大小球分拣传送机械PLC控制梯形图的设计与调试.docx
《大小球分拣传送机械PLC控制梯形图的设计与调试.docx》由会员分享,可在线阅读,更多相关《大小球分拣传送机械PLC控制梯形图的设计与调试.docx(14页珍藏版)》请在冰豆网上搜索。
大小球分拣传送机械PLC控制梯形图的设计与调试
引言
本课程设计主要对PLC程序的结构、特点、各器件的性能以及对被公职对象的控制过程进行具体研究,并通过PLC来实现对大小球分拣系统的控制,随着工业自动化、机械化进程的加速,自动控制正在逐步取代传统的人工控制,在改善工作人员的工作环境的同时也使生产效率大大提升,为了最大限度的满足被控制对象和生产过程的控制。
在本课程设计中对于一些原来用继电接触器线路不易实现的要求,试用PLC后,将很容易实现。
在满足控制要求前提下,采用多种控制模式来对被控制对象进行安全可靠的控制操作,使功能更加全面,其中包括手动控制,自动控制模式,使其操作更强,便于企业各类人员操作,另外,该系统的手动控制模式,也使生产设备的检测和维护更加方便。
关键字PLC,大小球分拣,机械臂
第一章课程设计要求及任务
1.1设计要求
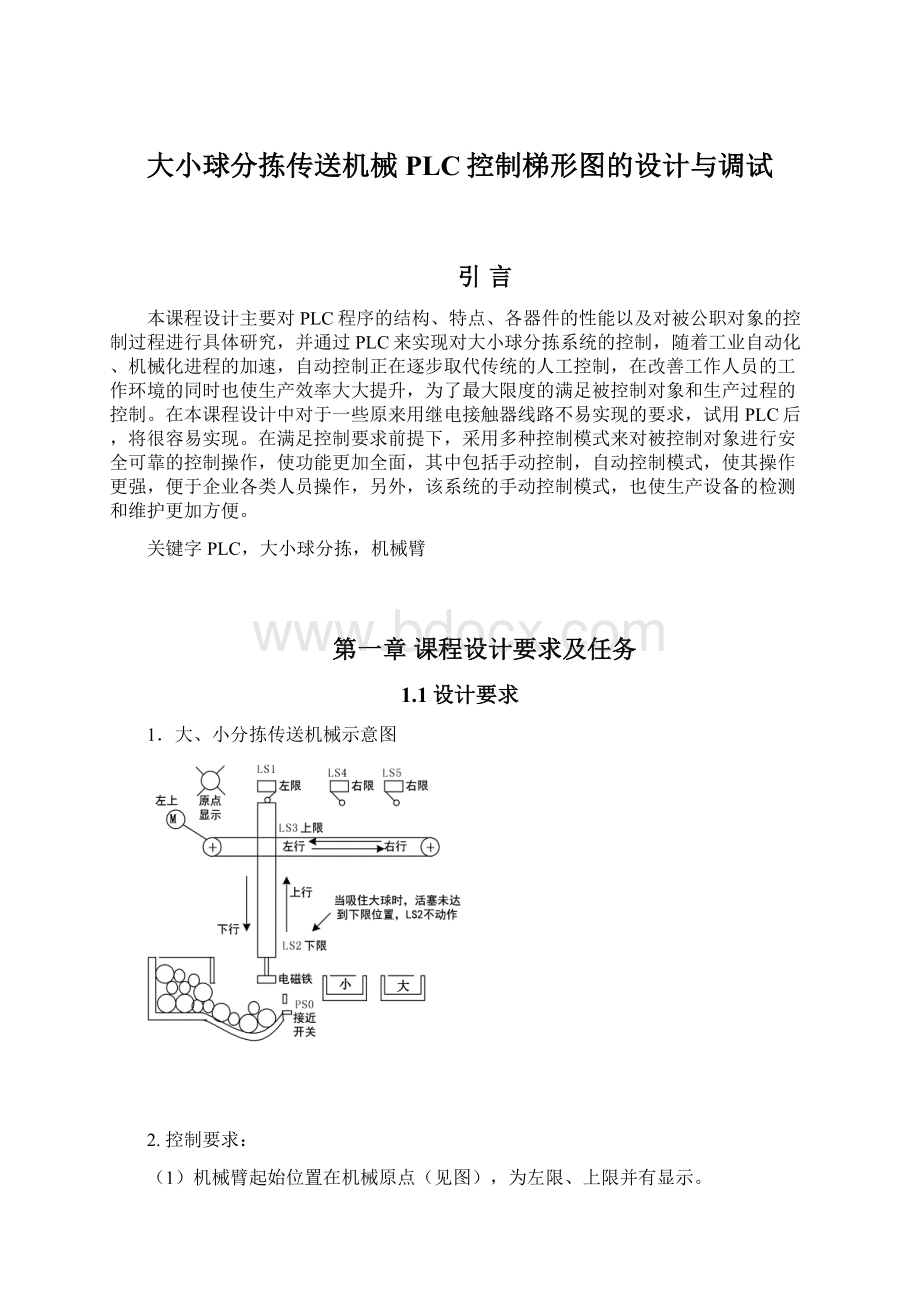
1.大、小分拣传送机械示意图
2.控制要求:
(1)机械臂起始位置在机械原点(见图),为左限、上限并有显示。
(2)有起动按钮和停止按钮控制运行,设停止时机械臂必须已回到原点。
(3)起动后,机械臂动作顺序为:
下降→吸球→上升(至上限)→右行(至右限)→下降→释放→上升(至上限)→左行返回(至原点)。
(4)机械臂右行时有小球右限(LS4)和大球右限(LS5)之分;下降时,当电磁铁压着大球时,下限开关LS2断开(=“0”);压着小球时,下限开关LS2接通(=“1”)。
1.2设计任务
1、根据控制要求,进行电气控制系统硬件电路设计,包括主电路、控制电路及PLC硬件配置电路。
2、根据控制要求,编制PLC应用程序。
3、编写设计说明书,内容包括:
①设计过程和有关说明。
②基于PLC的电气控制系统电路图。
③PLC控制程序(梯形图和指令表)。
④电器元器件的选择和有关计算。
⑤电气设备明细表。
⑥参考资料、参考书及参考手册。
⑦其他需要说明的问题,例如操作说明书、程序的调试过程、遇到的问题及解决方法、对课程设计的认识和建议等。
第二章系统总体方案设计
2.1大、小球分拣传送机械系统的功能
大小球分拣传送机械的控制功能要求为:
1)原位:
机械手原始状态为左上角原位处,即上限开关LS3及左限开关LS1压合,同时机械手处于放松状态和球槽内有球(接近开关PS吸合),这时原位显示亮,表示准备就绪。
2)按下启动按钮SB1后,机械手下降,经过2s后机械手一定会碰到球。
