太阳能聚光器设计说明书.docx
《太阳能聚光器设计说明书.docx》由会员分享,可在线阅读,更多相关《太阳能聚光器设计说明书.docx(21页珍藏版)》请在冰豆网上搜索。
太阳能聚光器设计说明书
第一章设计原理
人类社会已经进入了高度发达的阶段,经济高速发展,电脑已经渗透了现在社会的各个行业,但随之而来的负面影响也异常严重。
例如:
环境污染,它已成为世界问题,如何解决这个问题已是当务之急。
此时,提高太阳能的利用率已显的尤为重要。
我国处于太阳能相对较充足的地理位置,太阳能是无穷无尽的。
大家都知道向日葵是天生的太阳能跟踪器,它从太阳东边升起到西方落下,每时每刻都跟踪太阳。
可以说没有的什么设备比向日葵更能准确地跟踪太阳了。
本装置就是根据向日葵的原理设计的。
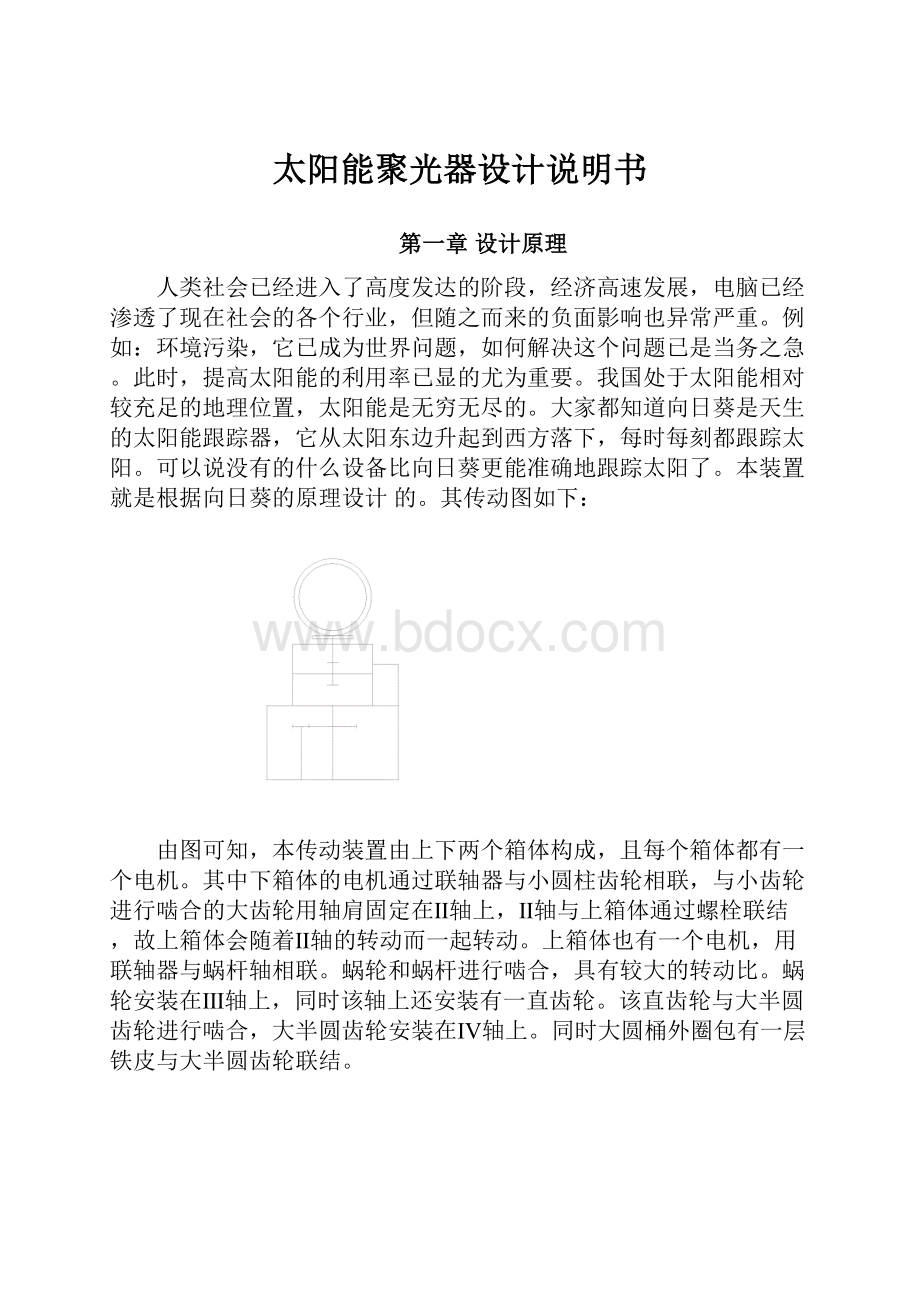
其传动图如下:
由图可知,本传动装置由上下两个箱体构成,且每个箱体都有一个电机。
其中下箱体的电机通过联轴器与小圆柱齿轮相联,与小齿轮进行啮合的大齿轮用轴肩固定在Ⅱ轴上,Ⅱ轴与上箱体通过螺栓联结,故上箱体会随着Ⅱ轴的转动而一起转动。
上箱体也有一个电机,用联轴器与蜗杆轴相联。
蜗轮和蜗杆进行啮合,具有较大的转动比。
蜗轮安装在Ⅲ轴上,同时该轴上还安装有一直齿轮。
该直齿轮与大半圆齿轮进行啮合,大半圆齿轮安装在Ⅳ轴上。
同时大圆桶外圈包有一层铁皮与大半圆齿轮联结。
第二章电动机的选择计算
2.1电动机的简介
2.1.1宽调速直流伺服电机
宽调速直流伺服电机分为电励磁和永久磁铁两种。
电励磁的特点是励磁量便于调整,易于安排补偿绕组和换向极,电机的换向性能得到了改善,成本低,可以在较宽的速度范围内得到恒转矩特性。
永久磁铁一般没有换向极和补偿绕组,其换向性能受到一定限制,但它不需要励磁功率,因而效率高,电机在低速时输出较大转矩。
此外这种结构温升低,电机直径可以做得小些,加上目前永磁材料性能不断提高,成本逐渐下降,因此这种结构用得较多。
宽调速直流伺服电机的特点:
(1)电机输出力矩大。
在相同的转子外径和电枢电流情况下,其设计的力矩系数较大,所以可产生较大力矩,使电机的转矩和惯量比值增大,因而可满足足够快的加减速要求。
在低速时能输出较大力矩,能直接驱动丝杆、简化结构、降低成本且提高了精度。
(2)电机过载能力强。
电机转子有槽,热容量大,因而热时间常数大,耐热性能好,可以过载运行几十分钟。
(3)动态响应性能好。
电机定子采用高性能永磁材料,具有很高的矫顽力和足够的尺寸厚度,提高了电机效率,又没有励磁损耗,去磁临界电流可取得大,能产生10~15倍的瞬时转矩,而不出现退磁现象,从而使动态响应性能大大提高。
(4)低速运转平稳。
由于电机转子直径大,电机槽和换向片数可以增多,使电机的输出力矩波动减小,有利于电机低速运转平稳。
(5)易于调整。
2.1.2步进电机
它是一种将电脉冲信号变成相应的直流位移或角位移的数字/模拟变换器。
一般电机是连续转动的,而步进电机则每当电机绕组接受一个脉冲时,转子就转过一个相应的角度,低频运行时,明显可见电机转轴是一步一步地转动的,因此称为步进电机。
步进电机的角位移量和输入脉冲的个数成正比。
在时间上与输入脉冲同步,因而只要
