ANSYS网格划分的一些例子.docx
《ANSYS网格划分的一些例子.docx》由会员分享,可在线阅读,更多相关《ANSYS网格划分的一些例子.docx(13页珍藏版)》请在冰豆网上搜索。
ANSYS网格划分的一些例子
虽然做出来了.但是我还是有一个问题想请教大家:
vsweep和mapp分网后形成网格各有什么规律?
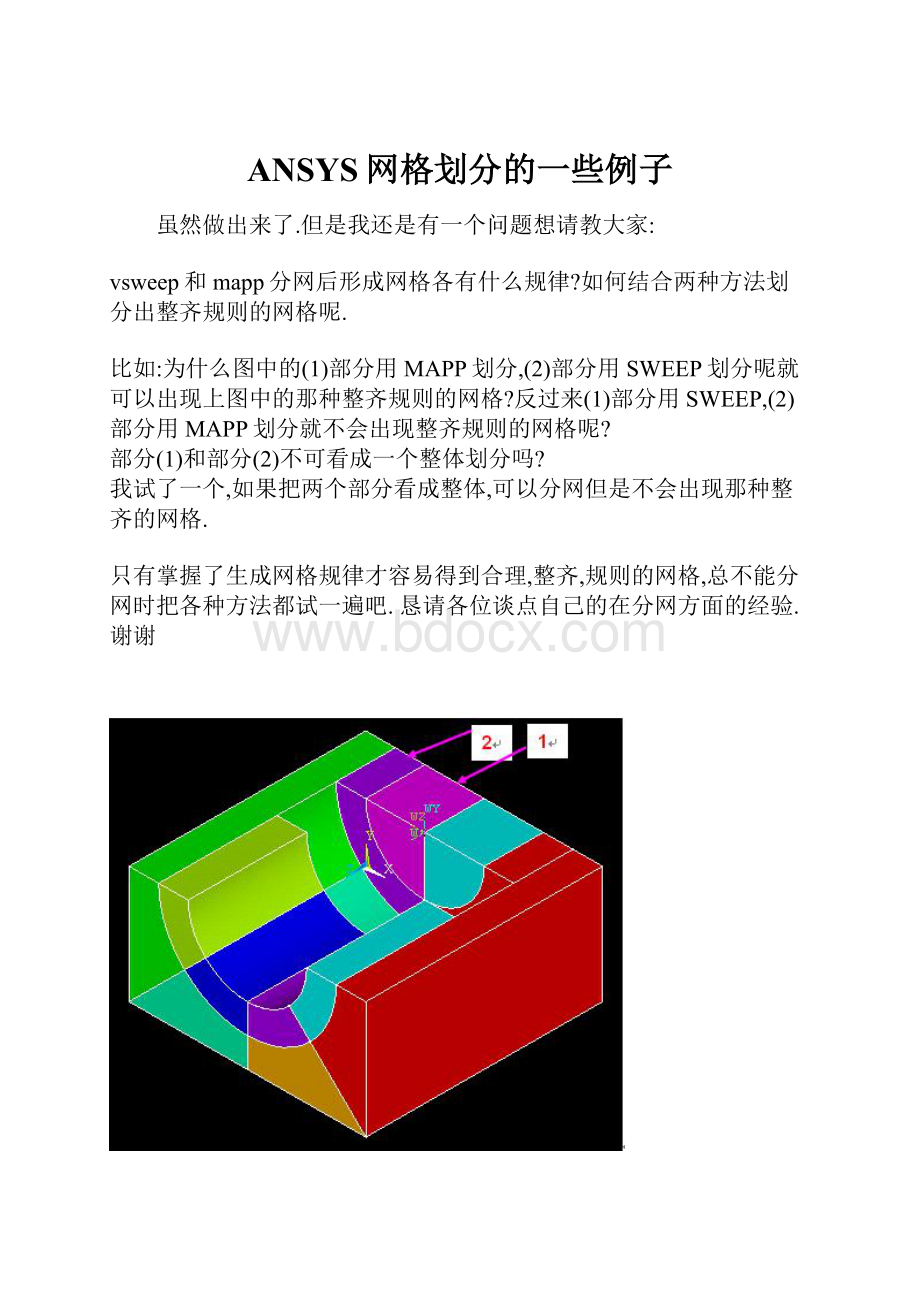
如何结合两种方法划分出整齐规则的网格呢.
