#《运动控制》课程复习.docx
《#《运动控制》课程复习.docx》由会员分享,可在线阅读,更多相关《#《运动控制》课程复习.docx(28页珍藏版)》请在冰豆网上搜索。
#《运动控制》课程复习
《运动控制》课程复习大纲王一开编
第一部分:
填空题+简答题
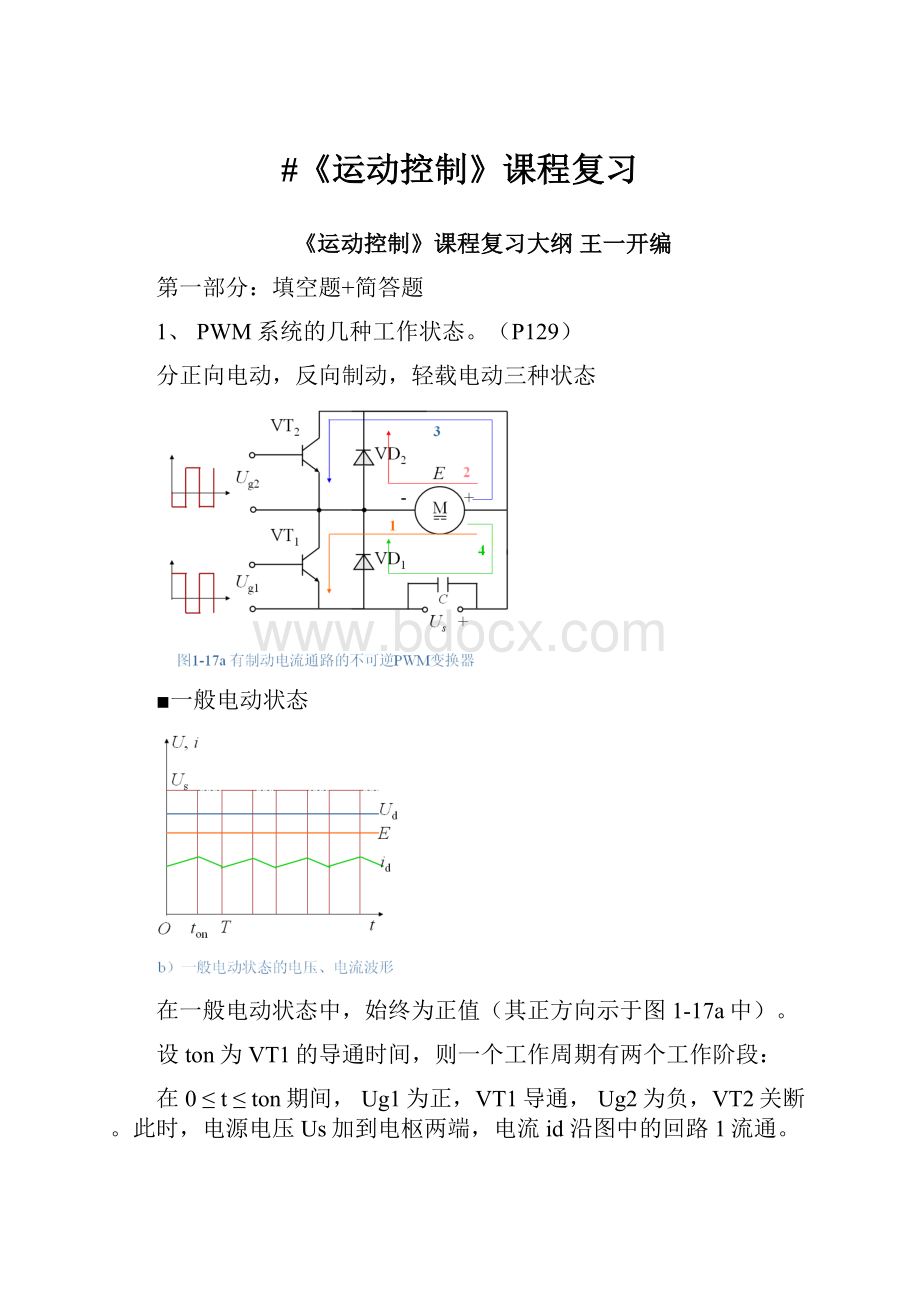
1、PWM系统的几种工作状态。
(P129)
分正向电动,反向制动,轻载电动三种状态
■一般电动状态
在一般电动状态中,始终为正值(其正方向示于图1-17a中)。
设ton为VT1的导通时间,则一个工作周期有两个工作阶段:
在0≤t≤ton期间,Ug1为正,VT1导通,Ug2为负,VT2关断。
此时,电源电压Us加到电枢两端,电流id沿图中的回路1流通。
在ton≤t≤T期间,Ug1和Ug2都改变极性,VT1关断,但VT2却不能立即导通,因为id沿回路2经二极管VD2续流,在VD2两端产生的压降给VT2施加反压,使它失去导通的可能。
因此,实际上是由VT1和VD2交替导通,虽然电路中多了一个功率开关器件,但并没有被用上。
■制动状态
在制动状态中,id为负值,VT2就发挥作用了。
这种情况发生在电动运行过程中需要降速的时候。
这时,先减小控制电压,使Ug1的正脉冲变窄,负脉冲变宽,从而使平均电枢电压Ud降低。
但是,由于机电惯性,转速和反电动势E还来不及变化,因而造成E>Ud的局面,很快使电流id反向,VD2截止,VT2开始导通。
制动状态的一个周期分为两个工作阶段:
在0≤t≤ton期间,VT2关断,-id沿回路4经VD1续流,向电源回馈制动,与此同时,VD1两端压降钳住VT1使它不能导通。
在ton≤t≤T期间,Ug2变正,于是VT2导通,反向电流id沿回路3流通,产生能耗制动作用。
因此,在制动状态中,VT2和VD1轮流导通,而VT1始终是关断的,此时的电压和电流波形示于图1-17c。
■轻载电动状态
