激光原理课程设计.docx
《激光原理课程设计.docx》由会员分享,可在线阅读,更多相关《激光原理课程设计.docx(15页珍藏版)》请在冰豆网上搜索。
激光原理课程设计
激光原理课程设计报告
任务一:
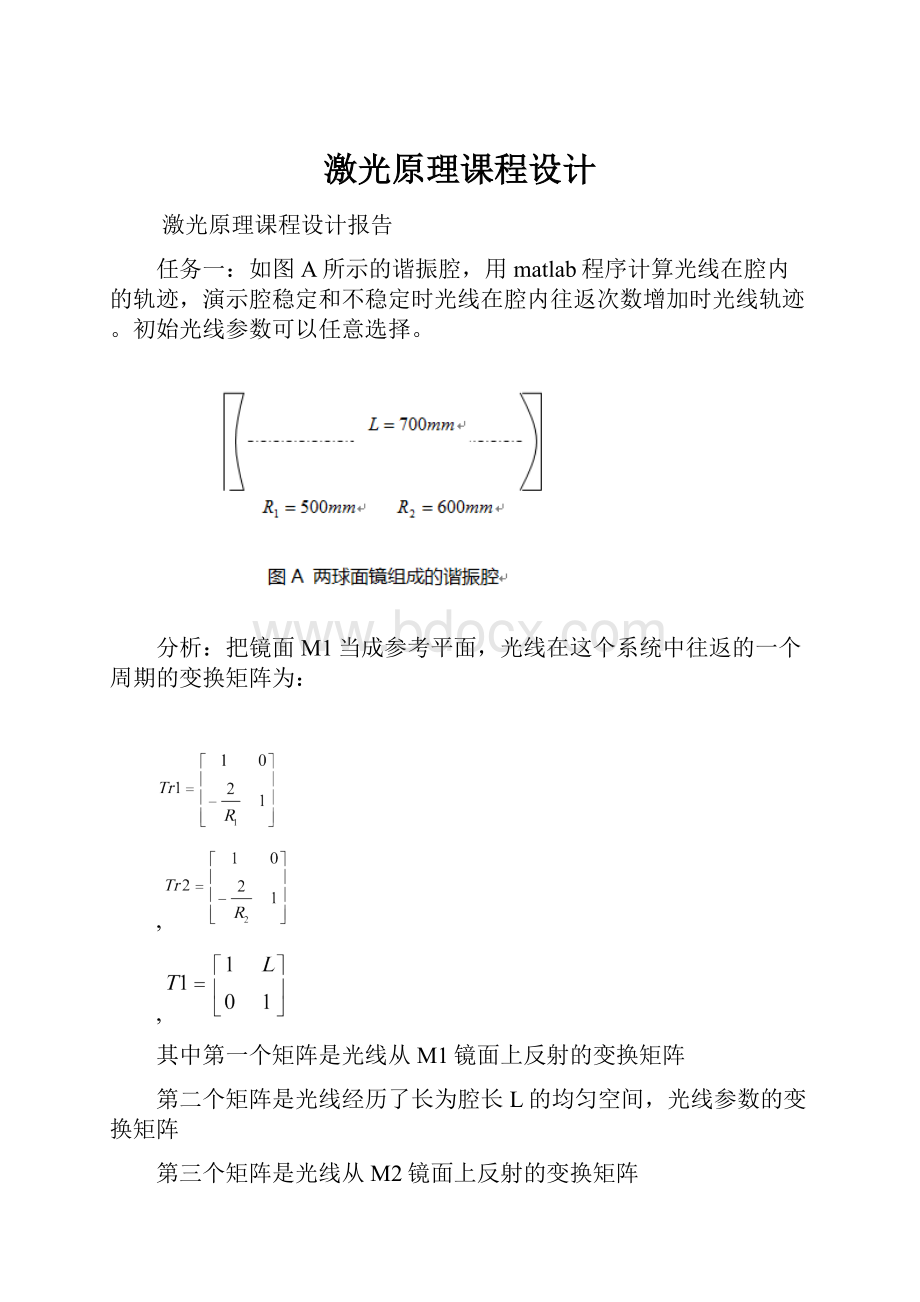
如图A所示的谐振腔,用matlab程序计算光线在腔内的轨迹,演示腔稳定和不稳定时光线在腔内往返次数增加时光线轨迹。
初始光线参数可以任意选择。
分析:
把镜面M1当成参考平面,光线在这个系统中往返的一个周期的变换矩阵为:
其中第一个矩阵是光线从M1镜面上反射的变换矩阵
第二个矩阵是光线经历了长为腔长L的均匀空间,光线参数的变换矩阵
第三个矩阵是光线从M2镜面上反射的变换矩阵
整个系统的变换矩阵为
根据题目的给出的数据,我们可以知道R1=500mm,R2=600mm,L=700mm时,把这些数据代入到上面的矩阵中,可以得到
,
,
在这我们就可以得到
整个系统的变换矩阵为
这是往返一周的轨迹
我们把光在谐振腔内的传播轨迹以
这两个极坐标确定,就可以进一步的画出其中的轨迹
要想得到往返多次的轨迹图像,只需设置一个循环,重复计算即可
我们可以先计算一下这个谐振腔是否稳定
所以经推测,应该是稳定谐振腔
matlab程序为:
R1=500;R2=600;L=700;%输入初始条件%
Tr1=[10;-2/R11];Tr2=[10;-2/R2,1];TL=[1,L;01];%输入变换矩阵%
T=TL*Tr2*TL*Tr1%一个往返的周期的总变换矩阵%
r0=0;theta0=pi/180;%设定极坐标的初始条件%
A0=[r0;theta0];%把极坐标的两个参数作为一个矩阵%
m=100;%设定光在该谐振腔的往返次数%
forn=1:
1:
m;%设定循环函数,该函数循环m次%
x0=0:
1:
L;
y0=A0(1,1)+x0*A0(2,1);%该坐标描述的是从M1出发,到达M2镜面期间的光线轨迹%
plot(x0,y0,’b’);%画出轨迹%
holdon
A1=TL*A0;%该坐标描述的是从M2反射,反射回去的光线轨迹%
A2=Tr2*A1;
x2=L:
-1:
0;
y2=A2(1,1)-(x2-L)*A2(2,1);
