机械工程导论论文1.docx
《机械工程导论论文1.docx》由会员分享,可在线阅读,更多相关《机械工程导论论文1.docx(16页珍藏版)》请在冰豆网上搜索。
机械工程导论论文1
机械工程导论论文
学院:
机电学院
班级:
机械五班
作者:
***
学号:
***********
摘要
关键词
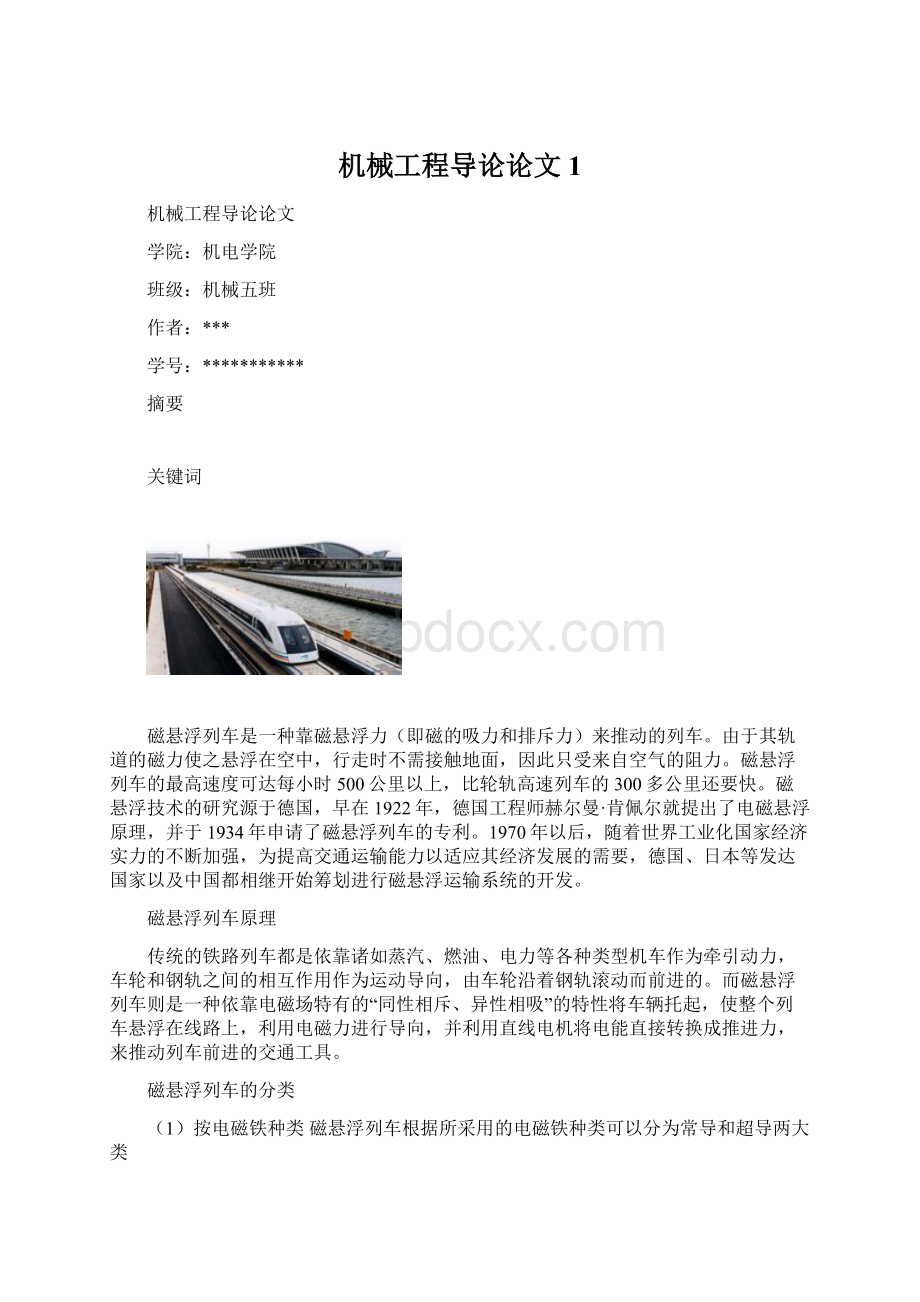
磁悬浮列车是一种靠磁悬浮力(即磁的吸力和排斥力)来推动的列车。
由于其轨道的磁力使之悬浮在空中,行走时不需接触地面,因此只受来自空气的阻力。
磁悬浮列车的最高速度可达每小时500公里以上,比轮轨高速列车的300多公里还要快。
磁悬浮技术的研究源于德国,早在1922年,德国工程师赫尔曼·肯佩尔就提出了电磁悬浮原理,并于1934年申请了磁悬浮列车的专利。
1970年以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本等发达国家以及中国都相继开始筹划进行磁悬浮运输系统的开发。
磁悬浮列车原理
传统的铁路列车都是依靠诸如蒸汽、燃油、电力等各种类型机车作为牵引动力,车轮和钢轨之间的相互作用作为运动导向,由车轮沿着钢轨滚动而前进的。
而磁悬浮列车则是一种依靠电磁场特有的“同性相斥、异性相吸”的特性将车辆托起,使整个列车悬浮在线路上,利用电磁力进行导向,并利用直线电机将电能直接转换成推进力,来推动列车前进的交通工具。
磁悬浮列车的分类
(1)按电磁铁种类磁悬浮列车根据所采用的电磁铁种类可以分为常导和超导两大类
(2)按悬浮方式磁悬浮列车分为电磁吸引式悬浮(EMS)和永磁力悬浮(PRS)及感应斥力悬浮(EDS)。
EMS该方式利用导磁材料与电磁铁之间的吸引力,绝大部分悬浮采用此方式。
PRS这是一种最简单的方案,利用永久磁铁同极间的斥力,其缺点是横向位移的不稳定因素。
EDS依靠励磁线圈和短路线圈的相对运动得到斥力,所以列车要有足够的速度才能悬浮起来,大约为100km/h,它不适用于低速。
磁悬浮列车的原理
常导磁吸式(EMS)利用装在车辆两侧转向架上的常导电磁铁(悬浮电磁铁)和铺设在线路导轨上的磁铁,在磁场作用下产生的吸引力使车辆浮起。
车辆和轨面之间的间隙与吸引力的大小成反比。
为了保证这种悬浮的可靠性和列车运行的平稳,使直线电机有较高的功率,必须精确地控制电磁铁中的电流,使磁场保持稳定的强度和悬浮力,使车体与导轨之间保持大约10mm的间隙。
通常采用测量间隙用的气隙传感器来进行系统的反馈控制。
这种悬浮方式不需要设置专用的着地支撑装置和辅助的着地车轮,对控制系统的要求也可以稍低一些。
常导式磁悬浮列车示意图
超导磁斥式
日本磁悬浮铁路ML系统使用低温超导技术。
它用液氮作为冷冻液,当线圈绕组达到-269摄氏度的温度时车载线圈绕组即进入超导状态。
为了提高磁悬浮车辆上超导材料的稳定性,日本使用铌钛合金作为线圈绕组材料。
