实验六XRC工业机器人.docx
《实验六XRC工业机器人.docx》由会员分享,可在线阅读,更多相关《实验六XRC工业机器人.docx(11页珍藏版)》请在冰豆网上搜索。
实验六XRC工业机器人
机器人实验指导书
机器人控制实验以XRC型Motorman工业机械人为基本实验设备,通过实验,使学生认识和了解工业机器人的基本结构和组成。
初步掌握对机械手的编程和控制方法。
本机械手系统是实际应用于工业自动化生产中的先进设备,其控制器设计曾在国际上获奖。
学生在实验中了解应用这套系统,可使学生在诸多方面获益。
实验一XRC型工业机械手的认识
一、 实验目的
本实验介绍XRC型机器人系统的组成结构,XRC控制器的结构与功能,使学生能对机械手系统有总体的了解。
二、 机械手系统结构与功能介绍
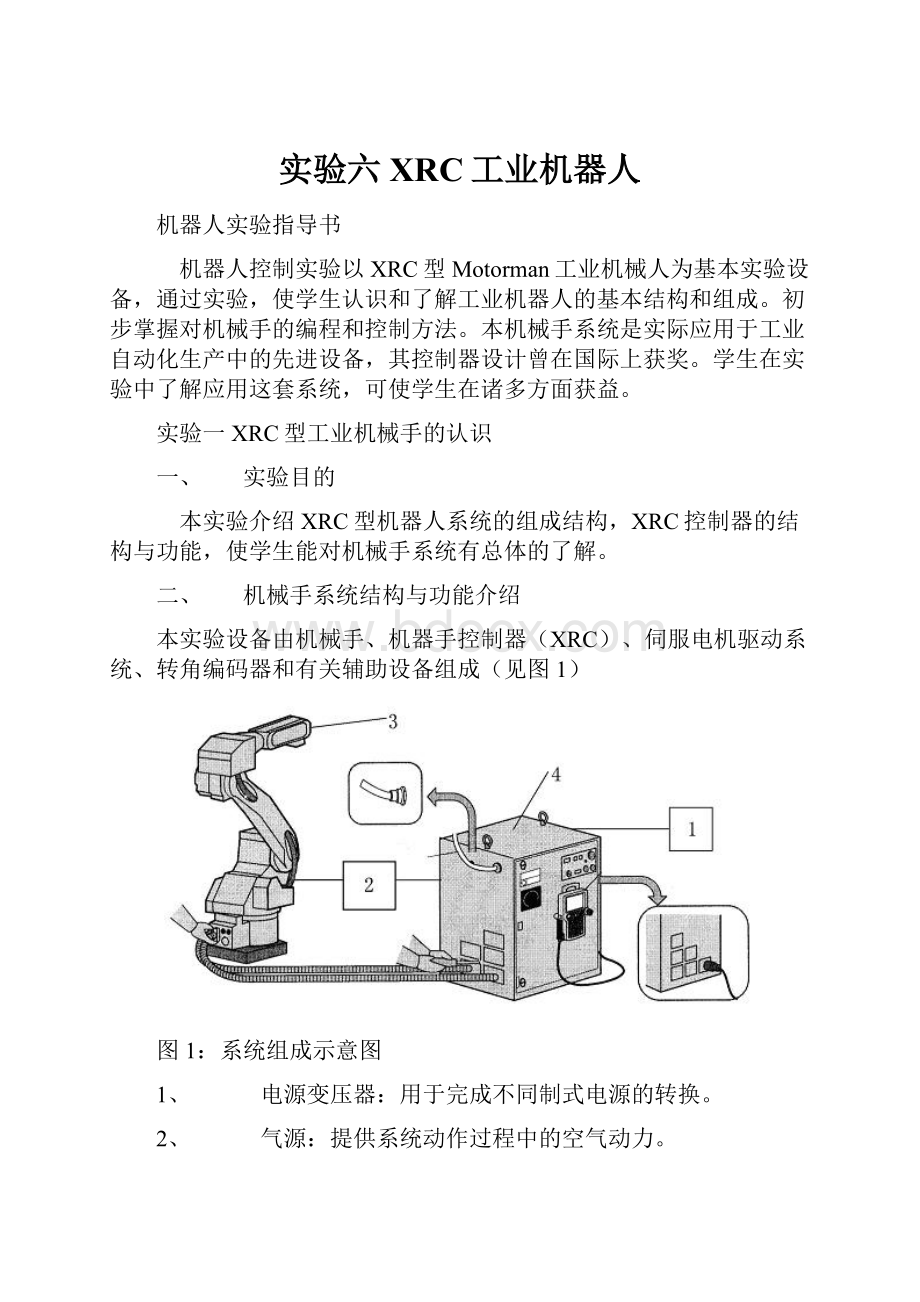
本实验设备由机械手、机器手控制器(XRC)、伺服电机驱动系统、转角编码器和有关辅助设备组成(见图1)
图1:
系统组成示意图
1、 电源变压器:
用于完成不同制式电源的转换。
2、 气源:
提供系统动作过程中的空气动力。
3、 机械手:
机械手是一台六自由度的工业机器人。
结构见图2。
图2:
轴系动作示意图
机械手的每一轴都由伺服电机驱动。
轴上安装转角编码器,可以随时检测每轴的运动位置,使其工作精度高,又相当灵巧。
1、 机器人要完成的各种操作的控制命令都是由这里发出的。
XRC控制器的组成见图3。
图3 控制箱
XRC控制器的重要组成部分是回放板和编程板,下面分别介绍。
(1) 回放板(playbackpanel)
回放板上按键布置与名称见图4。
图 4
图5 手持控制器
图6 图7
(2) 编程器(ProgrammingPendant)
编程器用于对机械手工作任务的编程示教及测试操作,由多种按键及显示屏组成,结构见图5。
显示屏显示区介绍:
见图6.
(上电后的显示画面)主菜单显示见图7.
三、 实验步骤
1、首先由实验指导教师介绍机器人系统的基本组成。
2、然后开机,应用编程器的示教模式对机器人进行人工控制。
(1) 开机
接通主电源,系统完成初始化。
回放板上示教指示灯亮,编程器进入主菜单界面。
(2) 接通伺服电源:
按下回放板上[SERVOONREADY]按钮,其上绿色指示灯闪烁,编程器上[SERVOONREADY]指示灯也闪烁。
表明系统可以进入工作状态。
(3) 示教锁定
按下编程器上的示教锁按键[TEACHLOCK]示教锁定使机器人只能受示教操作的控制,而不会因回放板或其它外部输入的信号而产生误操作。
(4) 按下[DEADMAN]开关,接通伺服电源。
3、对机器人的六轴进行操纵,使同学们初步了解编程器、回放板的功能及机器人的空间运动。
