第二十章气动执行机构.docx
《第二十章气动执行机构.docx》由会员分享,可在线阅读,更多相关《第二十章气动执行机构.docx(12页珍藏版)》请在冰豆网上搜索。
第二十章气动执行机构
第二十章气动执行机构
第一节电/气转换器
电/气转换器是将电动控制系统的标准信号(4~20mADC)转换为标准气压信号(20~100KPa)。
通过它可以组成电/气混合系统以便发挥各自的优点,扩大其使用范围。
例如,电/气转换器可用来把电动调节器或DCS的输出信号经转换后用以驱动气动执行机构,或将来自各种电动变送器的输出信号经转换后送往气动调节器。
电/气转换器是基于力矩平衡原理进行工作的。
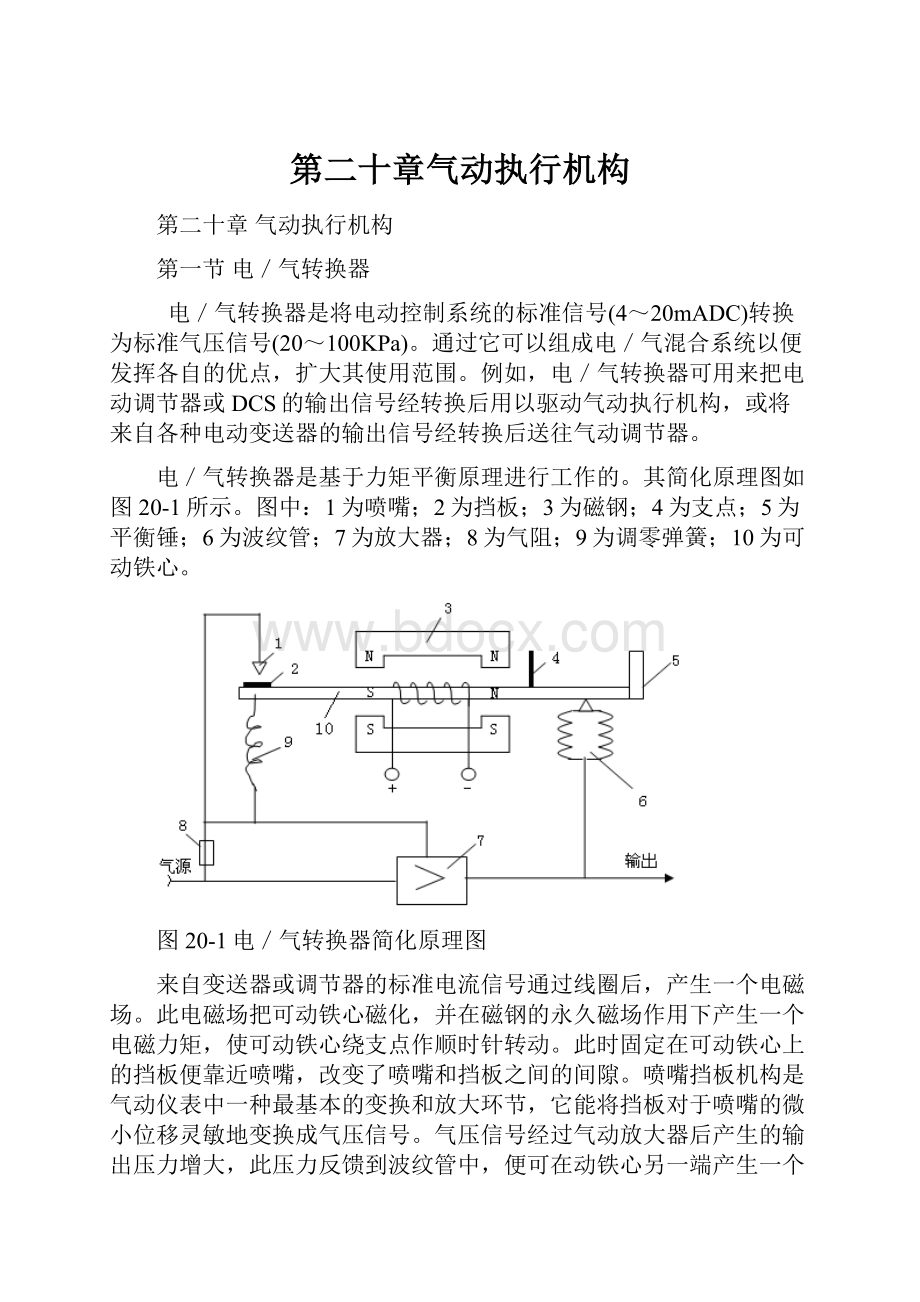
其简化原理图如图20-1所示。
图中:
1为喷嘴;2为挡板;3为磁钢;4为支点;5为平衡锤;6为波纹管;7为放大器;8为气阻;9为调零弹簧;10为可动铁心。
图20-1电/气转换器简化原理图
来自变送器或调节器的标准电流信号通过线圈后,产生一个电磁场。
此电磁场把可动铁心磁化,并在磁钢的永久磁场作用下产生一个电磁力矩,使可动铁心绕支点作顺时针转动。
此时固定在可动铁心上的挡板便靠近喷嘴,改变了喷嘴和挡板之间的间隙。
喷嘴挡板机构是气动仪表中一种最基本的变换和放大环节,它能将挡板对于喷嘴的微小位移灵敏地变换成气压信号。
气压信号经过气动放大器后产生的输出压力增大,此压力反馈到波纹管中,便可在动铁心另一端产生一个使可动铁心绕支点作逆时针转动的反馈力矩,此力矩与线圈产生的电磁力矩相平衡,构成闭环系统。
从而达到使输出压力与输入电信号成比例地变化。
第二节气动薄膜执行机构
气动执行机构主要有薄膜式和活塞式两大类,并以薄膜式执行机构应用最广,在电厂气动基地式自动控制系统中,常采用这类执行机构。
气动薄膜执行机构以清洁、干燥的压缩空气为动力能源,它接收DCS或调节器或人工给定的20~100kPa压力信号,并将此信号转换成相应的阀杆位移(或称行程),以调节阀门、闸门等调节机构的开度。
气动薄膜执行器主要由气动薄膜执行机构、控制机构和气动阀门定位器(辅助设备)几大部分组成,如图20-2所示。
图中:
1为波纹膜片;2为压缩弹簧;3为调节件;4为推杆;5为阀杆;6为压板;7为上阀盖;8为阀体;9为下阀盖;10为阀座;11为阀芯;12为填料;13为反馈连杆;14为反馈凸轮;15为挡板;16为喷嘴;17为气动放大器;18为托板;19为波纹管;20为拉紧弹簧。
一、气动薄膜执行机构
图20-2气动阀门定位器与气动薄膜执行器的配合
气动薄膜执行机构的结构如图20-2中右侧点划线框内的上半部分所示。
它的主要工作部件由波纹膜片l、压缩弹簧2和推杆4组成。
当压力信号(通常是20~100kPa)通入薄膜气室时,在波纹膜片1上产生向下的推力。
此推力克服压缩弹簧2的反作用力后,使推杆4产生位移,直至弹簧2被压缩的反作用力与信号压力在膜片1上产生的推力相平衡时为止。
