压片成型机.docx
《压片成型机.docx》由会员分享,可在线阅读,更多相关《压片成型机.docx(16页珍藏版)》请在冰豆网上搜索。
压片成型机
压片成形机
一、设计题目
设计目的
机械设计是根据使用要求对机械的工作原理、结构、运动方式、力和能量的传递方式、各个零件的材料和形状尺寸以及润滑方式等进行构思、分析和计算,并将其转化成为制造依据的工作过程。
机械设计是机械产品生产的第一步,是决定机械产品性能的最主要环节,整个过程蕴含着创新和发明。
为了综合运用机械原理课程的理论知识,分析和解决与本课程有关的实际问题,使所学的知识进一步巩固和加强,我们参加了此次的机械原理课程设计。
(1)总功能要求
设计自动压片成形机,将具有一定湿度的粉状原料(如陶瓷干粉或药粉)定量送入压形位置,经压制成后脱离该位置。
机器的整个工作过程(送料-压形-脱离)均自动完成。
该机器可以压制陶瓷圆形片坯和药剂(片)等。
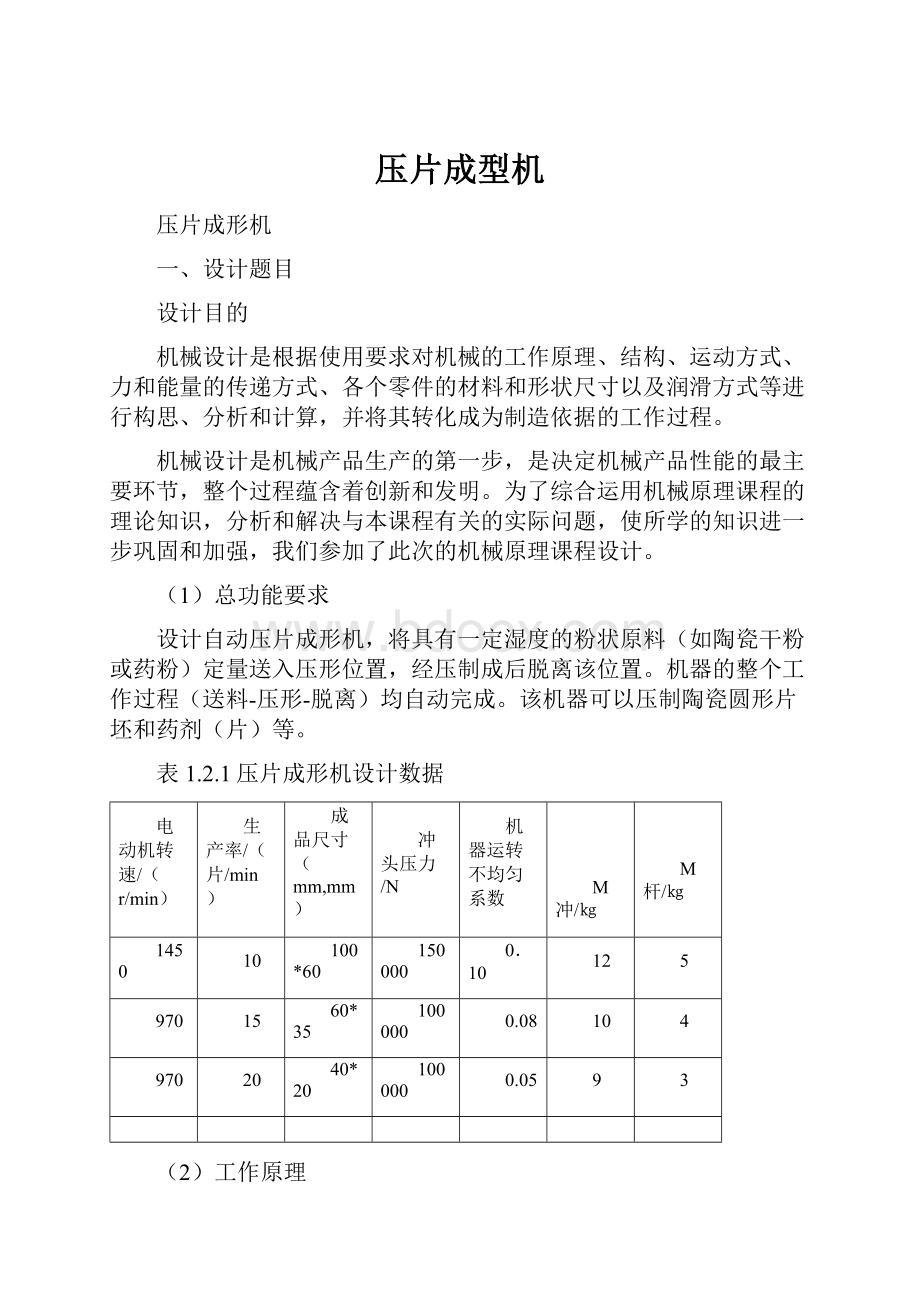
表1.2.1压片成形机设计数据
电动机转速/(r/min)
生产率/(片/min)
成品尺寸(mm,mm)
冲头压力/N
机器运转不均匀系数
M冲/㎏
M杆/㎏
1450
10
100*60
150000
0.10
12
5
970
15
60*35
100000
0.08
10
4
970
20
40*20
100000
0.05
9
3
(2)工作原理
1、压片成型机工艺动作分解:
⑴干粉料均匀筛入圆筒形型腔(图1.2.2a)。
⑵下冲头下沉3mm,预防上冲头进入型腔时粉料扑出(图1.2.2b)。
⑶上和下冲头同时加压(图1.2.2c),并保持一段时间。
⑷上冲头退出,下冲头随后顶出压好的片坯(图1.2.2d)。
5料筛推出片坯(图1.2.2a)。
原始数据
1、冲头压力100000N150000N
2、生产率15片/min20片/min
3、机器运转不均匀系数0.080.10
4、电机转速970r/min1450r/min
二.设计要求
(1)设计要求
⑴压片成形机一般至少包括连杆机构和凸轮机构和齿轮机构在内的三种机构。
⑵画出机器的运动方案简图与运动循环图。
拟订运动循环图时,执行构件的动作起止位置可根据具体情况重叠安排,但必须满足工艺上各个动作的配合,在时间和空间上不能出现干涉。
⑶设计凸轮机构,自行确定运动规律,选择基圆半径,校核最大压力角与最小曲率半径,计算凸轮轮廓线。
⑷设计计算齿轮机构,确定传动比,选择适当的摸数。
⑸对连杆机构进行运动设计。
并进行连杆机构的运动分析,绘出运动线图。
如果是采用连杆机构作为下冲压机构,还应该进行连杆机构的动态静力分析,计算飞轮转动惯量。
⑹编写设计计算说明书。
⑺学生可进一步完成机器的计算机演示验证和凸轮的数控加工等。
(2)上冲头和下冲头与料筛的设计要求
图1.3.2设计要求
1上冲头完成往复直移(与动铅垂上下),下移至重点后有短时间的间歇,起保压作用,保压时间为0.4s左右。
因为冲头上升后要留有料筛进入的空间,故冲头行程为90~100mm。
因为冲头压力比较大,因而加压机构应有增力功能(图1.3.2a)。
2下冲头先下沉3mm,然后上升8mm,加压后停歇保压,继而上升16mm,将成形片坯顶到与台面平齐后停歇,待料筛将片坯推离冲头后,再下移18mm,到待料位置(图1.3.2b)。