机器人系统可以采用不同的坐标进行工作:
本实验中只采用关节坐标。
见图2
其它几种坐标系见图8
图8
4、机器人六轴运动控制(参见图2)
1) S轴+-
2) L轴+-
3)U轴+-
4)R轴+-
5)B轴+-
6)T轴+-
7)组合运动
四、实验结果
画机器人机构运动简图。
五、 注意事项
(1) 参加实验的同学在示教操作前一定要站在机器人工作区域之外的安全地带,实验过程中不要随意走动,以防意外发生。
(2) 机器人各轴运动不应超越其极限位置,实验操作中注意系统的警示,并使该轴脱离报警位置。
(3) 学生在实验教师指导下操作。
实验二机器人示教与再现控制
一、 实验目的:
通过实验使学生学习机器人示教编程和自动回放运行。
二、 示教再现
1.开机
2.示教准备工作
3.示教锁定
4.调用一个旧任务:
在主菜单下,选择[JOB]——→[SELECTJOB]
屏幕显示文件列表,选择FHR2,系统进入任务内容显示,给出该程序的全部指令。
程序FHR2
J:
FHR2 S:
000R1 TOOL:
*
000NOP ;空操作
001SETB000 ;起始。
程序均以NOP开头,以END结束,置变量B000的初值为0。
002*BB ;标号*BB
003MOVJVJ=20.00
004MOVJVJ=10.00
005MOVJVJ=20.00
006DOUTOT#
(2)ON ;合上
007DOUTOT#
(1)OFF
008TIMERT=3.00 ;程序暂停时间为0.01*3分
009DOUTOT#
(1)ON ;打开
010DOUTOT#
(2)OFF
011INCB000 ;变量B000增1
012JUMP*BBIFB000〈=6 ;当B000〈=6时,跳到*BB循环
013END ;结束行
(1) 指令的测试
程序中的MOV类指令可以用[BWD]和[FWD]单步测试。
将光标移动到待测指令,按下[FWD]或[BWD]。
[BWD]和[FWD]只能测试MOV类指令。
当同时按下[INTERLOCK]和[FWD],所有指令都被执行。
(2) 测试执行
将光标移动到NOP行,按下[INTERLOCK]和[TESTSTART],程序将被执行一遍。
(3) 自动回放执行
示教中已经调试好的任务,可以采用回放方式自动执行。
回放时,开机步骤与前面相同,系统初始化后,进行以下操作:
(4) 从编程器上调出要回放的任务。
(5) 关闭[TEACHLOCK],打开回放板上的PLAY开关。
指示灯亮。
(6) 按下[SERVOONREADY],是其灯闪烁,接通伺服电源。
(7) 按下[START]开关,机器人开始执行调用的任务,程序执行过程中[START]灯一直亮着,程序执行完[START]灯熄灭。
5.创建一个新任务
(8) 任务创建
