牛头刨床机械原理毕业课程设计.docx
《牛头刨床机械原理毕业课程设计.docx》由会员分享,可在线阅读,更多相关《牛头刨床机械原理毕业课程设计.docx(22页珍藏版)》请在冰豆网上搜索。
牛头刨床机械原理毕业课程设计
一、课程设计任务书
1.工作原理及工艺动作过程
牛头刨床是一种用于平面切削加工的机床。
刨床工作时,7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
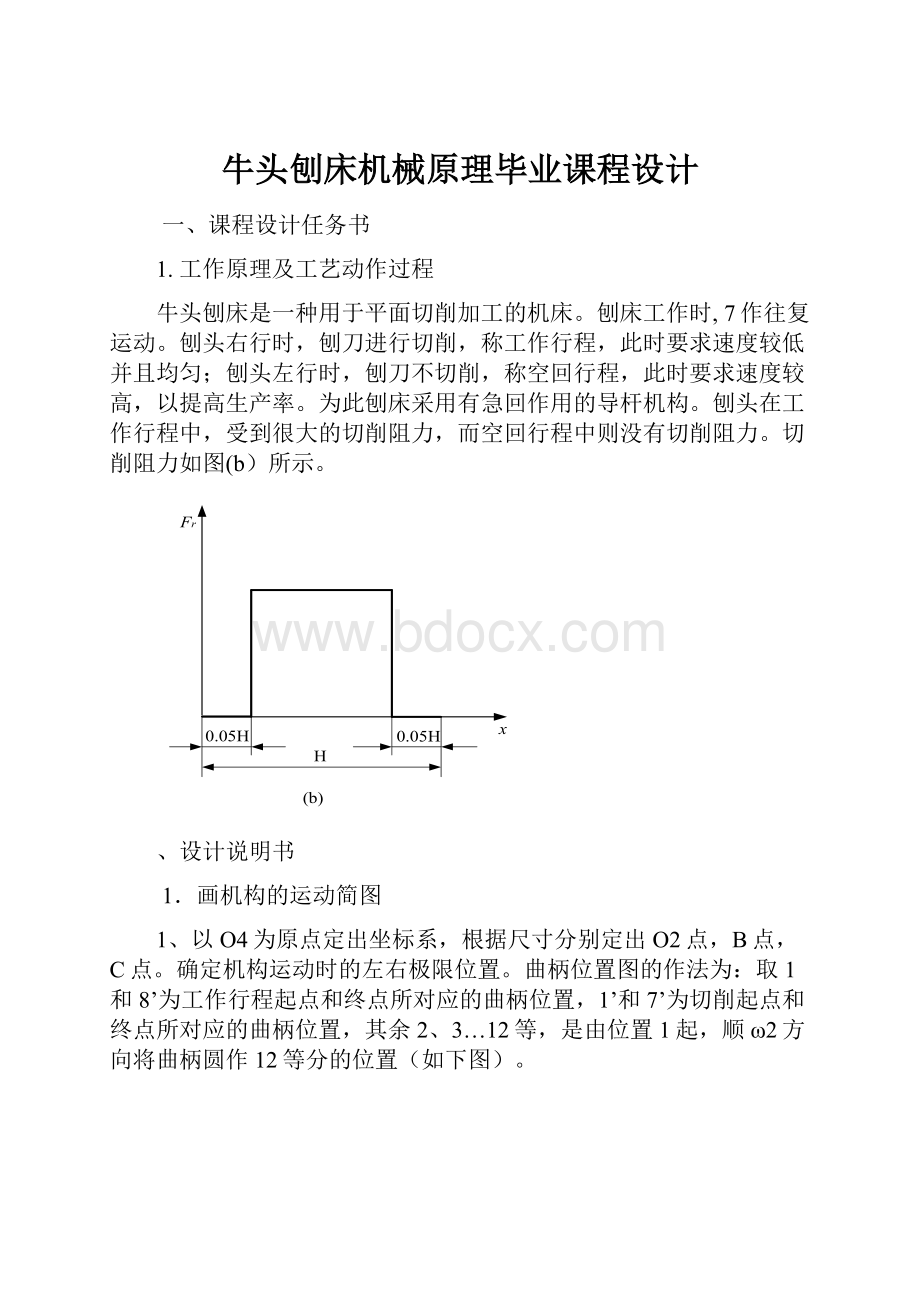
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
切削阻力如图(b)所示。
、设计说明书
1.画机构的运动简图
1、以O4为原点定出坐标系,根据尺寸分别定出O2点,B点,C点。
确定机构运动时的左右极限位置。
曲柄位置图的作法为:
取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2
取第I方案的第4位置和第9位置(如下图1-3)。
图1-3
2.对位置4点进行速度分析和加速度分析
(a)速度分析取速度比例尺=
对A点:
=+
方向:
大小:
?