低温超导原理如图
日本超导磁悬浮系统的悬浮力来自于车辆两侧。
在导轨两侧的侧壁上,排列着一组组的导向绕组。
当车辆高速通过时,车辆上的超导磁场会在导轨侧壁的悬浮绕组中产生感应电流和感应磁场。
控制每组悬浮绕组上侧的磁场极性与车辆超导磁场的极性相反从而产生引力,下侧极性与超导磁场极性相同同而产生斥力,使得车辆悬浮起来,见图
由于导轨产生的悬浮磁场为感应磁场,列车运行速度越高则悬浮力越大。
当列车运行速度低于120km/h之后,所产生的悬浮力较小,不足以支撑车辆悬浮。
故当运行速度低于120km/h时,日本的超导磁悬浮车辆需依靠安装在转向架底部的车轮支撑行驶,见图
当速度高于120km/h时,车辆就自动悬浮起来。
车辆以500km/h的速度运行时,其悬浮高度约为10cm。
下面我们详细介绍一下EMS
1 基本原理
德国Transraipd技术是一种成熟的磁悬浮技术,主要原理是基于EMS(ElectromagneticSuspension)悬浮和LSM(LinearSynchronousMotors)技术驱动。
德国从1969年开始研究发展常导磁悬浮车辆技术,以Transrapid型系列磁悬浮车辆为代表。
其主要原理是利用普通直流电磁铁的电磁吸力将列车悬浮起,产生驱动导向力使车辆向前运行,并通过导体通电励磁产生电磁悬浮,速度每小时可以达到400~500km/h,悬浮气隙(Airgap)一般是10mm左右。
上海磁悬浮示范线是世界上首条采用TR08磁悬浮技术的商业运行线路[2],其悬浮原理如图所示。
2 结构分析
磁悬浮车辆结构主要是由车体(也称为车厢)夹层结构和悬浮架组成。
车厢与走行机构的悬浮架之间通过二系悬挂以及牵引拉杆相互连接。
夹层要连接车厢和安装走行机构,以及安装信号和电力设备等。
悬浮架是车辆的走行机构,其作用是装载电磁铁,且将悬浮力、导向力、牵引力和制动力通过二系悬挂系统传递给车厢。
结构如图所示
3 载荷分析
磁悬浮车辆的整个模型可以认为包括6个自由度,即车厢的3个位移自由度和夹层结构的3个位移自由度。
通常体坐标系定义如下:
X轴代表磁悬浮车辆沿轨道前进的方向,相切于轨道的表面;Y轴在导轨平面内,从车辆的右向左,相切于轨道的表面;Z轴完全是遵循右手法则,垂直于导轨的表面。
vB=(u,v,w)B和ωB=(p,q,r)B分别代表车辆车体结构的速度和角速度(这里主要用车体说明,夹层结构的速度和角速度也可以如此表示,如vC和ωC。
)下角标B表示体坐标系。
在体坐标系统中根据牛顿的第二法则,车辆车体的惯性加速度可以表达为
式中:
u,v,w分别为速度在x,y,z方向上的3个分量;p,q,r分别是与速度和曲线轨道相关的参数;(F)B=FX,FY,FZ是作用在车体上的矢量力;m是质量。
3.1夹层作用力
悬浮车辆的夹层结构主要承受电磁牵引驱动力、导向力和磁悬浮力等。
1)沿X轴的作用力
式中:
