C51通信及芯片应用.docx
《C51通信及芯片应用.docx》由会员分享,可在线阅读,更多相关《C51通信及芯片应用.docx(38页珍藏版)》请在冰豆网上搜索。
C51通信及芯片应用
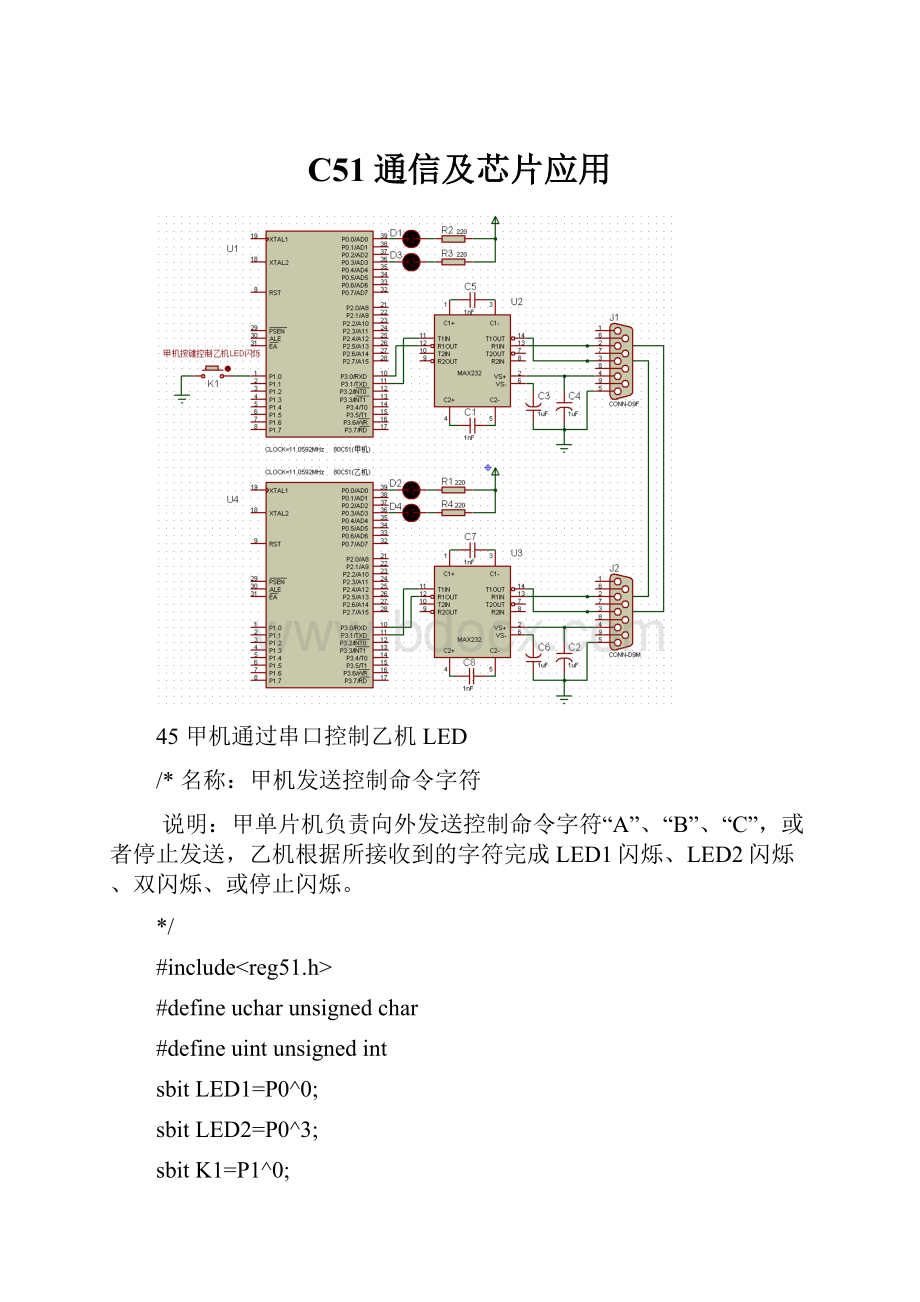
45甲机通过串口控制乙机LED
/*名称:
甲机发送控制命令字符
说明:
甲单片机负责向外发送控制命令字符“A”、“B”、“C”,或者停止发送,乙机根据所接收到的字符完成LED1闪烁、LED2闪烁、双闪烁、或停止闪烁。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitLED1=P0^0;
sbitLED2=P0^3;
sbitK1=P1^0;
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//向串口发送字符
voidPutc_to_SerialPort(ucharc)
{
SBUF=c;
while(TI==0);
TI=0;
}
//主程序
voidmain()
{
ucharOperation_No=0;
SCON=0x40;//串口模式1
TMOD=0x20;//T1工作模式2
PCON=0x00;//波特率不倍增
TH1=0xfd;
TL1=0xfd;
TI=0;
TR1=1;
while
(1)
{
if(K1==0)//按下K1时选择操作代码0,1,2,3
{
while(K1==0);
Operation_No=(Operation_No+1)%4;
}
switch(Operation_No)//根据操作代码发送A/B/C或停止发送
{
case0:
LED1=LED2=1;
break;
case1:
Putc_to_SerialPort('A');
LED1=~LED1;LED2=1;
break;
case2:
Putc_to_SerialPort('B');
LED2=~LED2;LED1=1;
break;
case3:
Putc_to_SerialPort('C');
LED1=~LED1;LED2=LED1;
break;
}
DelayMS(100);
}
}
/*名称:
乙机程序接收甲机发送字符并完成相应动作
说明:
乙机接收到甲机发送的信号后,根据相应信号控制LED完成不同闪烁动作。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitLED1=P0^0;
sbitLED2=P0^3;
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//主程序
voidmain()
{
SCON=0x50;//串口模式1,允许接收
TMOD=0x20;//T1工作模式2
PCON=0x00;//波特率不倍增
TH1=0xfd;//波特率9600
TL1=0xfd;
RI=0;
TR1=1;
LED1=LED2=1;
while
(1)
{
if(RI)//如收到则LED闪烁
{
RI=0;
switch(SBUF)//根据所收到的不同命令字符完成不同动作
{
case'A':
LED1=~LED1;LED2=1;break;//LED1闪烁
case'B':
LED2=~LED2;LED1=1;break;//LED2闪烁
case'C':
LED1=~LED1;LED2=LED1;//双闪烁
}
}
elseLED1=LED2=1;//关闭LED
DelayMS(100);
}
}
46单片机之间双向通信
/*名称:
甲机串口程序
说明:
甲机向乙机发送控制命令字符,甲机同时接收乙机发送的数字,并显示在数码管上。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitLED1=P1^0;
sbitLED2=P1^3;
sbitK1=P1^7;
ucharOperation_No=0;//操作代码
//数码管代码