plot(x2,y2,'g');%画出轨迹%
A3=TL*A2;
A4=Tr1*A3;
A0=A4;
end
S=(T(1,1)+T(2,2))/2
axistight%计算是否稳定%
运行结果为:
S=-0.8667
下面是图像结果
往返一次时的MATLAB图像
往返2次时的MATLAB图像
往返3次时的MATLAB图像
往返10次时的MATLAB图像
往返50次时的MATLAB图像
稳定性条件取决于总体变换矩阵的对角元
是否出现于-1和1之间,经计算,其值为-0.8667,图像也显示,光不会跑出谐振腔,所以该系统是稳定的。
如果S=1时我们看一下结果怎样
(其它条件不变只改L)将L=700改为L=1100
此时S=1,谐振腔处于临界状态,光束往返50周后,在腔内的轨迹
若将L=700改为L=3000,此时S=39
下面是m=50的图像
显而易见,在第三次往返后,光射出了谐振腔,因此不是稳定的系统。
小结:
一个系统的变换矩阵的对角元
决定了该谐振腔的稳定。
心得:
由于本人新手。
。
。
在用Matlab绘出光的轨迹时,想用标准的直角坐标将光的每一点描绘出来。
。
。
最终还是乖乖的用极坐标写出来了(实在弄不成,就参考了一下网上的做法。
。
。
),避免了不必要的麻烦(因为变换矩阵就是基于极坐标提出来的)这是第一个点。
第二点就是要善于利用循环,这就是解决这道题的关键两个点,这道题极大了让我加深了谐振腔变换矩阵和稳定条件的概念。
任务二:
如图所示的谐振腔,由球面反射镜和平面反射镜之间插入一薄透镜构成。
(1)分析计算透镜与平面镜之间距离在什么范围内腔是稳定的;
(2)在腔稳定情况下,演示在腔内往返100次以上时光线轨迹;
(3)计算自再现高斯光束的q参数,并演示往返一周腔内光斑半径曲线自再现(波长
)
要求:
追踪光线在谐振腔内的轨迹、自再现高斯光束和非自在线高斯光束在腔内的光斑半径。
分析:
(1)我们先假设光从透镜射入,其将经过
的距离到达平面镜,然后被平面镜反射再通过
的距离射出透镜,我假设这一个过程是一个系统,就相当于光从一个透镜射入,穿过一个
的系统,再从一个透镜射出。
设该系统的变换矩阵为
光线在腔内往返传播一周的矩阵为
其中,
,(为反射镜的变换矩阵)
(为在长为
系统的变换矩阵)
代入数据有
,
由-1为45.