在主菜单下,见图9所示,选择[JOB],再选择[NEWJOBCREATE],按系统提示起任务名,按[EXEC]确认,进入工作内容显示,系统自动给出编辑显示:
(见图10)
图9 图10
将光标移动到适当行,可以开始新任务的设置。
下面以程序FHR2程序各条指令为例说明新任务的创建方法。
001SETB000 ;按下[INFORMLIST],选择ARITH,选择SET指令,修改参数,插入
002*BB ;按下[INFORMLIST],选择ARITH,选择LABEL输入语句标号,插入
003MOVJVJ=20.00;按下[MOTIONTYPE],修改速度参数,插入
004MOVJVJ=10.00
005MOVJVJ=20.00
006DOUTOT#
(2)ON ;按下[INFORMLIST],选IN/OUT
007DOUTOT#
(1)OFF ;选[OUT],修改参数,插入
008TIMERT=3.00 ;按TIMER,修改TIMER参数,插入
009DOUTOT#
(1)ON
010DOUTOT#
(2)OFF
011INCB000 ;按下[INFORMLIST],选择ARITH,INC,修改参数插入
012JUMP*BBIFB000〈=6 ;按下[INFORMLIST],选择CONTROL,选JUMP,设置跳转条件,插入
013END
(1) 测试执行:
将光标移动到NOP行,按下[INTERLOCK]和[TESTSTART],程序将被执行一遍。
(2) 回放执行:
示教中已经调试好的任务,可以采用回放方式自动执行。
回放时,开机步骤与前面相同,系统初始化后,进行以下操作:
1)从编程器上调出要回放的任务。
2)关闭[TEACHLOCK],打开回放板上的PLAY开关。
指示灯亮。
3)按下[SERVOONREADY],是其灯闪烁,接通伺服电源。
4)按下[START]开关,机器人开始执行调用的任务,程序执行过程中[START]灯一直亮着,程序执行完[START]灯熄灭。
三、 学生在教师的指导下操作:
编一个小程序,依次将各轴转动一次。
示教完成后,自动回放一次。
四、附一
常用指令
点动指令:
MOVJVJ=<执行速度>
输出指令:
DOUTOT#(输出号);开/关外部输出信号
跳转指令:
JUMP*LABEL;跳转到标号处
暂停指令:
TIMERT=<时间单位数>
附二
FHR1YASNACXRCUP6
程序FHR1
J:
FHR S:
000R1 TOOL:
*
000NOP
001SETB0001
002*FF
003MOVJVJ=20.00
004MOVJVJ=20.00
005MOVJVJ=10.00
006INCB000
007JUMP*FFIFB000〈=7
008END
 升级会员
升级会员 