PID的调节实例.docx
《PID的调节实例.docx》由会员分享,可在线阅读,更多相关《PID的调节实例.docx(12页珍藏版)》请在冰豆网上搜索。
PID的调节实例
PID的调节实例
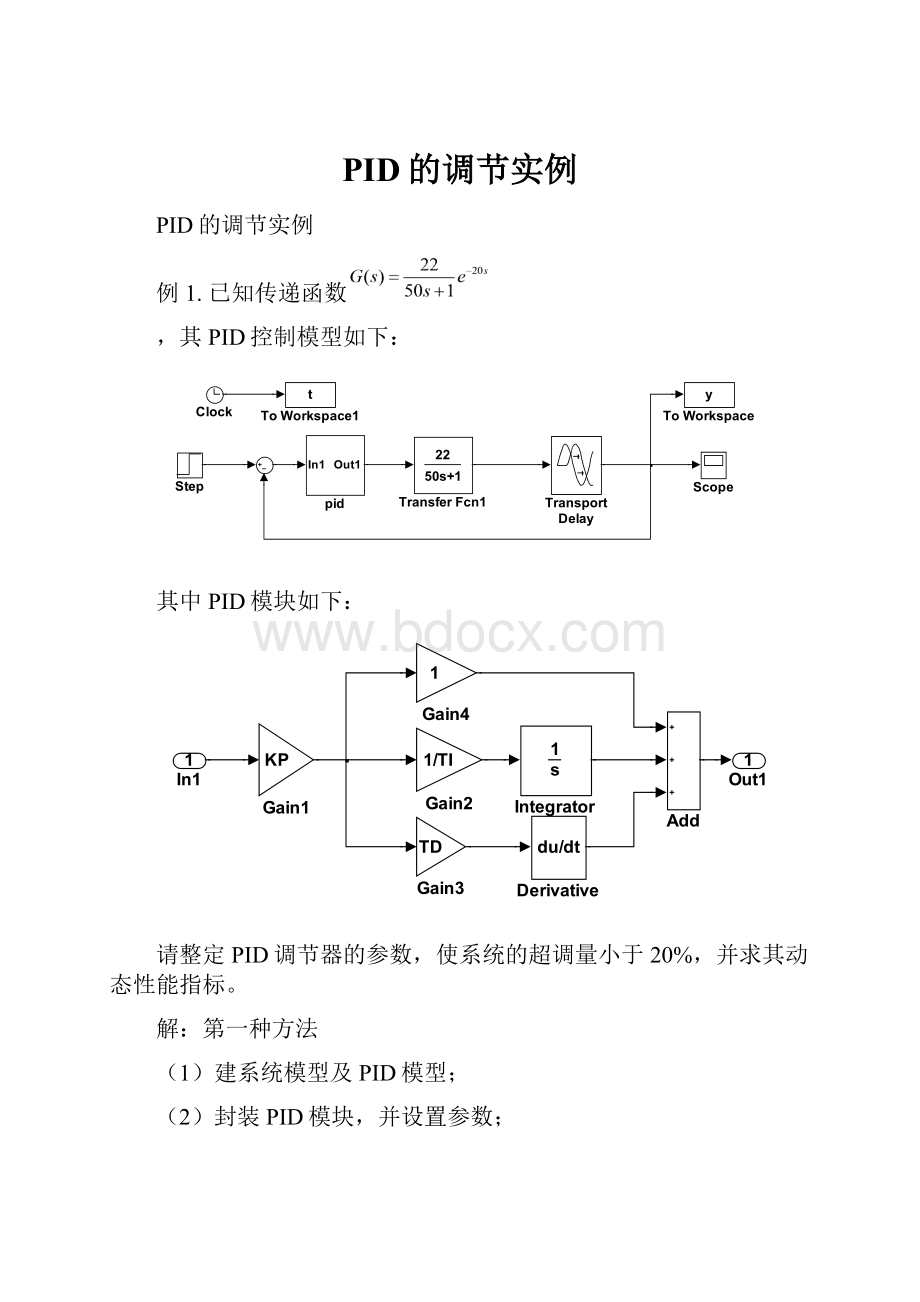
例1.已知传递函数
,其PID控制模型如下:
其中PID模块如下:
请整定PID调节器的参数,使系统的超调量小于20%,并求其动态性能指标。
解:
第一种方法
(1)建系统模型及PID模型;
(2)封装PID模块,并设置参数;
(3)利用Ziegler-Nichols整定公式整定PID调节器的初始参数;
表1.调节器Ziegler-Nichols整定公式
KP
TI
TD
P
PI
0.9
3.3
PID
1.2
2.2
0.5
根据题目已知,T=50,K=22,
=20,可求得PID参数如下:
KP
TI
TD
P
0.1136
PI
0.1023
66
PID
0.1364
44
10
利用此时的PID参数,得到的响应如下:
(4)对PID参数进行微调,使性能指标满足系统要求。
KP
TI
TD
P
0.1136
PI
0.1023
66
PID
0.1
65
7
利用此时的PID参数,得到的响应如下:
性能指标求取程序如下:
%性能指标求取程序xinnengzhibiao.m
plot(t,y)
[a,b]=size(y);
wentai=y(a)
caotiao=100*(max(y)-wentai)/wentai
INDEXtm=find(max(y)==y);
Tm=t(INDEXtm)%峰值时间
TT=t(find((abs(y-wentai)/wentai)>0.05));
Ts=max(TT)%调节时间
m=length(y);%求上升时间
fori=1:
m
ify(i)>wentai
time=t(i);
break;
end
end
Tr=time
求取的性能指标如下:
wentai=1.0010
caotiao=6.4881
Tm=55.5694
Ts=61.5694
Tr=49.5694
第二种方法:
(1)利用稳定边界法整定PID参数。
表2.稳定边界法PID整定公式
KP
TI
TD
P
0.5Km
PI
0.455Km
0.85*Tu
PID
Km/1.7
0.5Tu
Tu/8
取TI=inf,TD=O,求得此时的Km=0.213,Tu=72,带入上表,得:
KP
TI
TD
P
0.105
PI
0.0955
61.2
PID
0.1253
36
9
此时响应曲线为:
(2)对PID参数进行微调,使性能指标满足系统要求。
KP
TI
TD
P
0.105
PI
0.0955
61.2
PID
0.105
70
7
性能指标:
wentai=1.0006
