]=
2pu=z2/z1=75/25=3
n2=z1n1/z2=25´960/75=320r/min
②载荷计算:
p152表8-5:
KA=
v=pd1n1=p´75´960=m/s
6000060000p153表8-6:
齿轮传动精度为9级,但常用为6~8级,故取齿轮传动精度为8级p152图8-21:
Kv=
b260fd===d175
p154图8-24:
Kb=(软齿面,对称布置)p154图8-25:
Ka=
K=KAKvKbKa=´´´=
P10
T1=9550
=9550´
=Nmn1960
③许用应力计算:
N1=60n1gLh=60´960´1´(5´300´8)=´108
N2=60n2gLh=60´320´1´(5´300´8)=´108
p164图8-34:
YN1=,YN2=p165图8-35:
ZN1=,ZN2=p164表8-8:
SFmin=,SHmin=(失效概率≤1/100)p162图8-32(c):
sFlim1=220MPa,sFlim2=270MPap163图8-33(c):
sHlim1=550MPa,sHlim2=620MPa
YST=
p162式8-27:
[sF1]=sFlim1YSTYN1=220´2´=MPa
SFmin
[sF2]=sFlim2YSTYN2=270´2´=MPa
SFmin
p162式8-28:
[sH1]=sHlim1ZN1=550´=539MPa
SHmin1
[sH2]=s
Hlim2ZN2=620´=MPa
1
min
MPa
④验算齿轮的接触疲劳强度:
p160表8-7:
ZE=MPap161图8-31:
ZH=
sH<[sH]齿面接触疲劳强度足够
⑤验算齿轮的弯曲疲劳强度:
p157图8-28:
YFa1=,YFa2=p158图8-29:
YSa1=,YSa2=
p158式8-23:
Ye=+=+=
e
p158式8-22:
sF1=2000KT1YFa1YSa1Ye=2000´´´´´=MPa
d1b1m75´65´3
sF2=
2000KT1YFa2YSa2Ye=
2000´´´´´=MPad1b2m75´60´3sF1<[sF1]齿轮1齿根弯曲疲劳强度足够sF2<[sF2]齿轮2齿根弯曲疲劳强度足够
第九章部分题解
9-6图9-17均是以蜗杆为主动件。
试在图上标出蜗轮(或蜗杆)的转向,蜗轮齿的倾斜方向,蜗杆、蜗轮所受力的方向。
图9-17习题9-6图
解(虚线箭头表示判定得到的旋转方向)
9-18已知一蜗杆传动,蜗杆主动,z1=4,蜗杆顶圆直径da1=48mm,轴节pa=,转速n1=1440r/min,蜗杆材料为45钢,齿面硬度HRC≥45,磨削、抛光;蜗轮材料为锡青铜。
试求该传动的啮合效率。
pa
解∵pa=pm∴m===4mm
pp
∵da1=d1+2ha*m∴d
mm
g=arctan(z1m)=arctan(4´4)=°d140
d12pn1402p´1440
vs=v1=2000´60=2000´60=m/scosgcosgcos
0.
p199表9-5:
线性插值fv=+=jv=arctan(fv)=°
∴h1=tang=tan=
tan(g+jv)tan+
9-20手动绞车的简图如图9-19所示。
手柄1与蜗杆2固接,蜗轮3与卷筒4固接。
已知m=8mm、z1=1、d1=63mm、z2=50,蜗杆蜗轮齿面间的当量摩擦因数fv=,手柄1的臂长L=320mm,卷筒4直径d4=200mm,重物W=1000N。
求:
(1)在图上画出重物上升时蜗杆的转向及蜗杆、蜗轮齿上所受各分力的方向;
(2)蜗杆传动的啮合效率;
(3)若不考虑轴承的效率,欲使重物匀速上升,手柄上应施加多大的力
(4)说明该传动是否具有自锁性
图9-19习题9-20图
解⑴蜗杆的转向及蜗杆、蜗轮齿上所受各分力的方向如图
⑵啮合效率:
g=arctan(
z1m)=arctan(1
´8)=°d163
jv=arvtanfv=arctan=°tangtan
h===tan(g+jv)tan+
⑶手柄上的力:
Ft3d3Wd4d4d4200
∵=∴Ft3=W=W=´1000=500N22d3mz28´50
Ft2
∵=tan(g+jv)∴Ft2=Ft3tan(g+jv)=500tan+=N
Ft3
Ft2d1Ft2d1´63
∵=FL∴F==N
22´320
或:
∵T3=T2ih∴
2
⑷自锁性:
∵g<jv
∴机构具有自锁性
第十章部分题解参考
10-4在图10-23所示的轮系中,已知各轮齿数,3¢为单头右旋蜗杆,求传动比i15。
10-6图10-25所示轮系中,所有齿轮的模数相等,且均为标准齿轮,若n1=200r/min,n3=50r/min。
求齿数z2¢及杆4的转速n4。
当1)n1、n3同向时;2)n1、n3反向时。
mm
解
∵i
n3-n4z1z2¢15´20
∴n4=(n1+5n3)/6
设n1为“+”
则1)n1、n3
 升级会员
升级会员 