机器人认路doc.docx
《机器人认路doc.docx》由会员分享,可在线阅读,更多相关《机器人认路doc.docx(14页珍藏版)》请在冰豆网上搜索。
机器人认路doc
第7课机器人认路
我们已经学习过机器人的“眼睛”——光敏传感器,机器人还有另一种眼睛——地面灰度传感器,用它能做些什么呢?
学习任务
本节课将学习灰度传感器的结构组成和在实际生活中的某些简单应用;通过活动,学习地面灰度检测方法;理解实现机器人循迹行走的三种方法。
引导路径
机器人可以利用光敏传感器、红外传感器实现类似人眼的功能,此外,地面灰度传感器也是机器人一种眼睛,利用它可以检测环境颜色的灰度,从而可以认路。
通过机器人认路学习实现机器人循迹行走的三种方法。
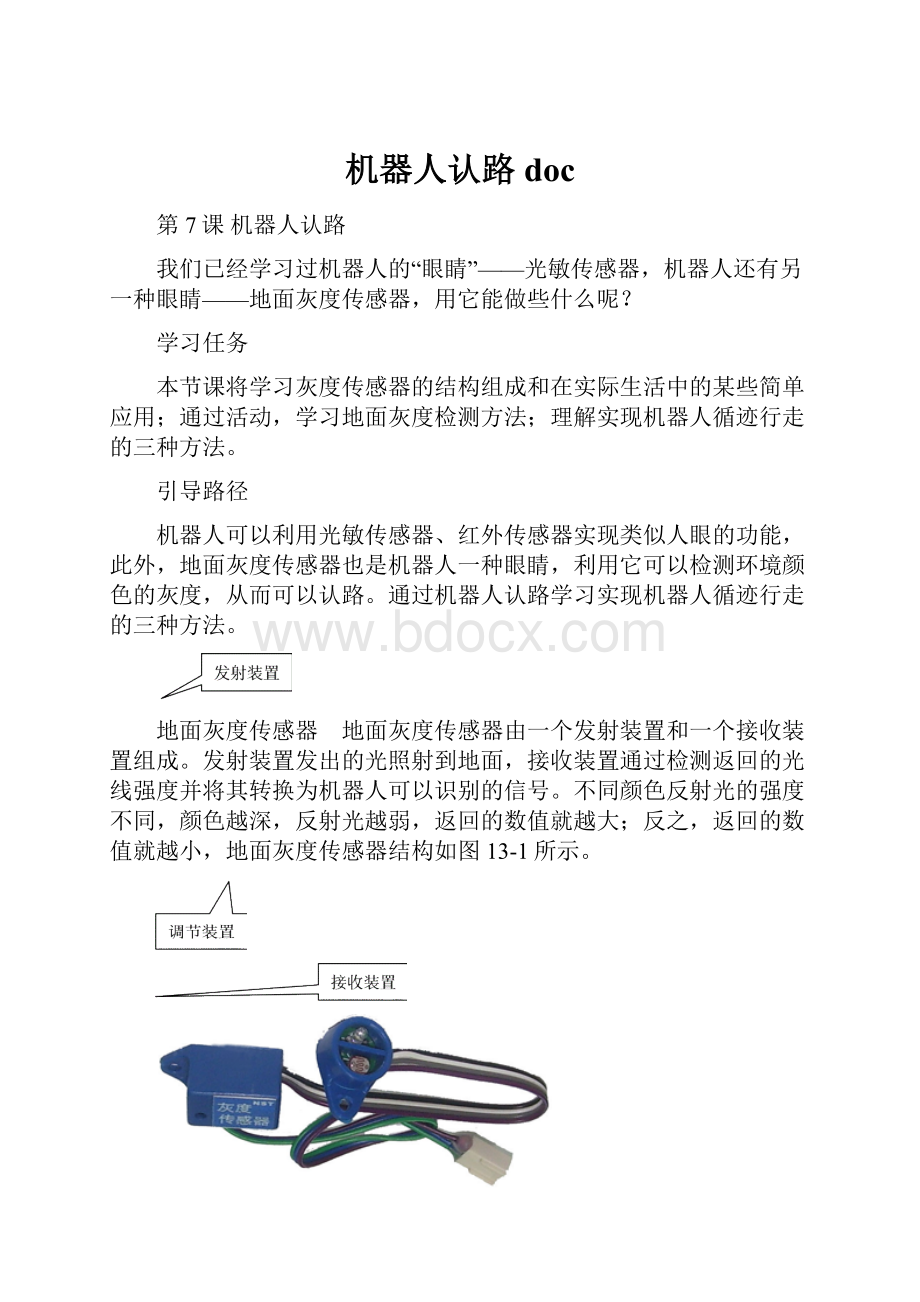
地面灰度传感器 地面灰度传感器由一个发射装置和一个接收装置组成。
发射装置发出的光照射到地面,接收装置通过检测返回的光线强度并将其转换为机器人可以识别的信号。
不同颜色反射光的强度不同,颜色越深,反射光越弱,返回的数值就越大;反之,返回的数值就越小,地面灰度传感器结构如图13-1所示。
图7-1灰度传感器结构示意图
灰度传感器的调节灰度传感器上无信号指示灯,检测给定的颜色灰度时,可以将发射、接收头置于给定颜色处,配合调节装置即可调出合适的返回值。
将调节装置逆时针旋转,获取的数值变大;顺时针旋转,获取的数值变小,直到数值合适为止。
如果需要准确的数值,可以利用程序进行控制,使其在液晶屏幕上显示,配合调节装置即可调出准确的量。
许多城市都建有盲人专用通道,如果能设计一个认路机器人,让机器人沿着专用通道带领着盲人去医院、商场、公园等地,将为盲人朋友提供很大的方便,那么认路机器人该怎样设计呢?
实现方法分析机器人利用地面灰度循迹最常见的三种方法是:
只有一个地面灰度传感器时采用沿线法,机器人行走路线是一个个连续的圆弧;有两个地面灰度传感器时采用骑线法实现,安装两个地面灰度传感器之间的距离应比轨迹线的宽度大,机器人行走的路线似蛇形;用三个地面灰度传感器可采用压线法,在骑线法的基础上,在机器人的底部中间位置安装一个灰度传感器,机器人行走的时候,中间的灰度传感器一直压线行驶,如图7-2所示。
黑色线:
为地面标示线
绿色线:
机器人行走轨迹
红色色块:
灰度传感器位置
沿线法骑线法压线法
图7-2机器人循迹行走的三种方法
单地面灰度沿线法
机器人行走分析:
当机器人的灰度传感器检测黑线时,说明机器人的行驶已经靠左了,则机器人右转;如果机器人的灰度传感器检测白线时,说明机器人的行驶已偏右,则让机器人左转。