如果同时碰到下限开关LS2,则一定是小球;如果此时未碰到下限开关LS2,则一定是打球。
3)机械手吸住球后就提升,碰到上限开关LS3后就右行。
4)如果是小球,则右行到LS4处;如果是大球,则右行到LS5处。
5)机械手下降,当碰到下限开关LS2时,将小球释放到小球容器中;如果是大球,则释放到大球容器中。
6)释放后机械手提升,碰到上限开关LS3后,左行。
7)左行至碰到左限开关LS1时停下来,至此,一个工作循环结束。
2.2大、小球分拣传送机械系统的结构
大小球分拣传送机械的工作示意图如图2-1所示。
图2-1大小球分拣传送机械的工作示意图
2.3大、小球分拣传送机械的设计思想
当输送机处于起始位置时,上限位开关和左限位开关被压下,极限开关断开。
启动装置后,捡球装置下行,一直到极限开关闭合。
此时。
若碰到的是小球,则压力传感器仍为断开状态;若碰到的是大球,则压力传感器闭合状态。
吸起小球后,则捡球装置向上行,碰到上限位开关后,捡球装置向右行;碰到右限位开关(小球的右限位开关)后,再向下行,碰到下限位开关后,将小球释放到小球箱里,然后返回到原位。
如果吸起的是大球,捡球装置右行碰到另一个右限位开关(大球的右限位开关)后,再向下行,碰到下限位开关后,将大球释放到小球箱里,然后返回到原位。
2.4主电路设计
大、小球分拣传送实质上是由电动机控制的机械臂完成,其主电路就是电动机的正反转电路。
主电路电路图如图2-2所示。
主电路采用两个电动机、四个接触器即正转接触器QA1(QA3)和反转接触器QA2(QA4)控制。
当接触器QA1(QA3)的三对主触头接通时,三相电源的相序按U―V―W接入电动机。
当接触器QA1(QA3)的三对主触头断开,接触器QA2(QA4)的三对主触头接通时,三相电源的相序按W―V―U接入电动机,电动机就向相反方向转动。
利用两台电动机的正反转,分别控制机械臂的上、下、左、右行。
图2-2主电路电路图
2.5确定I/O信号数量,选择PLC的类型
对于开关量控制系统的应用系统,当对控制要求不高时,可选用小型PLC(如西门子公司S7-200系列PLC或OMON公司系列CPM1A/CPM2A型PLC)就能满足要求,如对小型泵的顺序控制、单台机械的自动控制等。
对于以开关量控制为主,带有部分模拟量控制的应用系统,如对工业生产中常遇到的温度、压力、流量、液位等连续量的控制,应选用带有A/D转换的模拟量输入模块和带有D/A转换的模拟量输出模块,配接相应的传感器、变送器和驱动装置,并且选择运算功能较强的中小型PLC,如西门子公司的S7-300系列PLC或OMRON公司的COM/CQM1H型PLC。