显然,压力信号越大,向下的推力也越大,与之相平衡的弹簧力也越大,即弹簧的压缩量也就越大。
平衡时,推杆的位移与输入压力信号的大小成正比关系。
推杆的位移就是执行机构的输出,通常称它为行程。
调节件3可用来改变压缩弹簧2的初始压紧力,从而调整执行机构的工作零点。
二、气动阀门定位器
在执行机构工作条件差而要求调节质量高的场合,常把气动阀门定位器与气动薄膜执行机构配套使用,组成闭环回路,利用负反馈原理来改善调节质量,提高灵敏度和稳定性,使阀门能按输入的调节信号准确地确定自己的开度。
气动阀门定位器是一个气压-位移反馈系统,它按位移平衡原理进行工作,其动作过程如下:
当来自调节器(或定值器)的气压信号
增加时,波纹管19的自由端产生相应的推力,推动托板18以反馈凸轮14为支点逆时针偏转,使固定在托板18上的挡板15与喷嘴16之间的距离减小,喷嘴的背压上升,气动放大器17的输出压力
增大。
输入气动薄膜执行机构的气室A,对波纹膜片1施加向下的推力。
此推力克服压缩弹簧2的反作用力后,使推杆4向下移动。
推杆下移时,通过反馈连杆13带动反馈凸轮14绕凸轮轴O顺时针偏转,从而推动托板18以波纹管19为支点逆时针转动,于是固定在托板18上的挡板离开喷嘴16,喷嘴的背压下降,放大器17的输出压力减小。
当输入信号使挡板15所产生的位移与反馈连杆13动作(即阀杆5的行程)使挡板15产生的位移相平衡时,推杆便稳定在一个新的位置上。
此位置与输入信号相对应,即执行机构的行程s与输入压力信号
成比例关系。
气动阀门定位器与气动薄膜执行机构配用时,也能实现正、反作用两种动作方式。
正作用方式就是当输入气压信号增加时,调节机构输出行程增加(推杆4下移);反之,即
为反作用方式。
正作用方式要改变成反作用方式,只需将反馈凸轮反向安装,并将喷嘴从托板18的左侧移至右侧即可。
三、工作特性
根据前述分析,若忽略机械系统的惯性及摩擦影响,则可画出气动阀门定位器与气动薄膜执行机构配合使用时的方框图,如图20-3所示。
图20-3气动薄膜执行机构方框图
图中:
为输入信号;s为阀杆行程;
为波纹管19的有效面积;
为波纹管19的位移刚度;
为波纹管19的顶点到喷嘴15之间的位移转换系数(根据三角形相似原理确定);K为放大器17的转换放大系数;
为波纹膜片的有效面积;
为波纹膜片及压缩弹簧组的位移刚度;
为阀杆5到挡板15之间的位移转换系数(根据凸轮轮廓的形状及三角形相似原理确定);
为波纹管所产生的输入力;
为波纹管顶点所产生的输出位移;
为输入信号使挡板15产生的位移;
为阀杆5的行程使挡板15产生的位移;
为波纹膜片产生的推力:
由图20-2可得出该系统的传递函数为
(20-1)
当
时,则上式可简化成
(20-2)
式(20-2)所表示的是气动薄膜执行机构与气动阀门定位器配合使用时的输入气压信号与输出阀杆位移(或行程)之间的关系。
由式(20-2)可知,该执行机构具有以下几个特性:
⑴该执行机构可看成是一个比例环节,其比例系数与波纹管的有效面积
