激光原理课程设计.docx
《激光原理课程设计.docx》由会员分享,可在线阅读,更多相关《激光原理课程设计.docx(18页珍藏版)》请在冰豆网上搜索。
激光原理课程设计
激光原理与技术课程设计
---谐振腔自再现模式特性分析
XXXuestc
1.课程设计任务与要求
课程设计任务与要求
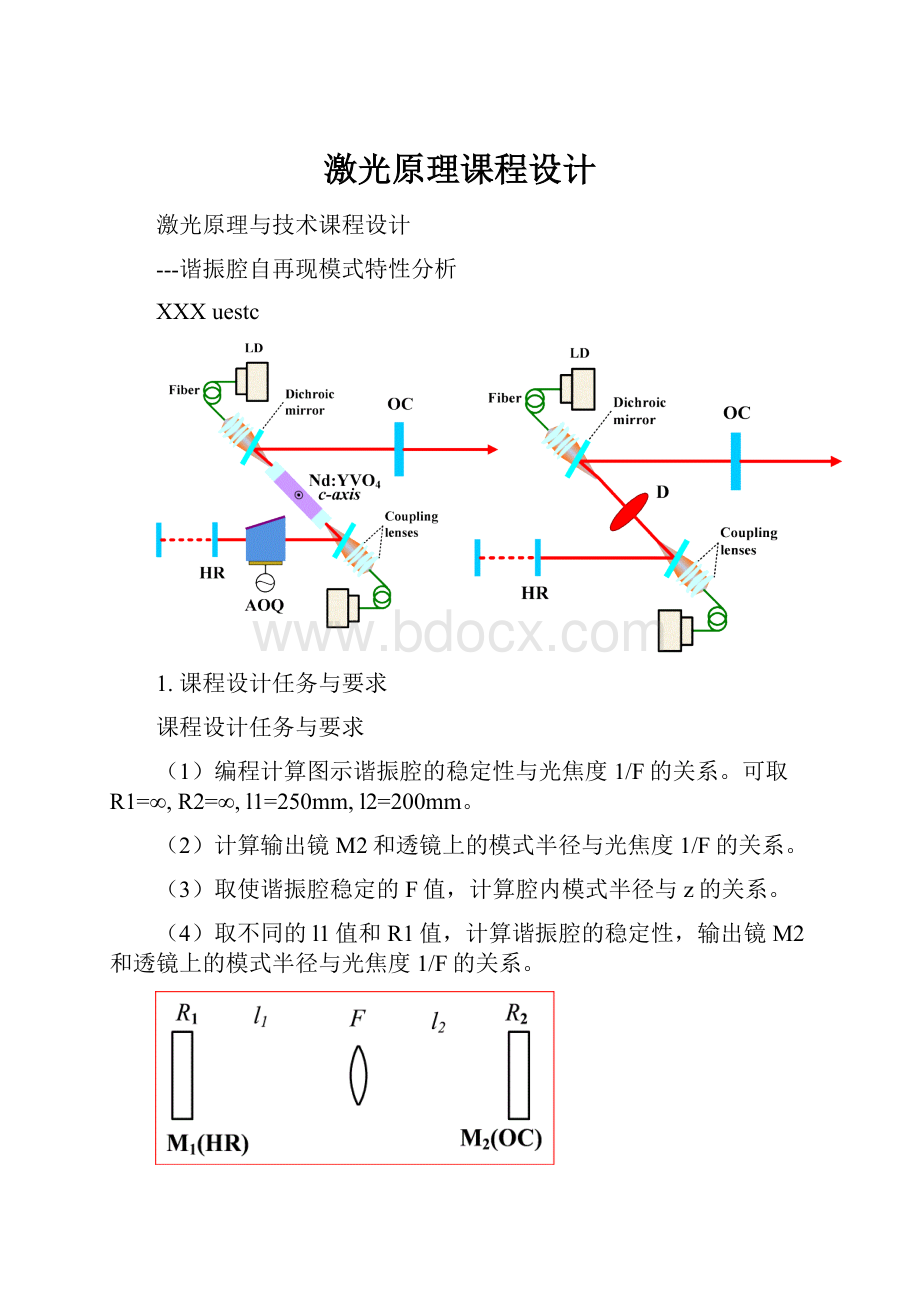
(1)编程计算图示谐振腔的稳定性与光焦度1/F的关系。
可取R1=∞,R2=∞,l1=250mm,l2=200mm。
(2)计算输出镜M2和透镜上的模式半径与光焦度1/F的关系。
(3)取使谐振腔稳定的F值,计算腔内模式半径与z的关系。
(4)取不同的l1值和R1值,计算谐振腔的稳定性,输出镜M2和透镜上的模式半径与光焦度1/F的关系。
(5)进行光线追迹,计算从M1出发,光线参数为(r0,θ0)的光线在腔内往返传播的轨迹。
2.实验原理分析
1)光焦度与谐振腔稳定性的关系
光学谐振腔的稳定性可以用光线往返一周后的【ABCD】矩阵来描述,根据谐振腔稳定性条件可以判断,当
<1时为稳定腔,当
>1时为非稳腔,当
=1时为临界腔。
再用matlab方法作图就可以画出光焦度D与谐振腔稳定性的关系
2)光焦度与透镜和输出镜作图原理
设腔内五个部分的【ABCD】矩阵分别为Tr1Tl1TFTl2Tr2,透镜和输出镜上的传播矩阵分别为
T1=Tl1*Tr1*Tl1*TF*Tl2*Tr2*Tl2*TF和T2=Tl2*TF*Tl1*Tr1*Tl1*TF*Tl2*Tr2;利用matlab编程得到
传播矩阵T1T2,根据公式,用matlab方法作图就可以画出光焦度D与透
镜和输出镜上光斑半径的关系。
3)z与光斑半径作图原理
算输出镜M2和透镜上的模式半径与光焦度D的关系,根据公式只要求得光腰半径w0的大小,就可以求出任意处z的光斑半径大小,而光腰半径w0的大小可以用上述公式逆用求得,根据某一参考面【ABCD】矩阵,可以求出该处光斑半径,和等相位面的大小,以及相对光腰的位置z,根据公式作图就可以得到z和光斑半径的关系。
4)光线追迹原理
设从R1上射出的光线位置参数为【r;θ】,则传播到透镜上的位置参数为【rF;θF】则二者存在关系式:
【rF;θF】=TF*Tl1*【r;θ】,在左腔镜中,X=0:
l1;Y=rF+XθF根据X,Y的关系就可以做出光线在左腔镜中的传播轨迹,经过透镜和被R2反射的光线也可以利用相同方法求出,重复上述过程,可以得到从某一范围发出的光线在谐振腔内的轨迹图。
3,仿真图像
3.1谐振腔的稳定性与透镜光焦度关系:
R1=inf;R2=inf;l1=200mm;l2=200mm;R1=1000mm;R2=inf;l1=200mm;l2=200mm;
4源程序
R1=inf;R2=inf;l1=100mm;l2=200mm;R1=700mm;R2=inf;l1=200mm;l2=200mm;
3.2透镜光焦度与透镜,输出镜上光斑半径的关系(波长取lamda=1064e-6mm)
R1=inf;R2=inf;l1=200mm;l2=200mm;R1=1000;R2=inf;l1=100mm;l2=200mm;
R1=inf;R2=inf;l1=100mm;l2=200mm;R1=inf;R2=inf;l1=100mm;l2=200mm;
3.3不同位置z与光斑半径的关系(波长取lamda=1064e-6mm)
R1=inf;R2=inf;l1=200;l2=200;F=190R1=inf;R2=inf;l1=100;l2=200;F=90