控制输入脉冲的数量、频率和电机绕组的相序,即可获得所需转角的转速和转动方向。
步进电机大致分为三类:
第一种类型为可变磁组式步进电机,转子无绕组,步进电机是由定子绕组通电励磁产生的反应力矩作用来实现的。
因而也称反应式步进电机。
这类电机结构简单,工作可靠,运行频率高,步距角。
第二类为永磁型步进电机,转子采用永磁铁,在圆周上进行多极磁化,它的转动靠与定子绕组所产生的电磁力相互吸引或相斥来实现,这类功率小,效率高,造价高。
转子为永磁铁,因而无励磁时也具有保持力,但由于转子极对数受磁钢加工限制,因而步距角较大,电机频率响应较低,常使用在记录仪、空调机等速度低的场合。
第三类为混合型步进电机,也称永磁反应式步进电机,其定子与VR型类似,磁极上有控制绕组,极靴表面上有小齿,转子由永磁铁和铁芯构成,同样切有小齿。
由于是永磁铁,转子齿带有固定极性。
这类电机既具有VR型步距角小,工作频率高的特点,又有PW型控制功率小、无励磁时具有转矩定位的优点。
但其结构复杂,成本相对也高。
2.2电动机的计算
2.2.1上箱体的电动机
该太阳能聚光板是根据向日葵的原理设计的,整个装置是间歇运动的,且转动缓慢。
圆桶与外面的铁皮总质量约为15kg,其转动时由于重
心偏移要产生转矩。
2.2.2下箱体的电动机
上箱体的质量约为40kg,上箱体与下箱体之间靠圆珠和导轨传递功率,取表面粗糙度系数为0.9,则转动时产生摩擦力F=40×10×0.9=360N
综上所述,经分析都选用步进电机,型号是110BF003
第三章传动装置的运动与参数的选择和计算
3.1齿轮传动设计计算
3.1.1齿轮材料及热处理方法的选择
齿轮的材料选用45号钢,为增加齿轮强度,采用正火调质处理,由于该整体装置属于间歇传动,且每转动一次,它所传动的角度比较小。
东西全天转角180º,南北全天转角90º,步进电机为三相六拍,每个脉冲为0.75º。
故整个传动系统的传动比较大。
东西传动i=5,南北方向传动i=40,i1=8,i2=5。
3.1.2直齿圆柱齿轮设计计算
1.选择材料
小齿轮选用40Cr钢,调质处理,齿面硬度241~286HBS
大齿轮选用ZG310~570,正火处理,齿面硬度156~217HBS
2.计算应力循环次数:
大齿轮:
N2=300×1×10=3×10³N
小齿轮:
N1=6×3×10³=15×10CN
查表得:
ZN1=1.05ZN2=1.14(接触强度计算的寿命系数)
ZX1=ZX2=1.0(接触强度计算的尺寸系数)
取SHmin=1.0(接触强度计算的最小安全系数)
取Zw=1.0(工作硬化系数)
取ZLVR=0.92(润滑油膜影响系数)
按齿面硬度241HBS和156HBS,得σHlim1=650MPa
σHlim2=435MPa
3.计算作用接触应力
﹝σH﹞1=σHlim1×ZN1×ZX1×Zw×ZLVR/Shmin
=650×1.05×1.0×1.0×0.92/1.0
=627.9MPa
﹝σH﹞2=σHlim2×ZN2×ZX2×Zw×ZLVR/Shmin
=435×1.4×1.0×1.0×0.92/1.0
=456.2MPa
计算中取﹝σH﹞=456.2MPa
4.按齿面接触强度确定中心距
大齿轮最大转矩T2=G×500=10×10×500=50×10³N·mm