对于比较复杂的中大型控制系统,如闭环控制、PID调节、通信联信网等,可选用中大型PLC(如西门子公司的S7-400系列PLC或OMRON公司的C200HE/C200HG/C200HX、CV/CVM1等PLC)。
当系统的各个控制对象分布在不同的地域时,应根据各部分的具体要求来选择PLC,组成一个分布式的控制系统。
PLC的结构分为整体式和模块式两种。
整体式结构把PLC的I/O和CPU放在一块电路板上,省去插接环节,体积小,每一I/O点的平均价格比模块式的便宜,适用于工艺过程比较稳定、控制要求比较简单的系统。
模块式PLC的功能扩展,I/O点数的增减,输入与输出点数的比例,都比整体式灵活。
维修更换模块、判断与处理故障快方便,适用于工艺过程变化教多、控制要求复杂的系统。
在使用时,应按实际具体情况进行选择。
根据系统分析得输入点有13个,分别为I0.0-I1.4;输出点有5个,分别为Q0.0-Q0.4I/O点共16个。
结合以上几点,在设计PLC机械手在大小球分选系统中用的PLC的选型为西门子S7-200系列的可编程控制器(CPU--224)PLC。
2.6确定电器元件I/O分配表
S7—200系列(CPU--224)PLC有14DI/10DO,本次设计只需13个输入,5个输出,具体I/O分配表如表2-1。
输入地址
对应的外部设备
输出地址
对应设备的操作
I0.0
设备的启动按钮
Q0.0
机械臂上升
I0.1
上移限位开关
Q0.1
机械臂下降
I0.2
下移限位开关
Q0.2
机械臂左行
I0.3
左移限位开关
Q0.3
机械臂右行
I0.4
大小球的选择开关
Q0.4
机械臂吸球/放球
I0.5
小球的选择开关
定时器
定时时间
I0.6
大球的限位开关
T37
2S
I0.7
设备的停止按钮
T38
2S
I1.0
连续运行按钮
I1.1
单周期运行按钮
I1.2
单不运行按钮
I1.3
回原点运行
I1.4
单步运行的辅助按钮
表2-1I/O分配表
2.7控制系统的接线图
由PLC控制继电器线圈来控制主电路的上下左右运动和机械臂抓释小球.PLC控制继电器和电灯的输出,从而控制主电路。
采用S7—200系列(CPU--224)PLC,输入端分两组共十四个接口,输出端共四个接口,具体如图2-3。
图2-3机械臂分拣大、小球控制的I/O接线图
第三章控制系统设计
3.1大、小球分拣传送机械的运行流程
根据要求,该控制流程根据吸住的是(大球、小球)有两个分支,此处应为分支点,且属于选择性分支。
分支在机械臂下降之后根据接近开关的通断,分别将球吸住、上升、右行到LS4或LS5处下降,此处应为汇合点。
然后再释放、上升、左移到原点。
1)当按下SM0.1时,M0.0得电,如果转换条件满足,M0.1得电捡球装置下降捡球平板.