Fp1为直线同步电机产生的驱动力;Gx为重力加速度在X方向的分量,主要取决于夹层重量以及车辆的侧滚角等因素;FCB-X为夹层和车厢之间沿X轴方向的耦合作用力;FP2为车辆和前车之间的耦合作用力,首车没有;Ff为车辆和跟随车辆之间的耦合作用力,尾车没有;Fa为气动阻力,它和车辆前进速度的平方成正比。
2)沿Y轴作用力
式中:
GY为重力加速度沿Y方向的分量;侧导向力FG=FG/Ri-FG/Le,FG/Ri和FG/Le分别是由车辆夹层结构右侧和左侧的侧导向系统产生的导向力;FCB-Y为夹层和车厢之间沿Y轴方向的耦合力。
3)沿Z轴作用力
悬浮力
式中:
GZ为重力加速度沿Z方向的分量,主要依赖于夹层结构的重量以及车辆的滚动;FCB-Z为夹层和车厢之间沿Z轴的耦合力;其他变量的具体含义见文献[1]。
3.2车体上的作用力
作用在车体上的力基本是由重力(含安装的设备)、空气阻力以及车厢和夹层之间的耦合作用力等组成。
可以简单的通过如下公式表示:
通过分析结构载荷受力状况,在进行磁悬浮车辆多体动力学研究的时候,就可以考虑如何准确简化系统多体模型。
一般在结构设计中,除了弹性部件外,当结构部件的弹性变形和刚性位移量级相当时,需将其中某些实体(车体、夹层或悬浮架的挠曲)视为弹性体来研究,而且在一个真实典型的情况中,对于载荷、应力、材料疲劳、振动或噪声的分析都应考虑结构的弹性变形。
这就要求在复杂多体系统研究时,有时要考虑研究对象的弹性问题。
在磁悬浮车辆多体系统中,车体和夹层结构一般作为刚体考虑,并根据它们的质量和几何特性分别进行定义。
在行驶过程中,空调等动力源由于高速回转会产生剧烈的振动,将成为激励源。
如果不忽略这些动力源引起的振动成分,最后得到的磁悬浮车辆激励源就是轨道激励和动力总成激励的共同作用的结果。
由于各部件的振动与整个车体振动很容易产生耦合,从而会产生复杂结构的振动非线性的变化,系统就很难识别。
因此在磁悬浮系统的一般动力学研究中,常假定空调这些动力源在行驶过程中不产生振动,只视为刚度较大的刚体。
技术系统介绍
概述
磁悬浮列车主要由悬浮系统、推进系统和导向系统三大部分组成,尽管可以使用与磁力无关的推进系统,但在目前的绝大部分设计中,这三部分的功能均由磁力来完成。
下面分别对这三部分所采用的技术进行介绍。
悬浮系统
目前悬浮系统的设计,可以分为两个方向,分别是德国所采用的常导型和日本所采用的超导型。
从悬浮技术上讲就是电磁悬浮系统(EMS)和电力悬浮系统(EDS)。
图4给出了两种系统的结构差别。
磁悬浮列车
(EMS)是一种吸力悬浮系统,是结合在机车上的电磁铁和导轨上的铁磁轨道相互排斥产生悬浮。
常导磁悬浮列车工作时,首先调整车辆下部的悬浮和导向电磁铁的电磁排斥力,与地面轨道两侧的绕组发生磁铁反作用将列车浮起。
在车辆下部的导向电磁铁与轨道磁铁的反作用下,使车轮与轨道保持一定的侧向距离,实现轮轨在水平方向和垂直方向的无接触支撑和无接触导向。
