LN功能手册5控制功能.docx
《LN功能手册5控制功能.docx》由会员分享,可在线阅读,更多相关《LN功能手册5控制功能.docx(49页珍藏版)》请在冰豆网上搜索。
LN功能手册5控制功能
15控制功能算法块(CONTROL)
从菜单项【功能模块】中选择【控制功能模块】,或者从工具条中选择
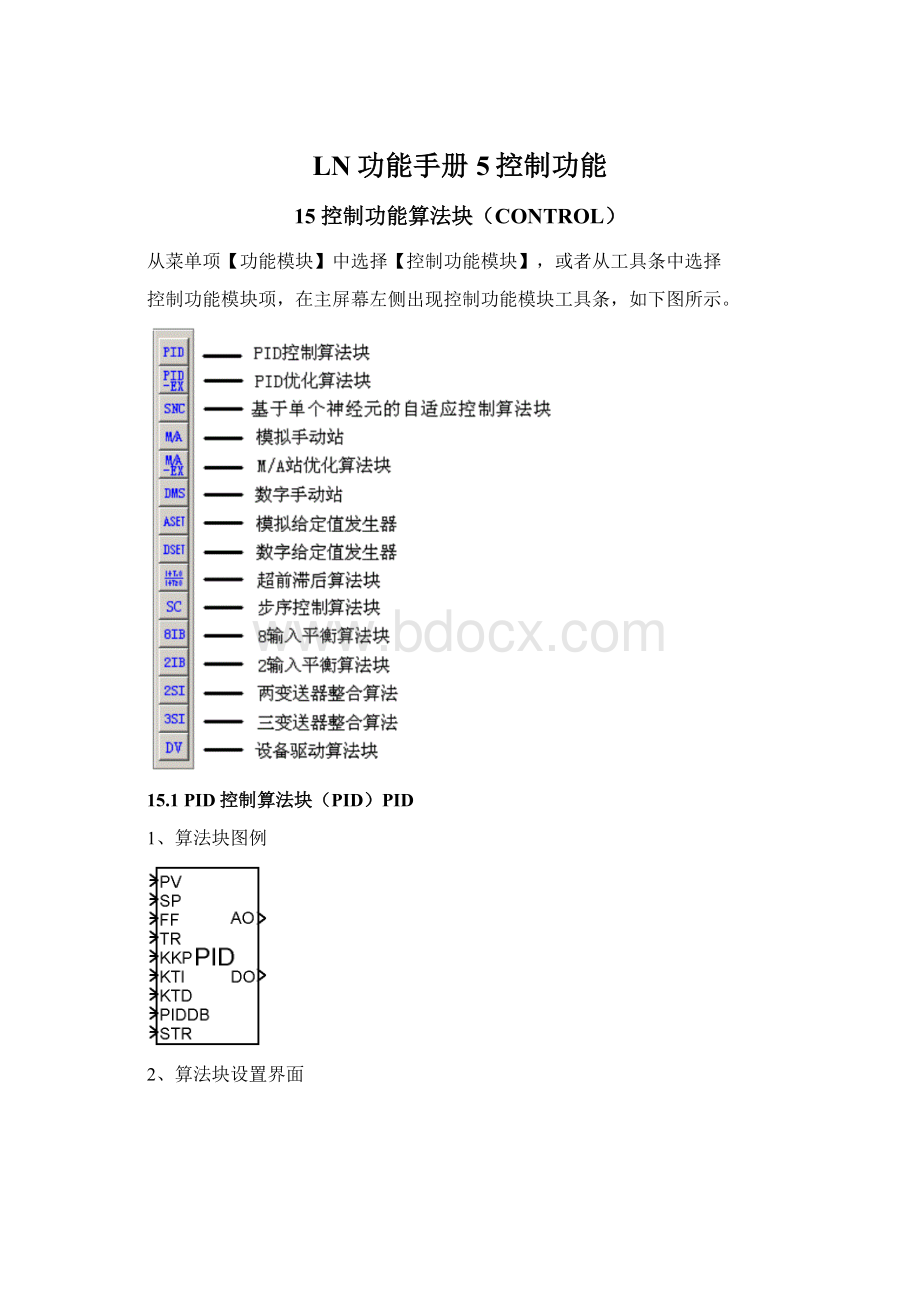
控制功能模块项,在主屏幕左侧出现控制功能模块工具条,如下图所示。
15.1PID控制算法块(PID)PID
1、算法块图例
2、算法块设置界面
3、算法块参数
符号
说明
类型
参
数
项
系统生成
Index
算法块ID号
Int
PAGENO.
页号
Int
用户录入
NO.
