P04机械转子陀螺仪-单自由度.ppt
《P04机械转子陀螺仪-单自由度.ppt》由会员分享,可在线阅读,更多相关《P04机械转子陀螺仪-单自由度.ppt(11页珍藏版)》请在冰豆网上搜索。
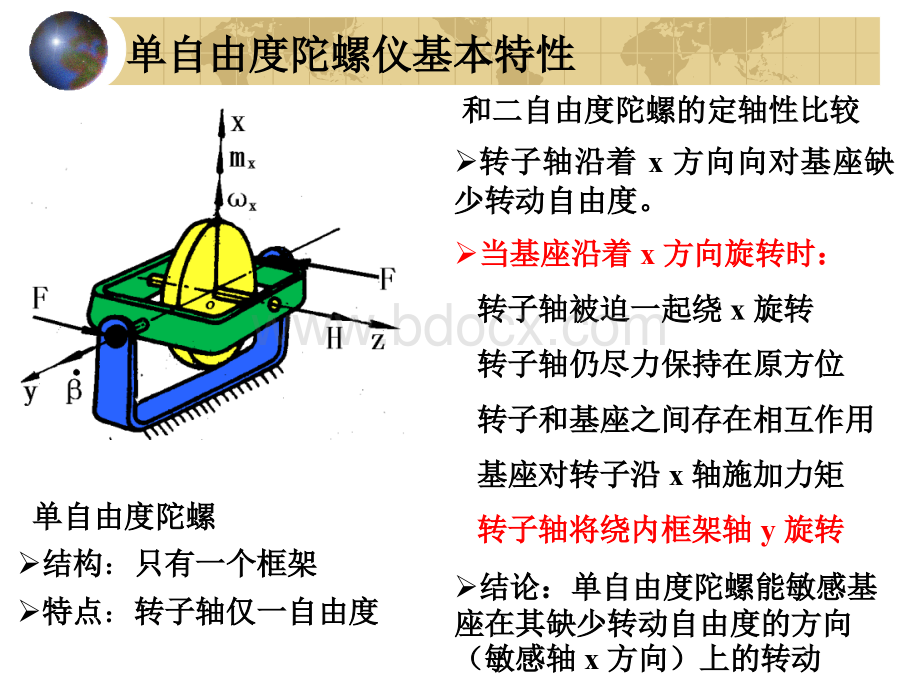
单自由度陀螺仪基本特性单自由度陀螺仪基本特性单自由度陀螺单自由度陀螺结构结构:
只有一个框架只有一个框架特点特点:
转子轴仅一自由度转子轴仅一自由度和二自由度陀螺的定轴性比较和二自由度陀螺的定轴性比较转转子子轴轴沿沿着着x方方向向向向对对基基座座缺缺少转动自由度。
少转动自由度。
当基座沿着当基座沿着x方向旋转时:
方向旋转时:
转子轴被迫一起绕转子轴被迫一起绕x旋转旋转转子轴仍尽力保持在原方位转子轴仍尽力保持在原方位转子和基座之间存在相互作用转子和基座之间存在相互作用基座对转子沿基座对转子沿x轴施加力矩轴施加力矩转子轴将绕内框架轴转子轴将绕内框架轴y旋转旋转结论:
单自由度陀螺能敏感基结论:
单自由度陀螺能敏感基座在其缺少转动自由度的方向座在其缺少转动自由度的方向(敏感轴(敏感轴x方向)上的转动方向)上的转动单自由度陀螺单自由度陀螺运动方程:
坐标系运动方程:
坐标系运动分析:
运动分析:
转转子子绕绕z轴轴旋旋转转;当当载载体体以以xb旋旋转转,强强迫迫内内框框架架一一同同旋旋转,内框架同时绕转,内框架同时绕y轴旋转。
轴旋转。
坐标系选取:
坐标系选取:
固定坐标系固定坐标系XYZ载载体体坐坐标标系系xbybzb(输入轴(输入轴xb)内框架坐标系内框架坐标系xyz转子坐标系转子坐标系xyz运运动动方方程程:
xb,需需用到:
用到:
动量矩定理动量矩定理苛氏转动坐标定理苛氏转动坐标定理单自由度陀螺单自由度陀螺运动方程:
矢量表示运动方程:
矢量表示11取内框架坐标系为动作标系取内框架坐标系为动作标系内框架相对载体的转动内框架相对载体的转动载体相对惯性空间的转动载体相对惯性空间的转动动作标系相对惯性空间的转动动作标系相对惯性空间的转动转子相对惯性空间的转动转子相对惯性空间的转动单自由度陀螺单自由度陀螺运动方程:
矢量表示运动方程:
矢量表示22转子的动量矩转子的动量矩实际中实际中非常小,非常小,H可简化成可简化成根据动量矩定理根据动量矩定理单自由度陀螺单自由度陀螺运动方程:
推导化简运动方程:
推导化简考虑到考虑到非常小,非常小,转子轴的运动只用转子轴的运动只用描述就描述就足够,故只取足够,故只取y轴分量轴分量或或忽略忽略MB与与Mf,简化得:
,简化得:
单自由度陀螺单自由度陀螺运动方程:
典型二阶系统运动方程:
典型二阶系统典型的二阶系统,可以改写成典型的二阶系统,可以改写成等效阻尼比等效阻尼比自由振荡频率自由振荡频率单自由度陀螺单自由度陀螺传递函数:
速率陀螺传递函数:
速率陀螺运动方程运动方程拉氏变换(零初始条件)拉氏变换(零初始条件)传递函数传递函数单轴陀螺的分类(根据单轴陀螺的分类(根据c,k的不同)的不同)1、当、当c0,k0,借助,借助和和n,得到,得到传递函数传递函数稳态时稳态时称速率陀螺仪称速率陀螺仪单自由度陀螺单自由度陀螺传递函数:
积分陀螺传递函数:
积分陀螺2、当、当c0,k=0,得到得到整理得整理得令令=Jy/c,得到,得到传递函数传递函数传递函数:
积分传递函数:
积分+惯性环节惯性环节稳态响应:
稳态响应:
正比于输入的积分正比于输入的积分惯性环节:
惯性环节:
的大小选取的大小选取单自由度速率陀螺单自由度速率陀螺阶跃响应:
求解阶跃响应:
求解1、速率陀螺的阶跃响应、速率陀螺的阶跃响应传递函数传递函数其中其中系统输入系统输入系统输出系统输出反拉氏变换:
反拉氏变换:
单自由度速率陀螺单自由度速率陀螺阶跃响应:
曲线阶跃响应:
曲线以以为稳定位置的衰减振荡,其中为稳定位置的衰减振荡,其中稳定条件:
稳定条件:
0,一般取一般取0.50.8。
稳态转角输出稳态转角输出单自由度积分陀螺单自由度积分陀螺阶跃响应阶跃响应2、积分陀螺的阶跃响应、积分陀螺的阶跃响应传递函数传递函数输出函数输出函数如果如果=Jy/c=0,则,则或写成或写成
 升级会员
升级会员 