检测地面灰度并把黑色的预设值大于180,白色值为80左右,在程序设计时,取80-180的中间值130作为判断黑白色的条件,即灰度传感器测得的值小于130,则是白色;测得的值大于130,则为黑色。
在机器人底部左侧安装一个地面灰度传感器并固定好且离地面5mm~10mm,左侧传感器接口接在模拟口4上。
打开编程软件,拖拽“条件循环”到流程图区“主程序”下并设置为“永远循环”,拖拽“条件判断”到永远循环体内。
双击“条件判断”,设置增加条件模拟输入大于130。
拖拽“移动”,放置在“条件判断”的“YES”分支下,设置向右转;拖拽“移动”到“条件判断”的“NO”分支下,并设置向左转。
也就是把灰度传感器检测到白色向左转,当灰度没有检测到黑色时,机器人右转,这样机器人一直走蛇形路线。
直到终点为止,如图7-3所示。
双地面灰度骑线法
在机器人底部左右两侧安装两个地面灰度传感器并固定好且离地面5mm~10mm,左、右两侧传感器接口分别是模拟口4、3。
图7-3单灰度传感器寻迹流程图
打开编程软件,拖拽“条件循环”到流程图区“主程序”下并设置为“永远循环”,拖拽“条件判断”到永远循环体内。
双击“条件判断”,设置模拟输入口3变量大于130时(如单灰度传感器检测方法,取80和180的中间值130作为判断黑白色的条件),拖拽“移动”到“条件判断”的“YES”分支下,设置移动为“向右转”;当右侧地面灰度检测到黑线,机器人右转
拖拽“条件判断”到第一个“条件判断”NO分支里,双击第二个“条件判断”,设置变量模拟输入口4的值大于130,拖拽“移动”模块到第二个“条件判断”YES分支里,并设置为向左转。
拖拽“移动”模块到第二个“条件判断”到NO分支里,设置该“移动”模块左右电机值各为30。
当机器人左侧检测到黑线机器人向右转,如果左、右两侧都没有检测到黑线,那么这时机器人正行驶在黑线的正上方,则直行,如图7-4所示。
图7-4骑线法流程图图7-5压线法流程图
三个地面灰度压线法
在骑线法的基础上,在机器人的中部安装第三只地面灰度传感器,左、中、右三个地面灰度传感器分别连接主机模拟口5、4、3上并连接正确。
在放置机器人的时候,把中间的灰度传感器压在黑线上,左右两侧的灰度传感器分别位于黑线两侧。
打开机器人编程软件,拖拽“条件循环”到“主程序”里,并设置为“永远循环”。
拖拽“条件判断”到“永远循环”内,双击“条件判断”并进行设置,增加条件模拟口4变量大于130,再选择增加条件模拟口3变量小于130,当单击增加条件时,弹出窗口“和”或“或者”,选择“和”,同样增加模拟口5变量小于130,选择“和”,拖拽“移动”到“条件判断”的“YES”分支下,并设置为“前进”,也就是当中间的灰度检测到黑线且同时满足左右两侧检测的是白色时直行。