和它的位移刚度
、位移转换系数
(托板长度)和
(凸轮的几何形状)有关。
⑵气动薄膜执行机构由于配用了阀门定位器,引入了深度的位移负反馈,因而消除了执行机构膜片有效面积和弹簧刚度的变化、薄膜气室的气容以及阀杆摩擦力等因素对阀位的影响,保证了阀芯按输入信号精确定位,提高了调节准确度。
⑶由于使用了气动功率放大器,增强了供气能力,因而大大加快了执行机构的动作速度,改善了调节阀的动态特性。
在特殊情况下还可改变定位器中的反馈凸轮形状(即改变
)来修改调节阀的流量特性,以适应调节系统的要求。
第三节ZSLD型电信号气动长行程执行机构
气动活塞式执行机构由气缸内的活塞输出推力,由于气缸的允许操作压力较大,故可获得较大的推力,并容易制造成长行程的执行机构。
所以,气动活塞式执行机构特别适用于高静压、高差压及需要较大推力和位移(转角或直线位移)的工艺场合,显然在火电厂中的许多控制系统中,应用这类执行机构较为合适。
电信号气动长行程执行机构是以干燥、清洁的压缩空气为动力能源的一种电-气复合式执行机构。
它可以与DCS或调节器配套使用,接收DCS或调节器或人工给定的4~20mADC输入信号,输出与输入信号成比例的角位移(0°~90°),以一定转矩推动调节机构(阀门、挡板)动作。
为适应控制系统的要求,气动执行机构还具有一些附加功能,如三断(断气源、断电源、断电信号)自锁保护功能;阀位移电气远传功能等。
电信号气动长行程执行机构主要由气缸、手操机构、输出轴、电-气阀门定位器、阀位传送器、三断自锁装置(自锁阀、电磁阀、压力开关)、切换开关、平衡阀等部件组成。
ZSLD型电信号气动长行程执行机构工作原理如图20-4所示。
图中:
1为气缸;2为输出臂;3为连杆;4为副杠杆;5为滚轮;6为凸轮;7为凸轮转动支点;8为主杠杆;9为反馈弹簧;10为调零弹簧;11为主杠杆支点;12为力矩电机;13为平衡弹簧;14为喷嘴;15为挡板;16为放大器;17为副杠杆支点;18为两位三通电磁阀;19为控制阀;20为继电器;21为开关电路;22为气阀;23为平衡阀;24为输出轴。
图20-4ZSLD型电信号气动长行程执行机构工作原理示意图
一、电-气阀门定位器
电-气阀门定位器是电信号长行程执行机构的一个重要辅助设备,气动执行机构的输出(角位移)与其输入电流信号成比例关系是由阀门定位器来实现的。
阀门定位器的输入信号为4~20mA直流电流,输出信号为20~100kPa。
因此,电-气阀门定位器相当于电-气转换器和气动阀门定位器的组合。
电-气阀门定位器按力矩平衡原理进行工作。
在定位器的主杠杆8上承受了三个作用力:
①信号电流流过线圈时,在力矩电机内产生与信号电流成正比的输出力;②反馈弹簧9的拉力;③调零弹簧10的拉力。
当系统处于平衡状态时,上述三个力对主杠杆支点11的力矩之和等于零。
此时,安装在主杠杆下端的挡板15处于两个喷嘴14的中间位置,使两放大器16的输出压力相等,故气缸l的活塞停在与输入电流相对应的某一位置上。
当输入电流信号