有一种特殊情况,即轻载电动状态,这时平均电流较小,以致在关断后经续流时,还没有到达周期T,电流已经衰减到零,此时,VT2因而两端电压也降为零,便提前导通了,使电流方向变动,产生局部时间的制动作用。
轻载电动状态,一个周期分成四个阶段:
第1阶段,VD1续流,电流–id沿回路4流通;
第2阶段,VT1导通,电流id沿回路1流通;
第3阶段,VD2续流,电流id沿回路2流通;
第4阶段,VT2导通,电流–id沿回路3流通。
在1、4阶段,电动机流过负方向电流,电机工作在制动状态;
在2、3阶段,电动机流过正方向电流,电机工作在电动状态。
因此,在轻载时,电流可在正负方向之间脉动,平均电流等于负载电流,其输出波形见图1-17d。
2、
直流电机的三种基本调速方法(P1)
(1)调节电枢供电电压U;
■工作条件:
保持励磁Φ=ΦN;
保持电阻R=Ra
■调节过程:
改变电压UN→U↓
U↓→n↓,n0↓
■调速特性:
转速下降,机械特性曲线平行下移。
(2)减弱励磁磁通Φ;
■工作条件:
保持电压U=UN;
保持电阻R=Ra;
■调节过程:
减小励磁ΦN→↓Φ
Φ↓→n↑,n0↑
■调速特性:
转速上升,机械特性曲线变软。
(3)改变电枢回路电阻R。
■工作条件:
保持励磁Φ=ΦN;
保持电压U=UN;
■调节过程:
增加电阻Ra→R↑
R↑→n↓,n0不变;
■调速特性:
转速下降,机械特性曲线变软。
三种调速方法的性能与比较
对于要求在一定范围内无级平滑调速的系统来说,以调节电枢供电电压的方式为最好。
改变电阻只能有级调速;减弱磁通虽然能够平滑调速,但调速范围不大,往往只是配合调压方案,在基速(即电机额定转速)以上作小范围的弱磁升速。
因此,自动控制的直流调速系统往往以调压调速为主。
怎样才能近似的实现转速负反馈?
(P43)
答:
如果忽略电枢压降,则直流电动机的转速近似与电枢两端电压成正比,所以电压负反馈基本上能够代替转速负反馈的作用,从而替代复杂的利用测速发电机测转速的方法。
直流电机弱磁调速适合带什么负载?
直流电机调压调速适合带什么负载?