3料筛在模具型腔上方往复振动筛料,然后向左退回。
待批料成型并被推出型腔后,料筛在台面上右移约45~50mm,推卸片坯(图1.2.3c)。
设计提示
⑴各执行机构应包括:
实现上冲头运动的主加压机构和实现下冲头运动的辅助加压机构和实现料筛运动的上下料机构。
各执行机构必须能满足工艺的运动要求,可以有多种不同型式的机构选用。
⑵由于压片成形机的工作压力比较大,行程短,一般采用肘杆式增力冲压机构
作为主体机构。
它是由曲柄摇杆机构滑块机构串接而成。
先设计摇杆滑块机构,为了
保压,要求摇杆在铅垂位置的±2°范围内的滑块的位移量≦0.4mm。
据此可得摇杆长度:
式中:
为摇杆滑块机构中连杆与摇杆长度之比,一般取1~2。
根据上冲头的行程长度,即可得摇杆的另一极限位置,摇杆的摆角以小于60°为宜。
设计曲柄摇杆机构时,为了“增力”,曲柄的回转中心可在摇杆活动链和垂于摇杆铅垂位置的直线上适当选取,以改善机构在冲头下极限位置附近的传力性能。
根据摇杆的三个极限位置(±2°位置和另一个极限位置),设定与之对应的曲柄三个位置,其中两个对应于摇杆的两个极限位置,曲柄应在与连杆共线的位置,曲柄另一个位置可根据保压时间来设定,因此可根据两连架杆懂得三组对应位置来设计此机构。
设计完成后,应检查曲柄存在条件,若不满足要求,则重新选择曲柄回转中心。
也可以在选择曲柄回转中心以后,根据摇柄两个极限位置时曲柄和连杆共线的条件,确定连杆和曲柄长度。
在检查摇杆在铅垂位置±2°时,应该注意曲柄对应转角是否满足保压时间要求。
曲柄回转中心距摇杆铅垂位置越远,机构行程速比系数越小,冲头在下极限位置附近的位移变化越小,但机构尺寸越大。
⑶辅助加压机构可采用凸轮机构,推杆运动线图可以根据运动循环图确定。
设计时,要正确确定凸轮基圆半径。
为了便于传动,可以将筛料机构置于主体机构曲柄同侧。
整个机构系统采用一个电动机集中驱动。
要注意主体机构曲柄和凸轮机构起始位置间的相位关系,否则机器将不能正常工作。
⑷可以通过对主体机构进行运动分析,以及冲头相对于曲柄转角的运动线图,检查保压时间是否近似满足要求。
进行机构动态静力分析时,要考虑各杆(曲柄除外)的惯性力和惯性力偶,以及冲头的惯性力。
冲头质量m冲和各杆质量m杆(各杆质心位于杆长中点)以及机器运转不均匀系数均见表1,则各杆对质心轴的转动惯量可求。
认为上下冲头同时加压和保压时生产阻力为常数。
飞轮的安装位置由设计者自行确定,计算飞轮转动惯量时可以不考虑其他机构的转动惯量。
确定电动机所需要功率时还要考虑下冲头运动和筛料运动所需功率。
三.运动方案评估(上冲头为主)
上冲头运动方案设计及选择
方案一
此设计优缺点:
方案1采用的是凸轮机构的设计方案。
如图所示,该机构由2个可动构件和机架组成,包含1个高副和2个低副,其自由度F=3*2-2*2-1*1=1,其自由度也等于原动件个数,故其运动也确定。
机构中,能满足上冲头的设计保压要求,不过在下压过程中只依靠从动件自身的重力,下压力不足,且传动性不及方案1好,并且由于从动件的形成较大,故凸轮在设计制造时的尺寸也会很大,而且凸轮与滚子之间为点接触易磨损。
所以予以否决。
方案二
此设计优缺点:
方案2采用的是气缸做为动力的设计方案。
如图所示该机构由7个可动构件和机架组成,包含10个低副,其自由度为F=3*7-2*10=1,其自由度也等于原动件个数,故其运动也确定。
此机构只需一个很小的力就能产生很大的顶升力,但对材料的要求很高,要实现整套机器的运动需要多个油泵,成本较高,且速度较慢。
方案三
此设计优缺点:
方案3采用的是连杆机构的设计方案。
如图所示,该机构由5个可动构件和机架组成,包含6个转动副和1个移动副,共计7个低副。
故方案1所用机构的自由度F=3*5-2*7=1,其自由度等于原动件个数,故其运动确定。
此方案3是在上冲头方案中最好的一个,既能提供较大的工作压力,行程较短,也能有保压功能,整体结构简单、轻盈,并能够轻松达到上冲头的行程要求。
也是本次设计采用的方案。
3.1机构选择:
驱动方式采用电动机驱动。
由已知的压片成形机的功能分解,分别选择相应的机构,以实现所需的各项功能。
见表3。
表3压片成形机的机构选型
功能
执行构件
工艺动作
执行机构
冲压成形
上冲头
直线上下往复运动
曲柄滑块机构
皮带轮轮机构
冲压成形
下冲头
直线上下往复运动
盘形凸轮机构
皮带轮轮机构
横向送料
推头
直线左右往复运动
盘形凸轮机构
皮带轮轮机构
3.2运动协调设计:
压片成形机是由曲柄滑块机构,凸轮机构组成。
负责上冲头工作的曲柄周转一圈完成一次工作循环,同样下冲头盘形凸轮以同样的转速转一圈作为一个工作周期,制作出成品。
其他的送料、齿轮机构作为辅助机构。
最终压片成形机设计如下图:
说明:
此方案使用曲柄摇杆机构和摇杆滑块机构串接而成,结构简单、轻盈,能满足保压要求,并能够轻松达到上冲头的行程要求。
由于此方案中,料筛采用凸轮机构,可使其达到往复振动的运动效果;下冲头也采用凸轮机构,可达到保压效果,且此方案的稳定性较好,故选用此方案。
四、运动循环图设计(详见附录1)
根据工艺动作拟定运动循环图
●以上冲头加压机构主动件转角为横坐标,以各机构执行构件的位移为纵坐标画出位移曲线。
循环运动图上的位移曲线主要着眼于运动的起迄位置,而不必准确表示出运动规律。
●拟定运动循环图时,可执行构件的动作起迄位置可根据具体情况重叠安排,但必须满足工艺上各个动作的配合,在时间和空间上不能出现“干涉”。
●从运动的特性来看,上,下冲头的运动轨迹在同一条竖直移动导路上,并且与送料机构的运动轨迹垂直相交,所以应避免这三个机构各自的运动出现互相干涉的情况,如上,下冲头的运动速度的冲突,送料机构水平移动与上,下冲头竖直移动的运动冲突等,以确保各个机构的运动不发生冲突,从而保证各自设计功能的实现和机器正常的运作。
拟定运动循环图:
见附录1
五、连杆机构尺寸计算(见附录2)
5.1设计要求
(1)上冲头行程为100mm左右
(2)当摇杆角度和铅垂位置之间相差
时,滑块的位移小于0.4mm(即产生保压的功能)
(3)摇杆的角度小于60度
(4)曲柄摇杆机构必须具有一定急回特性,以致更多的时间用于加压
5.2设计过程
(1)由于压片机的工作压力较大,行程较短,一般采用肘杆式增力冲压机构作为主体机构,它是由曲柄摇杆机构和摇杆滑块机构串联而成。
先设计摇杆滑块机构,为了保压,要求摇杆在垂直位置的
范围内,滑块的位移量
mm。
据此可得摇杆长度
式中