ucharcodeDSY_CODE[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//向串口发送字符
voidPutc_to_SerialPort(ucharc)
{
SBUF=c;
while(TI==0);
TI=0;
}
//主程序
voidmain()
{
LED1=LED2=1;
P0=0x00;
SCON=0x50;//串口模式1,允许接收
TMOD=0x20;//T1工作模式2
PCON=0x00;//波特率不倍增
TH1=0xfd;
TL1=0xfd;
TI=RI=0;
TR1=1;
IE=0x90;//允许串口中断
while
(1)
{
DelayMS(100);
if(K1==0)//按下K1时选择操作代码0,1,2,3
{
while(K1==0);
Operation_No=(Operation_No+1)%4;
switch(Operation_No)//根据操作代码发送A/B/C或停止发送
{
case0:
Putc_to_SerialPort('X');
LED1=LED2=1;
break;
case1:
Putc_to_SerialPort('A');
LED1=~LED1;LED2=1;
break;
case2:
Putc_to_SerialPort('B');
LED2=~LED2;LED1=1;
break;
case3:
Putc_to_SerialPort('C');
LED1=~LED1;LED2=LED1;
break;
}
}
}
}
//甲机串口接收中断函数
voidSerial_INT()interrupt4
{
if(RI)
{
RI=0;
if(SBUF>=0&&SBUF<=9)P0=DSY_CODE[SBUF];
elseP0=0x00;
}
}
/*名称:
乙机程序接收甲机发送字符并完成相应动作
说明:
乙机接收到甲机发送的信号后,根据相应信号控制LED完成不同闪烁动作。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitLED1=P1^0;
sbitLED2=P1^3;
sbitK2=P1^7;
ucharNumX=-1;
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//主程序
voidmain()
{
LED1=LED2=1;
SCON=0x50;//串口模式1,允许接收
TMOD=0x20;//T1工作模式2
TH1=0xfd;//波特率9600
TL1=0xfd;
PCON=0x00;//波特率不倍增
RI=TI=0;
TR1=1;
IE=0x90;
while
(1)
{
DelayMS(100);
if(K2==0)
{
while(K2==0);
NumX=++NumX%11;//产生0~10范围内的数字,其中10表示关闭
SBUF=NumX;
while(TI==0);
TI=0;
}
}
}
voidSerial_INT()interrupt4
{
if(RI)//如收到则LED则动作
{
RI=0;
switch(SBUF)//根据所收到的不同命令字符完成不同动作
{
case'X':
LED1=LED2=1;break;//全灭
case'A':
LED1=0;LED2=1;break;//LED1亮
case'B':
LED2=0;LED1=1;break;//LED2亮
case'C':
LED1=LED2=0;//全亮
}
}
}
47单片机向主机发送字符串
/*名称:
单片机向主机发送字符串
说明:
单片机按一定的时间间隔向主机发送字符串,发送内容在虚拟终端显示。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//向串口发送字符
voidPutc_to_SerialPort(ucharc)
{
SBUF=c;
while(TI==0);
TI=0;
}
//向串口发送字符串
voidPuts_to_SerialPort(uchar*s)
{
while(*s!