(P99)
答:
调压调速适合带恒转矩性质的负载,弱磁调速适合带恒功率性质的负载。
3、系统稳定的充要条件
背记版
连续系统稳定的充要条件:
闭环传函的根位于S平面的左半平面
离散系统稳定的充要条件:
闭环脉冲传函的根位于单位圆之内
理论版
反馈控制闭环直流调速系统的特征方程为:
它的一般表达式为
根据三阶系统的劳斯-古尔维茨判据,系统稳定的充分必要条件是:
式中的各项系数显然都是大于零的,因此稳定条件就只有
或
整理后得
式中右边称作系统的临界放大系数Kcr,当K≥Kcr时,系统将不稳定。
对于一个自动控制系统来说,稳定性是它能否正常工作的首要条件,是必须保证的。
4、典型系统(P60~P69)
一般来说,许多控制系统的开环传递函数都可表示为 :
上式中,分母中的sr项表示该系统在原点处有r重极点,或者说,系统含有r个积分环节。
根据r=0,1,2,……等不同数值,分别称作0型、I型、Ⅱ型、……系统。
为什么不用Ⅲ型及Ⅲ型以上的系统?
答:
自动控制理论已经证明,0型系统稳态精度低,而Ⅲ型和Ⅲ型以上的系统很难稳定。
因此,为了保证稳定性和较好的稳态精度,多选用I型和II型系统。
典型I型系统
结构图与传递函数
式中T—系统的惯性时间常数;
K—系统的开环增益。
开环对数频率特性:
■性能特性
典型的I型系统结构简单,其对数幅频特性的中频段以–20dB/dec的斜率穿越0dB线,只要参数的选择能保证足够的中频带宽度,系统就一定是稳定的,且有足够的稳定裕量,即选择参数满足
或
于是,相角稳定裕度
典型Ⅱ型系统
结构图和传递函数
⏹开环对数频率特性
■性能特性
典型的II型系统也是以–20dB/dec的斜率穿越零分贝线。
由于分母中s2项对应的相频特性是–180°,后面还有一个惯性环节,在分子添上一个比例微分环节(τs+1),是为了把相频特性抬到–180°线以上,以保证系统稳定,即应选择参数满足
或
且τ比T大得越多,系统的稳定裕度越大。
相关链接:
矫正成两种典型系统时调节器的选择。
(P69两张表)
5、PD,PID,PI调节器
PD——比例微分调节
PID——比例积分微分调节
PI——比例积分调节
重点介绍PI调节器
PI调节器是电力拖动自动控制系统中最常用的一种控制器,在微机数字控制系统中,当采样频率足够高时,可以先按模拟系统的设计方法设计调节器,然后再离散化,就可以得到数字控制器的算法,这就是模拟调节器的数字化。
PI调节器的传递函数:
■PI调节器时域表达式:
其中Kp=Kpi为比例系数
KI=1/τ为积分系数
数字PI调节器算法:
有位置式和增量式两种算法
7、常用的可控直流电源
旋转变流机组(G-M)——用交流电动机和直流发电机组成机组,以获得可调的直流电压。
G-M系统工作原理:
由原动机(柴油机、交流异步或同步电动机)拖动直流发电机G实现变流,由G给需要调速的直流电动机M供电,调节G的励磁电流if即可改变其输出电压U,从而调节电动机的转速n。
这样的调速系统简称G-M系统,国际上通称Ward-Leonard系统。
静止式可控整流器(V-M)——用静止式的可控整流器,以获得可调的直流电压。
V-M系统工作原理
晶闸管-电动机调速系统(简称V-M系统,又称静止的Ward-Leonard系统),图中VT是晶闸管可控整流器,通过调节触发装置GT的控制电压Uc来移动触发脉冲的相位,即可改变整流电压Ud,从而实现平滑调速。
V-M系统的特点:
与G-M系统相比较:
⏹晶闸管整流装置不仅在经济性和可靠性上都有很大提高,而且在技术性能上也显示出较大的优越性。
晶闸管可控整流器的功率放大倍数在104以上,其门极电流可以直接用晶体管来控制,不再像直流发电机那样需要较大功率的放大器。
⏹在控制作用的快速性上,变流机组是秒级,而晶闸管整流器是毫秒级,这将大大提高系统的动态性能。
V-M系统的问题:
⏹由于晶闸管的单向导电性,它不允许电流反向,给系统的可逆运行造成困难。
⏹晶闸管对过电压、过电流和过高的dV/dt与di/dt都十分敏感,若超过允许值会在很短的时间内损坏器件。