摇杆滑块机构中连杆与摇杆长度之比,一般取1-2。
根据上冲头的行程长度,即可得摇杆的另一极限位置,摇杆的摆角以小于60°为宜。
设计机构时,为了“增力”,曲柄的回转中心可在摇杆活动铰链、垂直于摇杆垂直位置的直线上适当选取,以改善机构在冲头在下极限位置附近放的传力性能。
根据摇杆的三个极限位置(
位置和另一极限位置),设定与之对应的曲柄上个位置,其中对应摇杆的两个位置,曲柄应在于连杆共线的位置,曲柄的另一位置可以根据保压时间来设定,则可根据两连架杆的三组对应位置来设计此机构。
设计完成后,应该检查曲柄的存在条件,若不满足要求,则重新选择曲柄的回转中心。
也可以选择曲柄中心后,根据摇杆两极限位置时曲斌和连杆共线的条件,确定连杆和曲柄的长度,再检查摇杆在垂直位置
时,曲柄对应转角是否满足保压时间要求。
曲柄回转中心据摇杆垂直位置越远,机构行程速比系数越小,冲头在下极限位置附近的位移变化越小,但机构尺寸越大。
在这里我取λ=1.5,得r≤394
r=240mm,冲头行程取100mm,算出摇杆的摆角等于44°。
(2)首先确定摇杆滑块机构中,滑块能运动到的最低点位置,该位置为上冲头所能下降到的极限位置,该位置位于滑块处于的的垂直导路上,然后再根据上冲头行程为100mm推出滑块的另一极限位置,该位置为上冲头所能达到的最高位置,由此时滑块所在的极限位置可推算出摇杆的一个极限位置C3,要干的另一极限位置C1位于铅锤位置左偏2°处。
(3)根据设计20片所需的保压时间为0.3~0.6s之间,要计算出在保压时间内曲柄所转过角度的许用范围,根据之前制定的一分钟产量为20片的生产要求,保压角的范围在36°~72°之间。
(4)在图上取一点D,在D点以r为半径画圆弧,在在圆弧上分别取点C1、C2、C3、C点,使,C在竖直下方,OC1在与OC成2°,OC2与OC成2°
使AC1=396mm,连接AC3,量出AC3=216mm,在C2点以(AC1+AC3)/2(此为杆BC长)=306为半径画圆,在A点以(AC3—AC1)/2=90(此为杆AB长)为半径画圆,两圆交于B2、B1两点,连接AB2、AB1,量出AB2AB1的弧长对应角度为30°*2=60°,满足条件在36°~72°之间。
在设计中,对于曲柄摇杆机构,有L
=90mm,L
=306mm,L
=240mm,L
=348mm,满足曲柄的存在条件:
L
+L
+L
,所以该设计方案及参数设计可行。
(图见附录2示意图)
六、运动循环图设计校核(见附录1与3)
根据以上运动分析,我将附录1中的机器的运动循环图设计校核如下:
1)0°~60°上冲头匀速下降;下冲头在停歇位置上方3mm处静止不动,料筛往复振动,然后向左退回。
2)60°~80°上冲头继续迅速下降;下冲头在60°时开始下沉,在80°时下沉到停歇位置,位移3mm;料筛保持静止不动。
3)80°~135°上冲头继续匀速下降;下冲头在停歇位置处保持静止不动;料筛保持静止不动。
4)135°~145°上冲头继续匀速下降,在145°时停止下降,等待保压;下冲头上升8mm,并且在145°时处于休止位置,等待保压;料筛保持静止不动。
5)145°~207°上,下冲头开始进行保压,保持静止不动;料筛保持静止不动。