='\0')
{
Putc_to_SerialPort(*s);
s++;
DelayMS(5);
}
}
//主程序
voidmain()
{
ucharc=0;
SCON=0x40;//串口模式1
TMOD=0x20;//T1工作模式2
TH1=0xfd;//波特率9600
TL1=0xfd;
PCON=0x00;//波特率不倍增
TI=0;
TR1=1;
DelayMS(200);
//向主机发送数据
Puts_to_SerialPort("ReceivingFrom8051...\r\n");
Puts_to_SerialPort("-------------------------------\r\n");
DelayMS(50);
while
(1)
{
Putc_to_SerialPort(c+'A');
DelayMS(100);
Putc_to_SerialPort('');
DelayMS(100);
if(c==25)//每输出一遍后加横线
{
Puts_to_SerialPort("\r\n-------------------------------\r\n");
DelayMS(100);
}
c=(c+1)%26;
if(c%10==0)//每输出10个字符后换行
{
Puts_to_SerialPort("\r\n");
DelayMS(100);
}
}
}
48单片机与PC通信
/*名称:
单片机与PC通信
说明:
单片机可接收PC发送的数字字符,按下单片机的K1键后,单片机可向PC发送字符串。
在Proteus环境下完成本实验时,需要安装VirtualSerialPortDriver和串口调试助手。
本例缓冲100个数字字符,缓冲满后新数字从前面开始存放(环形缓冲)。
*/
#include
#defineucharunsignedchar
#defineuintunsignedint
ucharReceive_Buffer[101];//接收缓冲
ucharBuf_Index=0;//缓冲空间索引
//数码管编码
ucharcodeDSY_CODE[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00};
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//主程序
voidmain()
{
uchari;
P0=0x00;
Receive_Buffer[0]=-1;
SCON=0x50;//串口模式1,允许接收
TMOD=0x20;//T1工作模式2
TH1=0xfd;//波特率9600
TL1=0xfd;
PCON=0x00;//波特率不倍增
EA=1;EX0=1;IT0=1;
ES=1;IP=0x01;
TR1=1;
while
(1)
{
for(i=0;i<100;i++)
{//收到-1为一次显示结束
if(Receive_Buffer[i]==-1)break;
P0=DSY_CODE[Receive_Buffer[i]];
DelayMS(200);
}
DelayMS(200);
}
}
//串口接收中断函数
voidSerial_INT()interrupt4
{
ucharc;
if(RI==0)return;
ES=0;//关闭串口中断
RI=0;//清接收中断标志
c=SBUF;
if(c>='0'&&c<='9')
{//缓存新接收的每个字符,并在其后放-1为结束标志
Receive_Buffer[Buf_Index]=c-'0';
Receive_Buffer[Buf_Index+1]=-1;
Buf_Index=(Buf_Index+1)%100;
}
ES=1;
}
voidEX_INT0()interrupt0//外部中断0
{
uchar*s="这是由8051发送的字符串!
\r\n";
uchari=0;
while(s[i]!