页内序号
Int
PID运算参数
δ
比例带
Double
TI
积分时间(=0时表示无积分)
Double
TD
微分时间(=0时表示无微分)
Double
KD
微分增益
Double
PVGain
PV增益
Double
PVBias
PV偏置
Double
SPGain
SP增益
Double
SPBiao
SP偏置
Double
OutMode
输出方式(增量式,位置式)
Enum
Direct
动作方向(正作用,反作用)
Enum
HighRange
输出量程上限
Double
LowRange
输出量程下限
Double
HighLmt
输出上限
Double
LowLmt
输出下限
Double
ErrALM
偏差报警限
Double
OutRate
输出变化率
Double
输入输出项
PV
过程变量
Double
SP
设定值
Double
FF
前馈值
Double
TR
跟踪值
Double
KKP
KKP比例增益
Double
KTI
KTI积分增益
Double
KTD
KTD微分增益
Double
PIDDB
PID死区
Double
STR
跟踪方式(0—自动;1—跟踪)
Bool
AO
模拟量输出
Double
DO
数字量输出
Bool
4、功能说明
本算法块能完成常规PID控制算法。
有多种工作状态,手动、自动、跟踪,这些状态间的切换是无扰的。
具有前馈、反馈输入端,可以进行变比例带调节,抗积分饱和,积分项平衡,绝对值和偏差报警。
PV增益和PV偏置:
对过程变量PV进行标度变换,使PV处于0~100%范围内。
SP增益和SP偏置:
对设定值SP进行标度变换,使SP处于0~100%范围内。
5、算法说明
在自动时,Y(s)=
在跟踪时,Y(s)=TR(s)
然后,将Y限制在HighRange和LowRange之间。
本功能块具有输出速率限制的功能,输出Y的变化率被限制在输出变化率OutRate以内。
当发生偏差报警时,DO输出为1;当偏差报警解除后,DO输出为0。
15.2PID优化算法块(PID-EX)AI
本算法块待开发。
1、算法块图例
2、算法块设置界面
3、算法块参数
符号
说明
类型
参
数
项
系统生成
Index
算法块ID号
Int
PAGENO.
页号
Int
用户录入
NO.
页内序号
Int
PID运算参数
δ
比例带
Double
TI
积分时间(=0时表示无积分)
Double
TD
微分时间(=0时表示无微分)
Double
KD
微分增益
Double
PVGain
PV增益
Double
PVBias
PV偏置
Double
SPGain
SP增益
Double
SPBiao
SP偏置
Double
OutMode
输出方式(增量式,位置式)
Enum
Direct
动作方向(正作用,反作用)
Enum
HighRange
输出量程上限
Double
LowRange
输出量程下限
Double
HighLmt
输出上限
Double
LowLmt
输出下限
Double
ErrALM
偏差报警限
Double
OutRate
输出变化率
Double
输入输出项
PV
过程变量
Double
SP
设定值
Double
FF
前馈值
Double
TR
跟踪值
Double
KKP
KKP比例增益
Double
KTI
KTI积分增益
Double
KTD
KTD微分增益
Double
KKD
KKD微分作用
Double
PIDDB
PID死区
Double
STR
跟踪方式(0—自动;1—跟踪)
Bool
IL
闭锁增
Bool
DL
闭锁减
Bool
AO
模拟量输出
Double
DO
数字量输出
Bool
4、功能说明
本算法块能完成常规PID控制算法。
有多种工作状态,手动、自动、跟踪,这些状态间的切换是无扰的。
具有前馈、反馈输入端,可以进行变比例带调节,抗积分饱和,积分项平衡,绝对值和偏差报警。
PV增益和PV偏置:
对过程变量PV进行标度变换,使PV处于0~100%范围内。
SP增益和SP偏置:
对设定值SP进行标度变换,使SP处于0~100%范围内。
5、算法说明
在自动时,Y(s)=
在跟踪时,Y(s)=TR(s)
然后,将Y限制在HighRange和LowRange之间。
本功能块具有输出速率限制的功能,输出Y的变化率被限制在输出变化率OutRate以内。
当发生偏差报警时,DO输出为1;当偏差报警解除后,DO输出为0。
本功能块具有输出闭锁增减限制的功能,当输入端有触发信号时就闭锁相应的动作方向。
15.3基于单个神经元的自适应控制算法块
本算法块待开发。
1、算法块图例
2、算法块设置界面
15.4模拟手动站算法块(M/A)AnalogueManStation
1、算法块图例
2、算法块设置界面
M/A站输入输出变量说明及输入初值设置
模拟手动站调试操作界面
3、算法块参数
符号
说明
类型
参
数
项
系统
生成
Index
算法块ID号
Int
PAGENO.
页号
Int
用
户
录
入
NO.