比如:
为什么图中的
(1)部分用MAPP划分,
(2)部分用SWEEP划分呢就可以出现上图中的那种整齐规则的网格?
反过来
(1)部分用SWEEP,
(2)部分用MAPP划分就不会出现整齐规则的网格呢?
部分
(1)和部分
(2)不可看成一个整体划分吗?
我试了一个,如果把两个部分看成整体,可以分网但是不会出现那种整齐的网格.
只有掌握了生成网格规律才容易得到合理,整齐,规则的网格,总不能分网时把各种方法都试一遍吧.恳请各位谈点自己的在分网方面的经验.谢谢
1的三个边如果都设了分段数则sweep和map是一样的
et,1,42
et,2,45
cyl4,,,20
lsel,all
lesize,all,,,10
esize,,10
vext,1,,,,,20
aclear,all
amesh,1
不过好象中间不大好的!
!
!
还望高手指点!
命令流;
et,1,42
et,2,45
blc4,,,10,5
lesize,1,,,5
lesize,2,,,10
mshape,0,2d
mshkey,1
amesh,1
esize,,5
vrotat,1,,,,,,1,4
aclear,all
用map也可以,,取其四分之一,单元大小可控制!
做了一个!
/PREP7
CYL4,,,5
RECTNG,-1,1,-1,1,
FLST,2,2,5,ORDE,2
FITEM,2,1
FITEM,2,-2
AOVLAP,P51X
wpro,,90.000000,
wpro,,,45.000000
ASBW, 3
wpro,,,-45.000000
wpro,,,-45.000000
FLST,2,2,5,ORDE,2
FITEM,2,1
FITEM,2,4
ASBW,P51X
wpro,,,45.000000
wpro,,90.000000,
ET,1,PLANE42
ESIZE,1,0,
AMAP,6,12,9,7,8
WPSTYLE,,,,,,,,0
AMAP,7,12,10,5,8
AMAP,3,10,11,6,5
AMAP,5,6,7,9,11
AMAP,2,8,5,6,7
TYPE, 1
EXTOPT,ESIZE,10,0,
EXTOPT,ACLEAR,0
EXTOPT,ATTR,0,0,0
MAT,_Z2
REAL,_Z4
ESYS,0
ET,2,SOLID45
TYPE, 2
EXTOPT,ESIZE,10,0,
EXTOPT,ACLEAR,0
EXTOPT,ATTR,0,0,0
MAT,_Z2
REAL,_Z4
ESYS,0
VOFFST,2,5,,
VOFFST,6,5,,
VOFFST,7,5,,
VOFFST,5,5,,
VOFFST,3,5,,
总算搞出来了:
如何把网格画成这样?
请教高手,如何把界面处的网格画成这样?
ansys可以画成那样的,要多切割点volume,那个图看上去就是分成几个体单独划分网格,然后再merge起来的。
我觉得当不能划分的时候就切割成为更加简单的几何体,体元越接近6面体就越容易划分。
一个有孔六面体的网格划分
finish
/clear
/prep7
et,1,63
blc4,0,0,8,8,-50
cyl4,1.5,1.5,0.5,0,,360,-35
cyl4,3.0,1.5,0.5,0,,360,-35
vsbv,1,2
vsbv,4,3
wpoff,0,0,-20
vsbw,1,,delete
numcmp,all
wpoff,0,0,20
FLST,2,2,5,ORDE,2
FITEM,2,3
FITEM,2,5
VEXT,P51X,,,0,0,-15,,,,
VOVLAP,all
VGLUE,all
ET,2,SOLID45
!
*
FLST,5,4,6,ORDE,3
FITEM,5,1
FITEM,5,3
FITEM,5,-5
CM,_Y,VOLU
VSEL,,,,P51X
CM,_Y1,VOLU
CHKMSH,'VOLU'
CMSEL,S,_Y
VSWEEP,_Y1
CMDELE,_Y
CMDELE,_Y1
CMDELE,_Y2
!