6)220°~245°上冲头匀速回升;下冲头在220°时开始匀速上升,位移为16mm,等待料筛到位将成形片坯挤入滑道;料筛在230°时开始向右前进。
7)245°~265°上冲头继续匀速回升;下冲头保持静止不动;料筛在250°时到位,将片坯挤入滑道,之后向左退回。
8)265°~285°~360°上冲头继续匀速上升,360°时上冲头退回至最高处;下冲头在285°处开始向下退回21mm,至带料位置,等待下一周期开始;360°时料筛退回至最左处。
整一周期结束。
七、凸轮机构尺寸计算(见附录3)
基圆半径的确定
根据循环图和公式:
(α<30°,e=0)
化简得:
根据函数单调性只取两点即可判断其
的最大值,在一点其
;s=8;
所以
mm;
另一点
;s=13;
mm;
=
=71.39mm
由于在其他条件不变的情况下基圆半径r越大,则压力角α越小,则越利于传动。
所以我选取r=95mm。
所以我取
=95mm>
,e=0
八、最终设计方案:
8.1上冲头:
冲头的位移和曲柄的转角的关系是配合下冲头盘形凸轮动作和时间,与上下冲头相互配合,而送料机构的动作一部分也是和上冲头配合。
已知上冲头推程为100mm,周转145°冲头由最高点落至最低点,此时下冲头刚好达到最大推程位置,同时在上冲头由最高点落至型腔齐平高度前送料机构完成往复振动筛料的动作并向左位移至最远端。
表8.1.2上冲头和下冲头与送料筛的动作关系
上冲头
进
退
送料筛
退
近休
进
远休
下冲头
退
近休
进
远休
九、心得体会
开始的时候,我还以为课程设计就是像大一时候的工程制图似的画两张A3图纸那样简单。
后来开课后我才知道,原来课程设计并非那么机械的画图,在画图之前必须要自己设计制定方案以及经过许许多多的计算才能得到最优方案。
得知这些以后,我对课程设计有了浓厚的兴趣。
我本人十分喜欢老师给我们作类似的课程设计,因为这不仅可以提起我们对这门课的学习兴趣,同时还可以在专业上用实践锻炼一下我们,使我们不但不在对所学专业感到陌生,而且还可以培养大家的积极性。
我比较喜欢自己动手做一些东西,所以通过课下的时间我学习了UG绘图软件,没想到这次竟然用到了,通过软件绘图的效率比自己动手画要高好多,而且精确,这才是关键,这次的曲柄摇杆机构以及凸轮我都是先用软件画出来测量了精确的数值之后才在图纸上用手绘制的,我感觉这样不仅效率高而且精度高。
在课程设计过程中,我们应该在弄懂原理的前提下慢慢的一步一步的做,我开始就赶着做,结果却越做越忙。
我们做设计不要墨守成规,应该有改良创新的精神。
实际上,在弄懂了实验原理的基础上,我们的时间是充分的,做实验应该是游刃有余的。
我们都知道态度决定一切,你掌握知识的多少也全在自己对待学习的态度。
在设计的过程中我们应该注重培养自己的独立分析问题,和解决问题的能力。
在写画连杆机构的时候有很多不懂,于是去问老师,老师的启发了我,而我也学会了自己独立思考。
通过这次机械原理课程设计,提高了我们综合运用机械原理课程理论的能力,培养了分析和解决一般机械运动实际问题的能力,并使所学知识得到进一步巩固、深化和扩展。
希望以后学校和系里能够开设更多类似的课程,能够让我们得到更好的锻炼。
十、参考文献:
(1)裘建新,机械原理课程设计指导书,2005
(2)申永胜,机械原理教程(第2版),2005
 升级会员
升级会员 