增加时,力矩电机的输出力也增加。
假定该力的方向为向左,则对主杠杆产生逆时针方向的力矩,使主杠杆8绕支点11作逆时针方向的转动,固定在主杠杆8下端的挡板15靠近右喷嘴而离开左喷嘴,右喷嘴的背压增加,左喷嘴的背压下降。
两个背压信号经各自的放大器放大后输至气缸l活塞的上、下侧,使上气缸的压力增加,下气缸的压力降低。
在上、下气缸的压差作用下,气缸活塞向下运动,带动输出臂作逆时针方向转动,输出轴24也转动,这个角位移被送到控制机构(阀门或挡板)。
输出臂转动时,带动连杆3向下移动,使凸轮6绕支点7逆时针转动,凸轮6推动滚轮5,使副杠杆4绕支点17顺时针转动,反馈弹簧9被拉伸,反馈弹簧对主杠杆8的拉力增加,产生一个顺时针方向的力矩作用在主杠杆8上,主杠杆作顺时针方向转动。
当反馈弹簧力对主杠杆所产生的反馈力矩与力矩电机输出力作用在主杠杆上的力矩相平衡时,整个系统重新达到平衡状态,但输出臂(轴)已转动了一定的角度。
输出臂的转角与输入电流信号的大小相对应,但气缸活塞两侧产生的压差与外负载相平衡。
因此,改变电流信号的大小,即可改变输出臂的转角,它们之间有一一对应的关系。
当输入电流信号减小时,其动作过程与上述情况相反。
由于凸轮绕支点7的转角与连杆3的位移之间不是线性关系,而是正弦关系,因此,用正弦凸轮6进行补偿,以使反馈力矩与连杆3的位移呈线性关系,从而使气动执行机构的输出转角与输入电流信号之间呈线性关系。
气动长行程执行机构具有正作用和反作用两种作用方式。
正作用方式就是当输入电流信号增加时,输出臂作顺时针方向转动;反之,即为反作用方式。
改变输入阀门定位器的电流信号的方向,就可改变定位器的作用方式,即把正作用方式改成反作用方式或把反作用方式改成正作用方式。
二、手操机构
为了保证自动调节系统运行的安全性和操作的灵活性,在气动执行机构中设置了手操机构。
转动手轮可改变输出轴的转角,从而改变阀门、挡板等调节机构的开度、实现手动操作。
三、阀位移传送器
阀位移传送器的作用是,将气动执行机构的输出轴的转角位移
0°~90°线性地转换成4~20mADC信号,用以指示阀位,并实现系统的位置反馈。
为此,要求阀位移传送器具有良好的线性度,以保证执行机构的输出轴紧跟调节器的输出信号转动。
阀位移传送器输出电流与阀位开度之间的关系与执行机构的正、反作用方式相对应:
正作用时,阀位开度增加,输出电流增加;反作用时,阀位开度增加,输出电流减小。
正、反作用方式的改变,只需将差动变压器次级绕组的两接线端子交换连接,即可实现。
当作用方式改变后,必须重新调整输出电流的范围。
四、三断自锁装置
三断自锁指的是气动执行机构在工作气源中断、电源中断、电信号中断时,其输出臂转角能够保持在原先的位置上。
该自锁装置采用气锁方式,即在自锁时,将通往上、下气缸的气路切断,使活塞不能动作,从而达到自锁的目的。
三断自锁装置主要由控制阀、气阀和电磁阀等组成。
下面分别说明该装置在断气源、断电源和断电信号时的自锁原理。
⒈气源中断自锁原理