*
SMRT,6
SMRT,5
ESIZE,0.2,0,
FLST,5,4,6,ORDE,3
FITEM,5,1
FITEM,5,3
FITEM,5,-5
CM,_Y,VOLU
VSEL,,,,P51X
CM,_Y1,VOLU
CHKMSH,'VOLU'
CMSEL,S,_Y
!
*
!
*
VCLEAR,_Y1
VSWEEP,_Y1
CMDELE,_Y
CMDELE,_Y1
CMDELE,_Y2
FINISH
框架结构的实体模型网格划分问题?
/prep7
/pnum,volu,1
block,-0.3,0.3,10,0,-0.3,0.3
block,-0.3,0.3,10,0,6-0.3,6.3
block,6-0.3,6+0.3,10,0,-0.3,0.3
block,6-0.3,6+0.3,10,0,6-0.3,6.3
block,-0.15,0.15,10,10-0.5,0.3,6-0.3
block,6-0.15,6+0.15,10,10-0.5,0.3,6-0.3
block,0.3,6-0.3,10,10-0.5,-0.15,0.15
block,0.3,6-0.3,10,10-0.5,6-0.15,6+0.15
block,0.15,0.3,10,10-0.15,0.3,6-0.3
block,0.3,6-0.3,10,10-0.15,0.15,6-0.15
block,6-0.3,6-0.15,10,10-0.15,0.3,6-0.3
vglue,all
你的模型很规则,应该不难划分网格。
^_^
不同单元之间的连接
2007年08月04日星期六下午07:
55
一般来说,按“杆梁壳体”单元顺序,只要后一种单元的自由度完全包含前一种单元的自由度,则只要有公共节点即可,不需要约束方程,否则需要耦合自由度与约事方程。
例如:
(1)杆与梁、壳、体单元有公共节点即可,不需要约束方程。
(2)梁与壳有公共节点即可,也不需要约束写约束方程;壳梁自由度数目相同,自由度也相同,尽管壳的rotz是虚的自由度,也不妨碍二者之间的关系,这有点类同于梁与杆的关系。
(3)梁与体则要在相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
(4)壳与体则也要相同位置建立不同的节点 ,然后在节点处耦合自由度与施加约束方程。
举例:
有一长为100mm的矩形截面梁,截面为10X1mm,与一规格为20mmX7mmX10mm的实体连接,约束实体的端面,在梁端施加大小为3N的y方向的压力,梁与实体都为一材料,弹性模量为30Gpa,泊松比为0.3。
本例主要讲解梁与实体连接处如何利用耦合及约束方程进行处理。
命令流如下:
FINI
/CLE
/FILNAME,BEAM_AND_SOLID_ELEMENTS_CONNECTION!
定义工作文件名
/TITLE,COUPLE_AND_CONSTRAINT_EQUATION !
定义工作名
/PREP7
ET,1,SOLID95 !
定义实体单元类型为SOLID95
ET,2,BEAM4 !
定义梁单元类型为BEAM4
MP,EX,1,3E4 !
定义材料的弹性模量
MP,PRXY,1,0.3 !
定义泊松比
R,1 !
定义实体单元实常数
R,2,10.0,10/12.0,1000/12.0,10.0,1.0 !
定义梁单元实常数
BLC4,,,20,7,10 !
创建矩形块为实体模型
WPOFFS,0,3.5 !
将工作平面向Y方向移动3.5
WPROTA,0,90 !
将工作平面绕X轴旋转90度
VSBW,ALL !
将实体沿工作平面剖开
WPOFFS,0,5 !
将工作平面向Y方向移动5
WPROTA,0,90 !
将工作平面绕X轴旋转90度
VSBW,ALL !
将实体沿工作平面剖开
WPCSYS,-1 !
将工作平面设为与总体笛卡儿坐标一致
K,100,20,3.5,5 !
创建关键点
K,101,120,3.5,5 !
创建关键点
L,100,101 !
连接关键点生成梁的线实体
LSEL,S,LOC,X,21,130 !
选择梁线
LATT,1,2,2 !
指定梁的单元属性
LESIZE,ALL,,,10 !
指定梁上的单元份数
LMESH,ALL !
划分梁单元
VSEL,ALL !