小齿轮最大转矩T1=T2×1/5=10×10³N·mm
初取KtZεt²=1.1
取Φa=0.4
由《机械设计》表5-5,得ZE=188.9Mpa½
减速传动u=і=5
ZH=﹝2/(cosa·sina)﹞½=2.5
a≥(u+1)×﹝KT1/2uΦa×(ZHZEZε/﹝σH)²)﹞⅔=86mm
由于结构需要取a=150mm
估算模数m=(0.007~0.02)×a=(0.007~0.02)×150=1.05~3
取标准模数m=2
齿轮齿数Z1=2a/(mu+m)=2×150/(10+2)=25
Z2=uZ1=5×25=125
齿轮分度圆直径:
d1=mZ1=2×25=50mm
d2=mZ2=2×125=250mm
齿轮齿顶圆直径:
da1=d1+2ha*m=50+2×1.0×2=54mm
da2=d2+2ha*m=250+2×1.0×2=254mm
齿轮基圆直径:
db1=d1×cosa=47mm
db2=d2×cosa=235mm
3.验算齿面接触疲劳强度
取KA=1.0(使用系数)
按8级精度,Kv=1.6(动载系数)
齿宽b=Φa×a=0.4×150=60mm
Kα=1.08(齿向载荷分布系数)
Kβ=1.1(齿间载荷分配系数)
载荷系数K=KAKvKαKβ=1.0×1.06×1.08×1.1=1.26
计算端面重合度εα
齿顶压力角αa1=arccosdb1/da1=arccos47/54=29.52º
αa1=arccosdb2/da2=arccos235/254=22.34º
εα=﹝Z1(tanαa1-tanα)+Z2(tanαa2-tanα)﹞/2π
=﹝25×(tan29.52º-tan20º)+125×(tan22.34º-tan20º)﹞/2π
=1.83
Zε=C(4-εα)/3﹞½=﹝(4-1.83)/3﹞½=0.85
计算齿面接触应力
σH=ZHZEZε﹝2KT1(u+1)/(bd1²)﹞
=2.5×188.9×0.85×﹝2×12.6×10³(5+1)/(60×50²×5)﹞
=180.2Mpa﹤﹝σH﹞=456.2Mpa
4.齿轮主要参数的计算
Z1=25Z2=125m=2u=5
d1=mZ1=2×25=50mm
d2=mZ2=2×125=250mm
da1=d1+2ha*m=50+2×1.0×2=54mm
da2=d2+2ha*m=250+2×1.0×2=254mm
df1=da1-2(ha*+c*)m=50-2×(1.0+0.25)×2=45mm
df2=da2-2(ha*+c*)m=250-2×(1.0+0.25)×2=245mm
a=150mm
齿宽b2=b=60mm取b1=b2+(5~10)=66mm
3.2蜗轮蜗杆设计计算
3.2.1材料的选择
由蜗轮传动的失效形式知,对蜗轮、蜗杆的材料不仅要有足够的强度,更重要的是应具有良好的饱和性,减磨性及耐磨性,取蜗杆的材料为45号钢,蜗轮的材料为铸造青铜。
3.2.2蜗杆的受力分析
T1=9550×10³P/N=4203.3N·mm
取蜗杆的分度圆直径d1=28模数m=2.5
为保障有较大的传动比及工作效率
蜗杆的头数取为4,传动比为8,则蜗轮的齿数为32
则蜗轮蜗杆传动中心距为
a=(d1+d2)/2=(28+2.5×32)/2=54mm