√?
==
==
==
V=V==
对于C点:
=+
方向:
大小:
?
√?
==
==
==
速度分析图:
图1-4
(b)加速度分析选取加速度比例尺为=
对于A点:
=+=++
方向:
A→A→
大小:
√?
√√?
由于===2=
==已知,
根据加速度图1-5可得:
==,==。
==,==0.363626。
另外还可得出:
==
==
对于C点
=++
方向:
B→C→B
大小:
?
√√?
由==,==已知,
根据根据加速度图可得:
==,==
加速度分析图:
图1-5
3.对位置9点进行速度分析和加速度分析
(a)速度分析取速度比例尺=
对A点:
=+
方向:
大小:
?
√?
==
==
==
V=V==
对于C点:
=+
方向:
大小:
?
√?
==
==
==
速度分析图:
图1-6
(b)加速度分析选取加速度比例尺为=
对于A点:
=+=++
方向:
A→A→
大小:
√?
√√?
由于===2=
==已知,
根据加速度图1-7可得:
==,==
==
另外还可得出:
==
==
对于C点
=++
方向:
B→C→B
大小:
?
√√?
由==,==已知,
根据根据加速度图可得:
==,==
加速度分析图:
图1-7
4.对位置9点进行动态静力分析
取“9”点为研究对象,分离5、6构件进行运动静力分析,作阻力体如图1─8所示。
图1-8
设与水平导轨的夹角为,可测得的大小为
由,
可计算出,
分离3,4构件进行运动静力分析,杆组力体图如图1-9所示
图1-9
已知:
FR54=FR45=303.717328N,G4=200N
由此可得:
FI4=-G4g×a4=-44.99051
根据
,
其中,,,分别为,,,作用于的距离(其大小可以测得),可以求得:
=609.753093N。
作力的多边形如图1-10所示
图1-10
由图1-10可得:
=250.04N
对曲柄2进行运动静力分析,作组力体图如图1-11所示,
图1-11
所以曲柄上的平衡力矩为:
,方向为逆时针。
一、课程设计任务书
1.工作原理及工艺动作过程
牛头刨床是一种用于平面切削加工的机床。
刨床工作时,7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
切削阻力如图(b)所示。
、设计说明书
1.画机构的运动简图
1、以O4为原点定出坐标系,根据尺寸分别定出O2点,B点,C点。
确定机构运动时的左右极限位置。
曲柄位置图的作法为:
取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2
取第I方案的第4位置和第9位置(如下图1-3)。
图1-3
2.对位置4点进行速度分析和加速度分析
(a)速度分析取速度比例尺=
对A点:
=+
方向:
大小:
?
√?
==
==
==
V=V==
对于C点:
=+
方向:
大小:
?
√?
==
==
==
速度分析图:
图1-4
(b)加速度分析选取加速度比例尺为=
对于A点:
=+=++
方向:
A→A→
大小:
√?
√√?
由于===2=
==已知,
根据加速度图1-5可得:
==,==。
==,==0.363626。
另外还可得出:
==
==
对于C点
=++
方向:
B→C→B
大小:
?
√√?
由==,==已知,
根据根据加速度图可得:
==,==
加速度分析图:
图1-5
3.对位置9点进行速度分析和加速度分析
(a)速度分析取速度比例尺=
对A点:
=+
方向:
大小:
?
√?
==
==
==
V=V==
对于C点:
=+
方向:
大小:
?
√?
==
==
==
速度分析图:
图1-6
(b)加速度分析选取加速度比例尺为=
对于A点:
=+=++
方向:
A→A→
大小:
√?
√√?
由于===2=
==已知,
根据加速度图1-7可得:
==,==
==
另外还可得出:
==
==
对于C点
=++
方向:
B→C→B
大小:
?
√√?
由==,==已知,
根据根据加速度图可得:
==,==
加速度分析图:
图1-7
4.对位置9点进行动态静力分析
取“9”点为研究对象,分离5、6构件进行运动静力分析,作阻力体如图1─8所示。
图1-8
设与水平导轨的夹角为,可测得的大小为
由,
可计算出,
分离3,4构件进行运动静力分析,杆组力体图如图1-9所示
图1-9
已知:
FR54=FR45=303.717328N,G4=200N
由此可得:
FI4=-G4g×a4=-44.99051
根据
,
其中,,,分别为,,,作用于的距离(其大小可以测得),可以求得:
=609.753093N。
作力的多边形如图1-10所示
图1-10
由图1-10可得:
=250.04N
对曲柄2进行运动静力分析,作组力体图如图1-11所示,
图1-11
所以曲柄上的平衡力矩为:
,方向为逆时针。
 升级会员
升级会员 