气源中断自锁装置由控制阀19和两个气阀2(气开阀)组成。
在正常工作状态下,控制阀的膜片硬芯C在弹簧力和气室压力所产生的集中力作用下处于平衡位置,这时A阀口关闭,B阀口打开,工作气源与控制阀气室相通,两个气阀22因有气而打开。
气缸1的活塞位移受电-气阀门定位器输出气压信号的控制。
当气源压力下降到某一数值(称为闭锁压力)或断气源时,因控制阀气室压力减小,对膜片所产生的向上集中力减小,膜片硬芯在上部弹簧力作用下向下移动,将A阀口打开,B阀口关闭,控制阀气室与大气相通,气阀22因断气而关闭。
这样,即切断了通往上、下气缸的气路,使活塞停留在断气源前的瞬间位置上,实现了断气源阀位保持(即自锁)的目的。
当气源压力恢复时,该自锁装置可自动恢复正常工作。
闭锁压力值的大小可根据需要用控制阀19上的手动旋钮调整弹簧的预紧力来实现。
⒉电源中断自锁原理
在气源中断自锁装置的基础上,再设置一个两位三通电磁阀18,即可实现断电源自锁。
正常供电情况下,电磁阀l的阀口l与2相通,阀口l与3和2与3均不通,此时气源经电磁阀输至控制阀。
断电源时,电磁阀动作,使阀口1与3和1与2均不通,阀口2与3相通。
因阀口3通大气,故控制阀的气源压力降到零,相当于气源中断而自锁,即实现了断电源自锁的保护作用。
⒊电信号中断自锁原理
在电源信号回路中串联电阻R1,信号电流在R1上的电压降作为开关信号的输入电压。
在正常情况下,R1上的电压较大,继电器J激励,常开触点K闭合,两位三通电磁阀18的阀口1与2相通,阀口l与3和2与3均不通,气源经电磁阀输至控制阀。
当电信号中断时,R1上的电压降为零,继电器J失电,常开触点K断开,电磁阀的电源被切断,此时相当于电源中断而自锁。
此三断自锁装置在故障消除后能自动复位。
自锁装置同时还备有压力开关,可供自锁时报警之用。
电信号气动长行程执行机构主要由气缸、电-气阀门定位器、阀位传送器、手操机构、三断自锁装置等部分组成。
定位器按力矩平衡原理进行工作,实现输入电流信号与执行机构的输出角位移成比例关系(比例环节)。
电信号气动长行程执行机构具有手操功能、三断自锁保护、正-反作用运行方式和多种调整环节等特点。
习题及思考题
20-1气动执行机构具有什么特点?
20-2气动薄膜执行机构由哪几部分组成?
各部分的作用是什么?
20-3气动阀门定位器起什么作用?
它由哪几部分组成?
它是按什么原理进行工作的?
20-4电信号气动长行程执行机构由哪几部分组成?
各部分的作用是什么?
20-5电-气阀门定位器由哪几部分组成?
它按什么原理进行工作?
简述其动作过程?
20-6气动长行程执行机构中的手操机构起何作用?
20-7简述电信号气动长行程执行机构在断气源、断电源、断电信号时的输出轴自锁原理。
20-8阀位移传送器的作用是什么?
20-9怎样实现气动执行机构的“正-反”作用方式?
20-10电信号气动长行程执行机构在静态(输出转角不变)时,气缸活塞上、下的压力是否相等?
为什么?
 升级会员
升级会员 