caotiao=7.7695
Tm=55.4754
Ts=115.4754(误差为2%)
Tr=49.4754
例2.已知模型如下:
其中PID模块如下:
请用整定PID调节器的参数,使系统的超调量小于20%,并求其动态性能指标。
解:
(1)利用稳定边界法整定PID参数。
取TI=inf,TD=O,求得此时的Km=18.36,Tu=0.0333,带入上表,得:
KP
TI
TD
P
9.18
PI
8.3538
0.2805
PID
10.8
0.0167
0.0250
响应曲线如下:
(2)对PID参数进行微调,使性能指标满足系统要求。
KP
TI
TD
P
9.18
PI
8.3538
0.2805
PID
14
0.07
0.02
响应曲线如下:
性能指标如下:
wentai=84.8905
caotiao=14.6261
Tm=0.0802
Ts=0.2006
Tr=0.0415
1、比例部分:
Kp*e(t)
在PID控制器中,比例环节的作用是对偏差瞬间作出反应。
偏差一旦产生,控制器立即产生控制作用,使控制量向减少偏差的方向变化。
控制作用的强弱取决于比例系数Kp,比例系数Kp越大,控制作用越强,则过渡过程越快,控制过程的静态偏差就越小;但是Kp越大,也越容易产生震荡,破坏系统的稳定性。
故而,Kp选择必须恰当,才能达到过渡时间少,静差小而又稳定的效果。
2、积分部分:
Kp/Ti
从积分部分的数学表达式可以知道,只要存在偏差,则它的控制作用就不断的在加;只有在偏差为0时,它的积分才能是一个常数,控制作用才是一个不会增加的常数。
可见,积分作用可以消除系统的偏差。
积分环节的调节作用虽然会消除静态误差,但也会降低系统的响应速度,增加系统的超调量。
积分常数Ti越大,积分的积累作用越弱,这时系统在过渡时不会产生震荡;但是增大积分常数Ti会减慢静态误差的消除过程,消除偏差所需的时间也越长,但可以减小超调量,提高系统的稳定性。
当Ti较小时,则积分的作用较强,这时系统过渡时间中有可能产生振荡,不过消除偏差所需的时间较短。
所以必须根据实际控制的具体要求来确定Ti。
3、微分部分:
KP*Td
微分环节的作用是阻止偏差的变化。
它是根据偏差的变化趋势(变化速度)进行控制。
偏差变化越快,微分控制器的输出就越大,并能在偏差值变大之前进行修正。
微分作用的引入,将有助于减小超调量,克服振荡,使系统趋于稳定,特别对高阶系统非常有利,它加快了系统的跟踪速度。
但微分的作用对输入信号的噪声很敏感,对那些噪声较大的系统一般不用微分,或在微分起作用之前对输入信号进行滤波。
微分部分的作用由微分时间常数Td决定。
Td越大时,则它抑制偏差e(t)变化的作用越强;Td越小时,则它反抗偏差e(t)变化的作用越弱。
微分部分显然对系统的稳定有很大的作用。
 升级会员
升级会员 