页内序号
Int
K
输出增益
Double
Bias
输出偏置
Double
YH
输出上限
Double
YL
输出下限
Double
SPH
设定值上限
Double
SPL
设定值下限
Double
TurnOver
输出反向(0—0%~100%;1—100%~0%)
Bool
FP
初始化方式(0—手动;1—自动)
Bool
MANF
手动禁止(0—允许手动;1—只能自动)
Bool
MODE
工作方式(0—Normal;1—Electric)
Bool
EMODE
Electric输出方式(0—长信号;1—脉冲)
Bool
TRATE
跟踪切换时变化率
Double
Deadband
死区
Double
OnTime
高电平宽度
Double
OffTime
低电平宽度
Double
输入输出变量说明:
输
入
输
出
变
量
说
明
输入参数
X
M/A站输入
Double
FF
前馈输入
Double
TR
跟踪输入
Double
YP
位置反馈
Double
TS
跟踪切换
Bool
BI
闭锁增
Bool
BD
闭锁减
Bool
MRE
强制手动信号
Bool
输出参数
Y
M/A站输出
Double
SP
设定值输出
Double
S
手操器状态(0—自动;1—手动)
Bool
INC
输出增信号
Bool
DEC
输出减信号
Bool
4、功能说明
当系统发出驱动执行机构的控制信号时,模拟手动站为操作员提供了一个对该控制信号进行人工干预的界面。
模拟手动站有两种工作方式:
自动、手动。
自动方式:
,FF为前馈信号;
当跟踪切换信号TS=1时,Y=TR(TR为跟踪输入);
当闭锁增BI=1,闭锁减BD=1时,Y保持不变;
设定值SP即是由运行人员在手操面板上操作的设定值,随面板上SP增减按钮而增加和减少,且SPL≤SP≤SPH;
在自动方式下,手动输出增减按钮不起作用。
手动方式:
输出Y由操作员通过手操面板上的手动增减按钮确定。
当闭锁增BI=1,闭锁减BD=1时,Y保持不变;
当跟踪切换信号TS=1时,Y=TR(TR为跟踪输入),此时屏蔽闭锁增、闭锁减和手动增减信号。
SP在此方式下也不起作用,但可增减。
方式切换:
●强制手动:
MRE=1时,M/A站切为手动方式。
●手操面板上的手动、自动按钮使M/A站切至手动、自动方式。
当处于自动状态的时候,S手操器状态输出为0,当处于手动状态的时候,S输出为1。
操作记录:
以下操作在操作员事件记录中进行记录:
SP改变开始、SP改变结束、输出改变开始、输出改变结束、方式切换。
M/A站的软伺放工作方式:
M/A站的软伺放(ELECTRIC)工作方式,是指当输出Y与位置反馈YP之间有差、且偏差大于死区时,
若Y>YP+DEADBAND,则输出INC为1;
若Y<YP-DEADBAND,则输出DEC为1。
5、算法说明
自动:
Y=
手动:
Y=MANOUT
Y被限制在YH和YL之间,同时,在跟踪切换期间提供了速率变化限制。
15.5M/A站优化算法块(M/A-EX)
本算法块待开发。
1、算法块图例
2、算法块设置界面
M/A站输入输出变量说明及输入初值设置
模拟手动站调试操作界面
3、算法块参数
符号
说明
类型
参
数
项
系统
生成
Index
算法块ID号
Int
PAGENO.
页号
Int
用
户
录
入
NO.
页内序号
Int
K
输出增益
Double
Bias
输出偏置
Double
YH
输出上限
Double
YL
输出下限
Double
SPH
设定值上限
Double
SPL
设定值下限
Double
TurnOver
输出反向(0—0%~100%;1—100%~0%)
Bool
FP
初始化方式(0—手动;1—自动)
Bool
MANF
手动禁止(0—允许手动;1—只能自动)
Bool
MODE
工作方式(0—Normal;1—Electric)
Bool
EMODE
Electric输出方式(0—长信号;1—脉冲)
Bool
TRATE
跟踪切换时变化率
Double
Deadband
死区
Double
OnTime
高电平宽度
Double
OffTime
低电平宽度
Double
输入输出变量说明:
输
入
输
出
变
量
说
明
输入参数
X
M/A站输入
Double
FF
前馈输入
Double
TR
跟踪输入
Double
YP
位置反馈
Double
SPT
给定跟踪
Double
TS
跟踪切换
Bool
BI
闭锁增
Bool
BD
闭锁减
Bool
MRE
强制手动信号
Bool
AR
自动请求
Bool
输出参数
Y
M/A站输出
Double
SP
设定值输出
Double
S
手操器状态(0—自动;1—手动)
Bool
INC
输出增信号
Bool
DEC
 升级会员
升级会员 