选择所有实体
VATT,1,1,1 !
设置实体的单元属性
ESIZE,1 !
指定实体单元尺寸
MSHAPE,0,2D !
设置实体单元为2D
MSHKEY,1 !
设置为映射网格划分方法
VMESH,ALL !
划分实体单元
ALLS !
全选
FINI !
退出前处理
!
------------------------
/SOLU !
进入求解器
ASEL,S,LOC,X,0 !
选择实体的端面
DA,ALL,ALL !
约束实体端面
ALLS !
全选
FK,101,FY,-3.0 !
在两端施加Y向压力
CP,1,UX,1,21 !
耦合节点1和节点21X方向自由度
CP,2,UY,1,21 !
耦合节点1和节点21Y方向自由度
CP,3,UZ,1,21 !
耦合节点1和节点21Z方向自由度
CE,1,0,626,UX,1,2328,UX,-1,1,ROTY,-ABS(NZ(626)-NZ(2328))!
设置约束方程
CE,2,0,67,UX,1,4283,UX,-1,1,ROTZ,-ABS(NY(67)-NY(4283)) !
设置约束方程
CE,3,0,67,UZ,1,4283,UZ,-1,1,ROTX,-ABS(NY(67)-NY(4283)) !
设置约束方程
ALLS !
全选
SOLVE !
保存
FINI !
退出求解器
!
------------------------
/POST1 !
进入通用后处理
PLNSOL,U,Y,0,1.0 !
显示Y方向位移
PLNSOL,S,EQV,0,1.0 !
显示等效应力
ETABLE,ZL1,SMISC,1 !
读取梁单元上I节点X方向的力
ETABLE,ZL2,SMISC,7 !
读取梁单元上J节点X方向的力
ETABLE,MZ1,SMISC,6 !
读取梁单元上I节点Z方向的力矩
ETABLE,MZ2,SMISC,12 !
读取梁单元上J节点Z方向的力矩
PLETAB,ZL1 !
显示梁单元X方向的力
PLETAB,MZ1 !
显示梁单元Z方向力矩
!
**********************************************
上面所述的不同单元之间的接连方法主要是用耦合自由度和约束方程来实现的,有一定的局限性,只适用于小位移,下面介绍一种支持大位移算法的方法,MPC法。
MPC即MultipointConstraint,多点约束方程,其原理与前面所说的方程的技术几乎一致,将不连续、自由度不协调的单元网格连接起来,不需要连接边界上的节点完全一一对应。
MPC能够连接的模型一般有以下几种。
solid模型-solid模型
shell模型-shell模型
solid模型-shell模型
solid模型-beam模型
shell模型-beam模型
在ANSYS中,实现上述MPC技术有三种途径。
(1)通过MPC184单元定义模型的刚性或者二力杆连接关系。
定义MPC184单元模型与定义杆的操作完全一致,而MPC单元的作用可以是刚性杆(三个自由度的连接关系)或者刚性梁(六个自由度的连接关系)。
(2)利用约束方程菜单路径MainMenu>preprocessor>Coupling/Ceqn>shell/solidInterface创建壳与实体模型之间的装配关系。
(3)利用ANSYS接触向导功能定义模型之间的装配关系。
选择菜单路径MainMenu>preprocessor>Modeling>Creat>ContactPair,弹出一序列的接触向导对话框,按照提示进行操作,在创建接触对前,单击Optionalsetting按钮弹出Contactproperties对话框,将Basic选项卡中的Contactalgorithm即接触算法设置为MPCalgorithm。
或者,在定义完接触对后,再将接触算法修改为MPCalgorithm,就相当于定义MPC多点约束关系进行多点约束算法。
主自由度是有限元结构分析的内容,在结构分析中,往往会遇到这样的结构,就是两个自由度之间刚度非常强,但几何上尺度又不能视为一点,为了保证计算刚度不会太大溢出,就定义一点为主节点(或主自由度),相应的其他那个或那些就是从节点(或从自由度),求解时只是主节点位移是未知量,从节点只是个相应几何变换得到。
yejet说的是自由度缩减问题,80年代,计算机内存非常小(64K)时,为了解大一点问题的方法,现在几乎不再采用了
 升级会员
升级会员 