(2)matlab程序为:
F=50,L1=45;
L2=800;R=1000;%输入初始数据%
TL1=[1,L1;0,1];Tf=[10;-1/F,1];TL2=[1L2;01];Tr=[10;-2/R1];%写出相关的四个变换矩阵%
T=TL1*Tf*TL2*Tr*TL2*Tf*TL1%写出系统的总变换矩阵%
S=(T(1,1)+T(2,2))/2%判断该谐振腔是否稳定%
r0=5;theta0=0.5*pi/180;%设定光初始的极坐标数据%
A0=[r0;theta0];%把极坐标的两个参数作为一个矩阵%
m=100;%设定往返次数%
forn=1:
1:
m;%确定循环%
x0=0:
1:
L1;
y0=A0(1,1)+x0*A0(2,1);
plot(x0,y0,'b');%光从透镜射入,经过
距离到达平面镜前的轨迹%
holdon
A1=TL1*A0;
A2=Tf*A1;
x2=L1:
1:
L1+L2;
y2=A2(1,1)+(x2-L1)*A2(2,1);%光从平面镜反射,经过
距离从透镜射出的轨迹%
plot(x2,y2,'g');
A3=TL2*A2;
A4=Tr*A3;
x4=(L1+L2):
-1:
L1;
y4=A4(1,1)-(x4-L1-L2)*A4(2,1);%光从透镜射出,经过
的距离到达反射镜的轨迹%
plot(x4,y4,'r')
A5=TL2*A4;
A6=Tf*A5;
x6=L1:
-1:
0;
y6=A6(1,1)-(x6-L1)*A6(2,1);%光被反射镜反射,经过
的距离,再次到达透镜的轨迹%
plot(x6,y6,'y');
A7=TL1*A6;
A0=A7;
end
axistight
运行结果为:
T=
-0.2500-6.2500
0.1500-0.2500
S=-0.2500
当L1=45mm时,该谐振腔是稳定的,下面是光线往返100次轨迹
心得:
该程序和任务一的处理过程大体上一致,只要正确的分析出光在谐振腔内的走向,就很容易解决问题了。
(3)计算q参数
思路:
首先是q的公式,即q=
所以先要把整个系统的变换矩阵给求出来
再根据
计算出光腰半径,再根据ABCD定律将高斯光束通过光学定律所得到的q参数变化求出来,即
,这样就可以分析出各个q值,该题就可以解决
F=50,l1=48;
wavelength=0.0005;
l2=800;R=1000;
%输入初始数据%
Tl1=[1,l1;0,1];Tf=[10;-1/F,1];Tl2=[1l2;01];Tr=[10;-2/R1];
T=Tl1*Tf*Tl2*Tr*Tl2*Tf*Tl1
%输入系统变换矩阵%
S=(T(1,1)+T(2,2))/2
%计算该谐振腔是否稳定%
q0=(T(2,2)-T(1,1)+i*sqrt(1-(T(1,1)+T(2,2)).^2/4))/T(2,1)%计算参数q0%
z0=real(q0);f=imag(q0)
w0=sqrt(f*wavelength/pi);%计算光腰半径%
z1=0:
1:
l1;
wz1p=w0*sqrt(1+((z1-z0)/f).^2);
wz1n=-w0*sqrt(1+((z1-z0)/f).^2);
plot(z1,wz1p,z1,wz1n);
holdon
%计算从透镜射入到平面镜之间的光斑半径曲线%
q1=(Tl1(1,1)*q0+Tl1(1,2))/(Tl1(2,1)*q0+Tl1(2,2));
q2=(Tf(1,1)*q1+Tf(1,2))/(Tf(2,1)*q1+Tf(2,2));
z02=real(q2);
f2=imag(q2);
w02=sqrt(f2*wavelength/pi);
z2=l1:
1:
l1+l2;
wz2p=w02*sqrt(1+((z2-l1+z02)/f2).^2);
wz2n=-w02*sqrt(1+((z2-l1+z02)/f2).^2);
plot(z2,wz2p,z2,wz2n);
holdon
%计算光从平面镜反射,从透镜射出的光斑半径曲线%
q3=(Tl2(1,1)*q2+Tl2(1,2))/(Tl2(2,1)*q2+Tl2(2,2));
q4=(Tr(1,1)*q3+Tr(1,2))/(Tr(2,1)*q3+Tr(2,2));
z04=-real(q4);
f4=imag(q4);
w04=sqrt(f4*wavelength/pi);
z4=(l1+l2):
-1:
l1;
wz4p=w04*sqrt(1+((z4-l1-l2+z04)/f4).^2)-0.01;
wz4n=-w04*sqrt(1+((z4-l1-l2+z04)/f4).^2)+0.01;
plot(z4,wz4p,'r',z4,wz4n,'r');
holdon
%计算光从透镜射出,到达反射镜的光斑半径曲线%
q5=(Tl2(1,1)*q4+Tl2(1,2))/(Tl2(2,1)*q4+Tl2(2,2));
q6=(Tf(1,1)*q5+Tf(1,2))/(Tf(2,1)*q5+Tf(2,2));
z06=-real(q6);
f6=imag(q6);
w06=sqrt(f6*wavelength/pi);
z6=l1:
-1:
0;
wz6p=w06*sqrt(1+((z6-l1+z06)/f6).^2)-0.01;
wz6n=-w06*sqrt(1+((z6-l1+z06)/f6).^2)+0.01;
plot(z6,wz6p,'r',z6,wz6n,'r');
holdon%计算光从反射镜射出,到达透镜的光斑半径曲线%
q7=(Tl1(1,1)*q6+Tl1(1,2))/(Tl1(2,1)*q6+Tl1(2,2));
axistight
运行结果:
T=0.2000-6.4000
0.15000.2000
S=0.2000
q0=0.0000+6.5320i
------实部为0,表示此处为光腰位置且等相位面为平面
f=6.5320
小结:
透镜与平面镜的距离为40
 升级会员
升级会员 