蜗杆分度圆柱导程角γ
tanγ=Z1m/d1=4×2.5/28=0.357
则γ=19.6º
由受力可知:
Ft1=2T1/d1=300N
c=2T1/d2=105N
Fn=Fa1/(cosαncosγ)=118.62N
3.3蜗轮齿面接触疲劳强度计算
蜗轮齿根弯曲疲劳强度计算:
σF=﹝1.53KT2cosγ/(d1d2m)﹞Yfa2
=6.85Mpa﹤﹝σF﹞
安全
由于本装置属于间歇传动,蜗轮蜗杆的发热量很小,故可以不进行润滑。
故蜗轮蜗杆的主要参数为:
分度圆直径:
d1=28mmd2=mZ2=2.5×32=80mm
齿根圆直径:
df1=da1-2(ha*+c*)m=28-2×(1.0+0.25)×2.5=21.75mm
df2=da2-2(ha*+c*)m=80-2×(1.0+0.25)×2.5=73.75mm
齿顶圆直径:
da1=d1+22=28+2×1.0×2.5=33mm
蜗轮齿顶高:
ha2=ha*m=2.5×1.0=2.5mm
顶隙C=c*m=0.25×2.5=0.625mm
蜗轮齿宽角θ=2arcsinb2/d1=2arcsin22.11/28=104°
第四章轴、轴承及键的设计计算
4.1轴的设计计算
4.1.1对上箱体的轴的最小直径的计算
圆筒外圈包有一层铁皮,总共质量约为15kg,当圆筒转过90º后,将产生扭矩T=150×110/2=7500N·mm
初估圆筒轴心与左边箱体距离为340mm
由重力产生的弯矩M=150×340/2=25500N·mm
将弯扭合成计算轴径(转矩不变化计算a=0.3)
所以材料选用45号钢,正火处理,σb=600Mpa
﹝σB﹞H=200Mpa
由σcb=Mca/0.1d³≤﹝σB﹞
为与轴承配合使用,取最小直径dmin=20mm
4.1.2对下箱体的轴的最小直径的计算
由d≥A0×(P/n)½=150×(550×0.99²/1.2)½
为与轴承配合使用,取最小直径dmin=20mm
4.2轴承的校核
Ⅰ轴上的轴承选用深沟球轴承6205
4.2.1确定轴承的承载能力
由于Ⅰ轴承大部分时间处于静止状态,并在转数极低的情况下,其
失效形式是滚动体与内圈接触产生大的塑性变形,所以只作静强度计算即可。
查表得:
C0=6.95KN
轴承所受径向载荷,所以P0=R=50N
C0/P0=695/50=139>S0
所以此轴承安全。
4.3键的设计校核
根据Ⅰ轴上的转矩及轴上零件不需轴向滑移,所以选择A型普通平键,初选键8×40GB1096-79
校核:
Tmax=500×G/2=25000N·mm
σp=2T/(dhl)=4×25×10³/(30×7×40)=11.9Mpa
查表﹝σp﹞=(125~150)Mpa
可知σp〈﹝σp〉
所选键满足强度要求。
第六章程序框图和程序
6.1程序框图
本次设计主要是用两个步进电机分别控制两个方向的运动,M1电机控制东西方向运动,东西转角180°,M2电机控制南北方向运动,南北转角90°。
两个步进电机都是三相六拍的电机,步距角为0.75°。
在单片机的控制系统中,键盘/显示系统常用来监视和分析键盘输入的命令和数据以及显示被控制系统的工作状态。
键盘/显示系统是单片机不可缺少的部件,它常由硬件和软件程序两部分组成。
 升级会员
升级会员 