='\0')
{
SBUF=s[i];
while(TI==0);
TI=0;
i++;
}
}
05I2C-24C04与蜂鸣器
/*名称:
I2C-24C04与蜂鸣器
说明:
程序首先向24C04写入一段音符,然后读取并播放。
*/
#include
#include
#defineucharunsignedchar
#defineuintunsignedint
#defineNOP4(){_nop_();_nop_();_nop_();_nop_();}
sbitSCL=P1^0;
sbitSDA=P1^1;
sbitSPK=P3^0;
//标准音符频率对应的延时表
ucharcodeHI_LIST[]={0,226,229,232,233,236,238,240,241,242,244,245,246,247,248};
ucharcodeLO_LIST[]={0,4,13,10,20,3,8,6,2,23,5,26,1,4,3};
//待写入24C04的音符
ucharcodeSong_24C04[]={1,2,3,1,1,2,3,1,3,4,5,3,4,5};
ucharsidx;//读取音符索引
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//IIC开始
voidStart()
{
SDA=1;SCL=1;NOP4();SDA=0;NOP4();SCL=0;
}
//IIC停止
voidStop()
{
SDA=0;SCL=0;NOP4();SCL=1;NOP4();SDA=1;
}
//读取应答
voidRACK()
{
SDA=1;NOP4();SCL=1;NOP4();SCL=0;
}
//发送非应答信号
voidNO_ACK()
{
SDA=1;SCL=1;NOP4();SCL=0;SDA=0;
}
//向24C04中写一个字节数据
voidWrite_A_Byte(ucharb)
{
uchari;
for(i=0;i<8;i++)
{
b<<=1;SDA=CY;_nop_();SCL=1;NOP4();SCL=0;
}
RACK();
}
//向指定地址写数据
voidWrite_IIC(ucharaddr,uchardat)
{
Start();
Write_A_Byte(0xa0);Write_A_Byte(addr);Write_A_Byte(dat);
Stop();
DelayMS(10);
}
//从24C04中读一个字节数据
ucharRead_A_Byte()
{
uchari,b;
for(i=0;i<8;i++)
{
SCL=1;b<<=1;b|=SDA;SCL=0;
}
returnb;
}
//从当前地址读取数据
ucharRead_Current()
{
uchard;
Start();
Write_A_Byte(0xa1);d=Read_A_Byte();NO_ACK();
Stop();
returnd;
}
//从任意地址读取数据
ucharRandom_Read(ucharaddr)
{
Start();
Write_A_Byte(0xa0);Write_A_Byte(addr);
Stop();
returnRead_Current();
}
//定时器0中断
voidT0_INT()interrupt1
{
SPK=~SPK;
TH0=HI_LIST[sidx];
TL0=LO_LIST[sidx];
}
//主程序
voidmain()
{
uinti;
IE=0x82;
TMOD=0x00;
for(i=0;i<14;i++)//向24C04写入音符表
{
Write_IIC(i,Song_24C04[i]);
}
while
(1)//反复读取音符并播放
{
for(i=0;i<15;i++)//从24C04中读取音符
{
sidx=Random_Read(i);//从指定地址读取
TR0=1;//播放
DelayMS(300);
}
}
}
11MAX7221控制数码管动态显示
/*名称:
MAX7221控制数码管动态显示
说明:
本例用MAX7221控制8只数码管动态显示,这样大大减少了单片机引脚和机器时间的占用。
*/
#include
#include
#defineucharunsignedchar
#defineuintunsignedint
sbitDIN=P2^0;
sbitCSB=P2^1;
sbitCLK=P2^2;
ucharDisp_Buffer[]={2,0,1,5,10,5,10,9};//显示缓冲,10为“-”
//延时
voidDelayMS(uintms)
{
uchari;
while(ms--)for(i=0;i<120;i++);
}
//写数据
voidWrite(ucharAddr,ucharDat)
{
uchari;
CSB=0;
for(i=0;i<8;i++)
{
CLK=0;Addr<<=1;DIN=CY;
CLK=1;_nop_();_nop_();CLK=0;
}
for(i=0;i<8;i++)
{
CLK=0;Dat<<=1;DIN=CY;
CLK=1;_nop_();_nop_();CLK=0;
}
CSB=1;
}
//MAX7221初始化
voidInitialise()
{
Write(0x09,0xff);//编码模式地址0x090x00~0xff,为1的则位选通
Write(0x0a,0x07);//亮度地址0x0a0x00~0x0f,0x0f最亮
Write(0x0b,0x07);//扫描数码管个数地址0x0b,最多扫描8只数码管
Write(0x0c,0x01);//工作模式地址0x0c0x00:
关闭;0x01:
正常
}
//主程序
voidmain()
{
uchari;
Initialise();//初始化
DelayMS
(1);
for(i=0;i<8;i++)//显示8个数码管
{
Write(i+1,Disp_Buffer[i]);
}
while
(1);
}
12LCD1602字符液晶滚动演示程序
//main.c
/*名称:
LCD1602字符液晶滚动演示程序
说明:
K1~K3按钮分别实现液晶垂直或水平滚动显示及暂停与继续控制。
*/
#include
#include
#defineucharunsignedchar
#defineuintunsignedint
voidInitialize_LCD();
voidDelayMS(uintms);
voidShowString(uchar,uchar,uchar*);
sbitK1=P3^0;
sbitK2=P3^1;
sbitK3=P3^2;
ucharcodePrompt[]="PressK1-K3ToStartDemoProg";
//待滚动显示的信息段落,每行不超过80个字符,共6行
ucharconstLine_Count=6;
ucharcodeMsg[][80]=
{
"ManyCADusersdismissschematiccaptureasanecessaryevilinthe",
"processofcreatingPCBl
 升级会员
升级会员 