R1=inf;R2=inf;l1=200;l2=100;F=85R1=1000;R2=inf;l1=300;l2=100;F=130
3.4光线追迹
R1=inf;R2=inf;l1=200;l2=200;F=200R1=inf;R2=inf;l1=200;l2=200;F=90
R1=inf;R2=inf;l1=300;l2=200;F=300R1=100;R2=inf;l1=200;l2=200;F=160
R1=inf;R2=inf;l1=200;l2=200;F=120
5matlab代码
5.1谐振腔的稳定性与透镜光焦度关系
clear
clc
R1=inf;R2=inf;l1=200;l2=200;
i=0;
forD=0:
0.0002:
0.012
i=i+1;
Tr1=[10;-2/R11];
Tr2=[10;-2/R21];
Tl1=[1l1;01];%l1距离
Tl2=[1l2;01];%L2距离
TF=[10;-D1];%透镜
T=Tr1*Tl1*TF*Tl2*Tr2*Tl2*TF*Tl1;
y(i)=(T(1,1)+T(2,2)).^2/4;
x(i)=D;
end
plot(x,y)
xlabel('透镜光焦度D(mm^-^1)')
ylabel('(A+D)^2/4')
axis([00.01201.5])
gridon
5.2透镜光焦度与透镜,输出镜上光斑半径的关系
clear
clc
R1=inf;R2=inf;l1=300;l2=200;
lamda=1064e-6;
i=0;
forD=0:
0.00002:
0.02
i=i+1;
Tr1=[10;-2/R11];
Tr2=[10;-2/R21];
Tl1=[1l1;01];%l1距离
Tl2=[1l2;01];%L2距离
TF=[10;-D1];%透镜
T1=Tl1*Tr1*Tl1*TF*Tl2*Tr2*Tl2*TF;
T2=Tl2*TF*Tl1*Tr1*Tl1*TF*Tl2*Tr2;
A1=T1(1,1);
B1=T1(1,2);
C1=T1(2,1);
D1=T1(2,2);
A2=T2(1,1);
B2=T2(1,2);
C2=T2(2,1);
D2=T2(2,2);
g1=((A1+D1)/2)^2;
g2=((A2+D2)/2)^2;
w1=sqrt(lamda*abs(B1)/pi/sqrt(1-((A1+D1)/2)^2));
w2=sqrt(lamda*abs(B2)/pi/sqrt(1-((A2+D2)/2)^2));
ifg1>1
y1(i)=nan;
else
y1(i)=w1;
end
ifg2>1
y2(i)=nan;
else
y2(i)=w2;
end
x(i)=D;
end
plot(x,y1,'r.',x,y2)
legend('透镜','输出镜')
xlabel('透镜光焦度D(mm^-^1)')
ylabel('光束半径(mm)')
axis([00.01201])
gridon
5.3不同位置z与光斑半径作图
clear
clc
R1=inf;R2=inf;l1=300;l2=200;F=130;
lamda=1064e-6;
temp=l1+l2;
temp2=l1-0.1;
i=0;
Tr1=[10;-2/R11];
Tr2=[10;-2/R21];
Tl1=[1l1;01];%l1距离
Tl2=[1l2;01];%L2距离
TF=[10;-1/F1];%透镜
T1=Tl1*Tr1*Tl1*TF*Tl2*Tr2*Tl2*TF;
T2=Tl2*TF*Tl1*Tr1*Tl1*TF*Tl2*Tr2;
A1=T1(1,1);
B1=T1(1,2);
C1=T1(2,1);
D1=T1(2,2);