2)当下降的捡球平板碰到下限开关LS2时,M0.2得电,停止下降,捡球装置给平板处的电磁线圈(QA)通电,捡球平板产生电磁吸力吸住钢球.
3)此时压力感应器I0.4用来判断是吸住的大球还是小球.
4)如果压力感应器I0.4的输出断开,说明吸住的是小球,而如是闭合的,则说明吸住的是大球。
5)当吸住钢球后,M0.3得电捡球平板上升,碰到上限开关后开始右行,I0.5为小球位限位开关,I0.6为大球位限位开关,在右行的过程中,如果吸住的是大球,M0.6得电,则要到碰到I0.6才停止右行,M0.7得电,下降到下限开关位置,M1.0得电,断电释放钢球,然后M1.0得电上升到上限开关位置停止上升,M1.2得电,开始左行,碰到左极限停止左行;而如果是吸住的小球,则在右行的时候碰到I0.5就停止右行,M0.7得电,下降到下限开关出停止下行,M1.0得电,断电释放钢球,
6)然后上升到上极限位置停止上升,M1.2得电,开始左行,到左极限停止左行,吸球时间T37为2s,释放球时间T38也为2s)
7)当将旋钮开关I1.0后,系统由开始捡球到放球,返回再次开始捡球,如此循环不断的进行捡球和放球的过程,直到按下停止按钮,系统才停下来不工作。
8)当系统在连续运行时,停止方式有两种,一种是正常停止:
就是按下停止按钮后,系统要将整个周期剩下的步骤全部进行完,然后回到原点才停止工作。
另外一种是紧急停止:
就是用来处理紧急情况下来及时停止整个系统工作的,一按紧急停止,系统立刻停止,不管已经工作到什么位置。
3.2大、小球分拣传送机械控制程序流程图
3.3大、小球分拣传送机械控制程序的梯形图
3.4大、小球分拣传送机械控制程序的语句表
//网络1程序启动
LDSM0.1
SM0.0,1
//网络2机械手回到原点判断
LDM0.0
AI0.0
AI0.1
AI0.3
ANM2.0
SM0.1,1
//网络3机械手下行判断
LDM0.1
AI0.2
ANM2.0
SM0.2,1
RM0.1,1
TONT37,20
//网络4大小球选择延时2s(小球)
LDM0.2
AT37
ANI0.4
ANM2.0
SM0.3,1
RM0.2,1
//网络5机械手上行判断
LDM0.3
AI0.1
ANM2.0
SM0.4,1
RM0.3,1
//网络6机械手右行至小球判断
LDM0.4
AI0.5
ANM2.0
SM0.7,1
RM0.4,1
//网络7大小球选择(大球)
LDM0.2
AT37
AI0.4
ANM2.0
SM0.5,1
RM0.2,1
//网络8机械手上行判断
LDM0.5
AI0.1
ANM2.0
SM0.6,1
RM0.5,1
//网络9机械手右行至大球判断
LDM0.6
AI0.6
ANM2.0
SM0.7,1
RM0.6,1
//网络10小球机械手下行判断
LDM0.7
AI0.2
ANM2.0
SM1.0,1
RM0.7,1
TONT38,20
//网络11延时2s
LDM1.0
AT38
ANM2.0
SM1.1,1
RM1.0,1
//网络12机械手左行返回判断
LDM1.1
AI0
 升级会员
升级会员 