车辆与行车轨道之间的悬浮间隙为10毫米,是通过一套高精度电子调整系统得以保证的。
此外由于悬浮和导向实际上与列车运行速度无关,所以即使在停车状态下列车仍然可以进入悬浮状态。
(EDS)将磁铁使用在运动的机车上以在导轨上产生电流。
由于机车和导轨的缝隙减少时电磁斥力会增大,从而产生的电磁斥力提供了稳定的机车的支撑和导向。
然而机车必须安装类似车轮一样的装置对机车在“起飞”和“着陆”时进行有效支撑,这是因为EDS在机车速度低于大约25英里/小时无法保证悬浮。
EDS系统在低温超导技术下得到了更大的发展。
超导磁悬浮列车的最主要特征就是其超导元件在相当低的温度下所具有的完全导电性和完全抗磁性。
超导磁铁是由超导材料制成的超导线圈构成,它不仅电流阻力为零,而且可以传导普通导线根本无法比拟的强大电流,这种特性使其能够制成体积小功率强大的电磁铁。
LinearMotor原理图解
超导磁悬浮列车的车辆上装有车载超导磁体并构成感应动力集成设备,而列车的驱动绕组和悬浮导向绕组均安装在地面导轨两侧,车辆上的感应动力集成设备由动力集成绕组、感应动力集成超导磁铁和悬浮导向超导磁铁三部分组成。
当向轨道两侧的驱动绕组提供与车辆速度频率相一致的三相交流电时,就会产生一个移动的电磁场,因而在列车导轨上产生磁波,这时列车上的车载超导磁体就会受到一个与移动磁场相同步的推力,正是这种推力推动列车前进。
其原理就像冲浪运动一样,冲浪者是站在波浪的顶峰并由波浪推动他快速前进的。
与冲浪者所面对的难题相同,超导磁悬浮列车要处理的也是如何才能准确地驾驭在移动电磁波的顶峰运动的问题。
为此,在地面导轨上安装有探测车辆位置的高精度仪器,根据探测仪传来的信息调整三相交流电的供流方式,精确地控制电磁波形以使列车能良好地运行。
推进系统
磁悬浮列车的驱动运用同步直线电动机的原理。
车辆下部支撑电磁铁线圈的作用就像是同步直线电动机的励磁线圈,地面轨道内侧的三相移动磁场驱动绕组起到电枢的作用,它就像同步直线电动机的长定子绕组。
从电动机的工作原理可以知道,当作为定子的电枢线圈有电时,由于电磁感应而推动电机的转子转动。
同样,当沿线布置的变电所向轨道内侧的驱动绕组提供三相调频调幅电力时,由于电磁感应作用承载系统连同列车一起就像电机的“转子”一样被推动做直线运动。
从而在悬浮状态下,列车可以完全实现非接触的牵引和制动。
导向系统
导向系统是一种测向力来保证悬浮的机车能够沿着导轨的方向运动。
必要的推力与悬浮力相类似,也可以分为引力和斥力。
在机车底板上的同一块电磁铁可以同时为导向系统和悬浮系统提供动力,也可以采用独立的导向系统电磁铁。
发展历史
国外大事记
1922年,德国工程师赫尔曼·肯佩尔首次考虑电磁悬浮铁路。
1934年,赫尔曼·肯佩尔获得制造磁悬浮铁路的基本专利。
1935年,赫尔曼·肯佩尔运用试验模型证实了磁悬浮。
1939年-1943年,赫
 升级会员
升级会员 