A2=T2(1,1);
B2=T2(1,2);
C2=T2(2,1);
D2=T2(2,2);
Rz=2*B1/(D1-A1)%参考面等相位面
w0=sqrt(lamda*abs(B1)/pi/sqrt(1-((A1+D1)/2)^2))%参考面光斑半径
w01=w0/(sqrt(1+(pi*w0*w0/lamda/Rz)^2))%腰斑半径
Z01=Rz/(1+(lamda*Rz/pi/w0/w0)^2)
%腰斑位置
w02=F*w01/sqrt((F-Z01)^2+(pi*w01*w01/lamda)^2)
%透镜右方的光腰半径
Z02=F+(Z01-F)*F^2/((Z01-F)^2+(pi*w01*w01/lamda)^2)
%透镜右方的光腰参数
forz=0:
0.1:
temp
i=i+1;
ifzg1=((A1+D1)/2)^2;
wz=w01*sqrt(1+(lamda*z/pi/w01/w01)^2);
ifg1>1
y1(i)=nan;
else
y1(i)=wz;
end
else
wz=w02*sqrt(1+(lamda*(temp-z)/pi/w02/w02)^2);
ifg1>1
y1(i)=nan;
else
y1(i)=wz;
end
end
x(i)=z;
y1(i)=wz;
end
plot(x,y1)
legend('输出镜')
xlabel('Z(mm)')
ylabel('光束半径(mm)')
gridon
5.4光线追迹
clc
clear
F=90,l1=200;
l2=200;R1=1000;R2=inf;%inputparameters66.7mm-114mm
%stableanalysis
Tl1=[1,l1;0,1];Tf=[10;-1/F,1];Tl2=[1l2;01];Tr1=[10;-2/R11];
Tr2=[10;-2/R21];
T=Tr1*Tl1*Tf*Tl2*Tr2*Tl2*Tf*Tl1%matrixofroundtrip
S=(T(1,1)+T(2,2))/2%(A+D)/2
%oneroundtrip;
r0=0
fortheta0=0.005*pi/180:
0.005*pi/180
line0=[r0;theta0];
m=200;
forn=1:
1:
m
x0=0:
1:
l1;
y0=line0(1,1)+x0*line0(2,1);
plot(x0,y0,'b');
holdon
line1=Tl1*line0;
line2=Tf*line1;
x2=l1:
1:
l1+l2;
y2=line2(1,1)+(x2-l1)*line2(2,1);
plot(x2,y2,'c');
line3=Tl2*line2;
line4=Tr2*line3;
x4=(l1+l2):
-1:
l1;
y4=line4(1,1)-(x4-l1-l2)*line4(2,1);
plot(x4,y4,'r')
line5=Tl2*line4;
line6=Tf*line5;
x6=l1:
-1:
0;
y6=line6(1,1)-(x6-l1)*line6(2,1);
plot(x6,y6,'y');
line7=Tl1*line6;
line0=line7;
end
end
xlabel('Z(mm)')
ylabel('光束位置')
参考文献:
[1]周炳琨,高以智,陈倜嵘,陈家骅,激光原理,国防工业出版社,2004。
[2]欧攀高等光学仿真(matlab版)北京航空航天大学出版社,2011。
[3]吕百达,激光光学-光束描述、传输变换与光腔技术物理,高等教育出版社,2003。
 升级会员
升级会员 