拖拽“条件判断”到第一个“条件判断”的“NO”分支下并设置,增加条件当模拟口5变量大于130,拖拽“移动”并设置为“向左转”。
当左侧检测到黑线时,机器人向左转。
拖拽“条件判断”到第二个“条件判断”的“NO”分支下并设置,增加条件当模拟口3变量大于130,拖拽“移动”并设置为“向右转”。
当机器人检测到黑线时,机器人向右转。
机器人安装
第一步:
按第3课将机器人安装好
第二步:
灰度传感器的安装
图7-6
注意:
传感器半径调节为3.
图7-7
装上两个灰度传感器,左边端口为5,右边为4.
场地编辑
这个场地涉及到地面黑线纹理,我们现在widows自带的画图工具面要把场地的黑线先画好。
1)点击图像—属性将宽度和高度都设置为300像素。
图7-8
2)在画图区画好所需要的黑线,注意线条粗细选择第二种比较合理。
图7-9
画好后,图片另存为JPEG格式
图7-10
3)将画好的图复制到仿真安装文件里面map文件夹里面
图7-11
4)打开仿真,进入场地编辑,在场地上任意位置点击右键选择属性,在右边中间有个地面纹理选项,在下拉菜单里选择刚复制到map文件夹里面的图片。
图7-12
添加起始点
图7-13
5)程序设计
图7-14
左边传感器看到黑线,机器人左转,右边看到黑线机器人右转,否则往前走。
6)进入仿真
图7-15
地面灰度值的说明:
仿真里对灰度传感器值的测量进入机器人编辑,点仿真工具,即可弹出仿真工具对话框
图7-16
各显神通
1.举例说明,机器人的主要功能有哪些?
2.机器人时装表演队,沿着直径为一米的圆进行时装表演,圆周为1cm宽的黑线,试分别用单灰度和双灰度地面传感器来编程序,让机器人沿着黑线行走。
博弈舞台
1.用地面灰度传感器实现鸭妈妈领鸭宝宝过桥。
要求,鸭妈妈带领着鸭宝宝过桥且鸭妈妈与鸭宝宝均不能掉入河中,请分别设计鸭妈妈及鸭宝宝的机器人程序。
2.试通过地面灰度传感器设计机器人巡逻程序。
成长基石
1.你对机器人认路程序的理解是否有困难?
2.你知道永远循环和条件循环在程序执行过程中有什么不同?
3.请说出你对本节课的学习体会,有什么心得可以记下来。
资源视窗
“或”、“与”关系
在设置“条件判断”模块的条件时,如果已经设置一个条件,再增加一个条件,会自动弹出条件间关系的设置对话框。
依据需要,选择相应的逻辑关系即可。
“或”关系:
表示两个条件中有一个成立,则条件成立。
“与”关系:
表示两个条件都成立,则条件成立。
 升级会员
升级会员 