万秀林组 基于SIMULINK的异步电机模型推导和仿真.docx
《万秀林组 基于SIMULINK的异步电机模型推导和仿真.docx》由会员分享,可在线阅读,更多相关《万秀林组 基于SIMULINK的异步电机模型推导和仿真.docx(13页珍藏版)》请在冰豆网上搜索。
万秀林组基于SIMULINK的异步电机模型推导和仿真
基于SIMULINK的异步电机模型推导和仿真
摘要:
利用MATLAB对异步电机的3-2变换,2s-2r变换进行矩阵计算,得到异步电机转变后的电机模型,再利用SIMULINK工具对此模型进行仿真,验证推导的异步电机模型的可行性。
关键词:
异步电机;推导;建模;仿真;MATLAB
1引言
随着电力电子技术的飞速发展和交流电机调速理论的不断深入,异步电机的应用日益广泛。
然而异步电机是一个高阶、非线性、强耦合的多变量系统,通过坐标变换,可以消除瞬变过程中的周期性时变系统和降低方程的阶数,从而简化数学模型。
基于这种观念,利用计算机仿真技术去建模既省时又直观。
本文采用异步电机基于两相静止坐标系下的数学模型,结合坐标变换,利用MATLAB软件中的
动态仿真SIMULINK,建立异步电机的仿真模型。
并通过实例进行实时仿真。
2基于静止坐标系下异步电机的数学模型
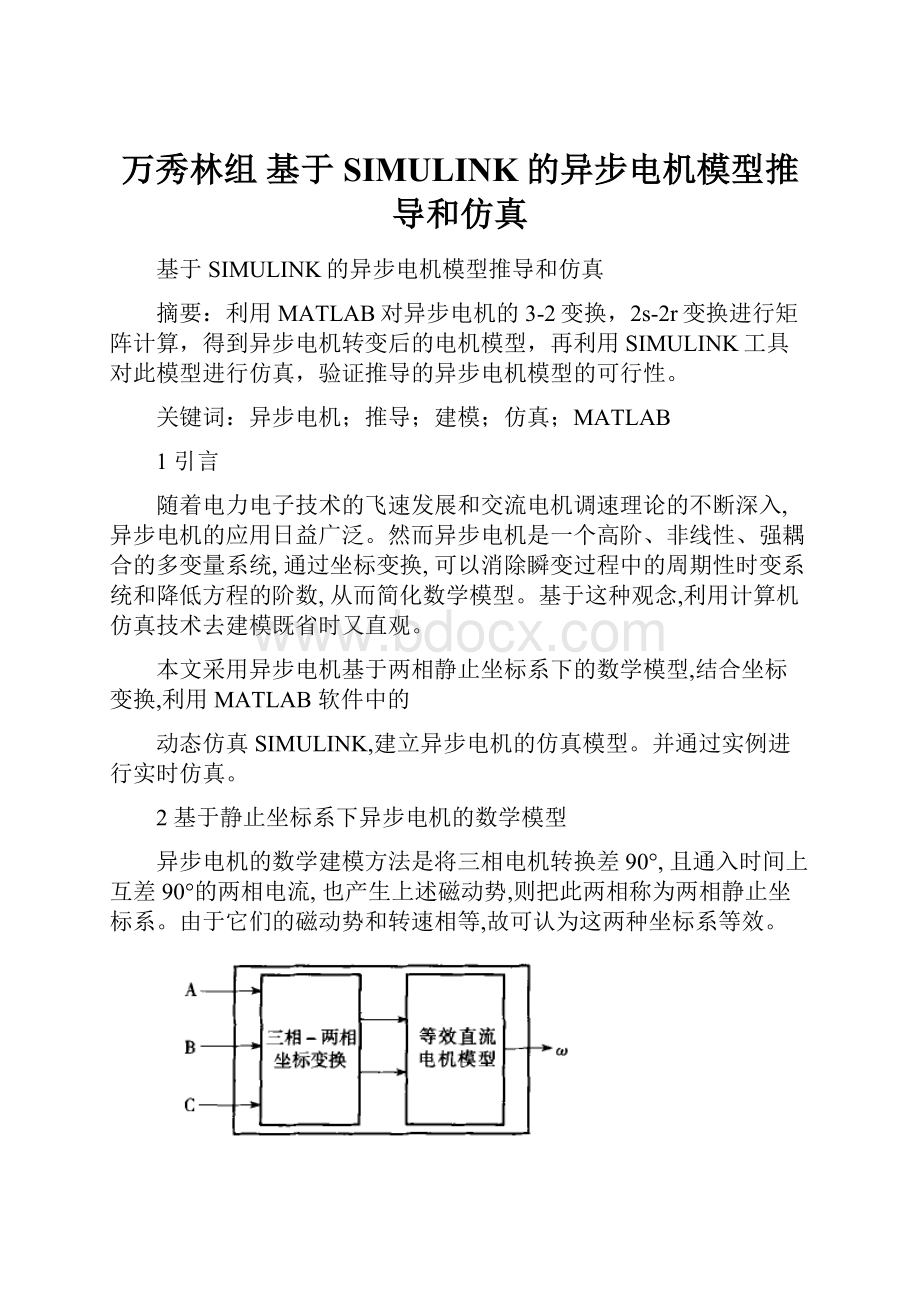
异步电机的数学建模方法是将三相电机转换差90°,且通入时间上互差90°的两相电流,也产生上述磁动势,则把此两相称为两相静止坐标系。
由于它们的磁动势和转速相等,故可认为这两种坐标系等效。
三相-两相的转换矩阵如下:
3-2转换矩阵如下:
转矩方程式和运动方程式:
3异步电机模型和推导
MATLAB是一种交互式仿真系统,其语言表述形式与其数学表达形式相同。
故MATLAB特别适合于动态系统的建模与仿真。
本文借助S-函数实现电机异步仿真。
在程序中用到的S-函数是在sfuntmpl.m的基础上,经过改进编写的。
然后在SIMULINK中调用S-function模块即可。
为了能得到异步电机的定、转子电流,计算出电机的转矩与转速,必须先进行矩阵变换,将电压矩阵方程转换成状态方程的形式,然后将其写入S函数中。
异步电机模型的推导
4S-function函数的模块组合
通过Mux模块合并为一个矢量,经过sfuntemple1.m函数得到一个矢量输出,再通过Dumux模块分解出这几个变量,分别为iα1、iβ1和iα2、iβ2
SIMULINK仿真结构图
S-function函数程序
function[sys,x0,str,ts]=sfuntmpl1(t,x,u,flag,r1,r2,l1,l2,lm,k1,k2)
case0,
[sys,x0,str,ts]=mdlInitializeSizes;
case1,
sys=mdlDerivatives(t,x,u,r1,r2,l1,l2,lm,k1,k2);
case2,
sys=mdlUpdate(t,x,u);
case3,
sys=mdlOutputs(t,x,u);
case9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:
blocks:
unhandledFlag',num2str(flag));
end
functionsys=mdlDerivatives(t,x,u,r1,r2,l1,l2,lm,k1,k2)
sys=[-k1*r1,k1*lm*lm*u(3)/l2,k1*lm*r2/l2,...
k1*lm*u(3);-k1*u(3)*lm*lm/l2,-k1*r1,...
-k1*lm*u(3),k1*lm*r2/l2;-k2*r1,k2*l1*u(3)...
k2*l1*r2/lm,k2*l1*l2*u(3)/lm;-k2*l1*u(3),...
-k2*r1,-k2*l1*l2*u(3)/lm,k2*l1*r2/lm]*x...
+[k1*u
(1);k1*u
(2);k2*u
(1);k2*u
(2)];
functionsys=mdlUpdate(t,x,u)
sys=[];
functionsys=mdlOutputs(t,x,u)
sys=x;
参数设置
4电机仿真实验
电机模型进行仿真,电机参数:
额定电压为90V;额定电流为4.2A;额定转速为1660r/min;额定频率为60Hz;额定转矩为3.316N·m;电机极对数为2;转动惯量J为0.00047kgm;转子电感L2为0.08377H;转子电阻R2为1.03Ω;定子电感L1为0.0805H;定子电阻R1为1.2Ω;定、转子互感Lm为0.0777H。
动态仿真将观察电机加上三相正弦交流电源
和负载变动时,起动过程中电机转矩、转速、电流等变化。
空载起动仿真
进行全压理想空载起动,即令负载转矩为零。
如下图所示为理想空载起动仿真结果。
可以看出在理想空载过程中,转速超调比较大,在0.4秒过后基本稳定,主要原因在于这只是个开环系统,动态静态指标必然不会很理想。
5结束语
系统而简略的介绍了用MATLAB/SIMULINK进行电机的模拟仿真,介绍了异步电机矢量变换控制系统数学模型的建立。
结合实例介绍了MATLAB/SIMULINK建模的过程,并对异步电机模型进行了有层次的仿真,这对研究交流调速系统提供了有力的支持。
利用MATLAB/SIMULINK建立异步电机模型,模型直观,不用编程,易于使用,为以后验证设计思想、进行高效成功的设计打下了良好的基础。
在进行此次仿真过程中,我们小组对异步电机的两个转换关系进行了数学上的推导,进一步明白了转换的过程和对应的物理意义,在应用SIMULINK的过程中,主要对S函数的编写修改有了亲身的体会认识,在参数设置和调整过程中,尝试了N多种数值,最后找到了比较理想的参数。
在这次简单的建模仿真作业中,遇到的问题远远比想象中的要多,让我们深切感受到了实际过程的严谨复杂,在S函数修改、参数调整之后,示波器波形一直往负方向,然后我们排查每一个环节,最后查出来居然是输入信号的相序原因……还有种种的问题种种的偏差,都在一个个解决之后,终于比较满意地完成了这次建模仿真。
虽然我们小组的问题结构上比较简单,只是用数学模型代替交流电机进行一下开环仿真,但是其中的理论知识、SIMULINK功能的应用,还是很广泛的。
经过这次作业,最大的收获是对异步电机的数学模型来源,S函数的编写修改有了实际的操作。
 升级会员
升级会员 