⏹由谐波与无功功率引起电网电压波形畸变,殃及附近的用电设备,造成“电力公害”。
直流斩波器或脉宽调制变换器(PWM)——用恒定直流电源或不控整流电源供电,利用电力电子开关器件斩波或进行脉宽调制,以产生可变的平均电压。
直流斩波器的基本结构:
斩波器的基本控制原理:
:
在原理图中,VT表示电力电子开关器件,VD表示续流二极管。
当VT导通时,直流电源电压Us加到电动机上;当VT关断时,直流电源与电机脱开,电动机电枢经VD续流,两端电压接近于零。
如此反复,电枢端电压波形如图1-5b,好像是电源电压Us在ton时间内被接上,又在T–ton时间内被斩断,故称“斩波”。
输出电压计算:
电动机得到的平均电压为:
式中T—晶闸管的开关周期;
ton—开通时间;
ρ—占空比,ρ=ton/T=tonf;
其中f为开关频率。
PWM系统的优点:
(1)主电路线路简单,需用的功率器件少;
(2)开关频率高,电流容易连续,谐波少,电机损耗及发热都较小;
(3)低速性能好,稳速精度高,调速范围宽,可达1:
10000左右;
(4)若与快速响应的电机配合,则系统频带宽,动态响应快,动态抗扰能力强;
(5)功率开关器件工作在开关状态,导通损耗小,当开关频率适当时,开关损耗也不大,因而装置效率较高;
(6)直流电源采用不控整流时,电网功率因数比相控整流器高。
8、限流保护——电流截止负反馈
为了解决反馈闭环调速系统的起动和堵转时电流过大的问题,系统中必须有自动限制电枢电流的环节。
根据反馈控制原理,要维持哪一个物理量基本不变,就应该引入那个物理量的负反馈。
那么,引入电流负反馈,应该能够保持电流基本不变,使它不超过允许值。
考虑到,限流作用只需在起动和堵转时起作用,正常运行时应让电流自由地随着负载增减。
如果采用某种方法,当电流大到一定程度时才接入电流负反馈以限制电流,而电流正常时仅有转速负反馈起作用控制转速。
这种方法叫做电流截止负反馈,简称截流反馈。
电流截止负反馈环节:
系统稳态结构:
静特性方程与特性曲线:
由图1-31可写出该系统两段静特性的方程式。
当Id≤Idcr时,电流负反馈被截止,静特性和只有转速负反馈调速系统的静特性式相同:
当Id>Idcr时,引入了电流负反馈,静特性变成
电流截止负反馈环节参数设计
⏹Idbl应小于电机允许的最大电流,一般取:
Idbl=(1.5~2)IN
⏹从调速系统的稳态性能上看,希望稳态运行范围足够大,截止电流应大于电机的额定电流,一般取:
Idcr≥(1.1~1.2)IN
9、串电抗器的目的:
减小电流脉动,维持电流连续。
10、转速、电流双闭环直流调速系统
系统的组成
、
图中,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
系统原理图:
图中表出,两个调节器的输出都是带限幅作用的。
■转速调节器ASR的输出限幅电压U*im决定了电流给定电压的最大值;
■电流调节器ACR的输出限幅电压Ucm限制了电力电子变换器的最大输出电压Udm
稳态结构图和静特性:
为了分析双闭环调速系统的静特性,必须先绘出它的稳态结构图,如下图。
它可以很方便地根据上图的原理图画出来,只要注意用带限幅的输出特性表示PI调节器就可以了。
分析静特性的关键是掌握这样的PI调节器的稳态特征。
系统稳态结构图:
限幅作用存在两种状况:
⏹饱和——输出达到限幅值
当调节器饱和时,输出为恒值,输入量的变化不再影响输出,除非有反向的输入信号使调节器退出饱和;换句话说,饱和的调节器暂时隔断了输入和输出间的联系,相当于使该调节环开环。
⏹不饱和——输出未达到限幅值
当调节器不饱和时,正如1.6节中所阐明的那样,PI作用使输入偏差电压在稳态时总是零。
系统静特性
实际上,在正常运行时,电流调节器是不会达到饱和状态的。
因此,对于静特性来说,只有转速调节器饱和与不饱和两种情况。
双闭环直流调速系统的静特性如图所示,
两个调节器的作用
⏹双闭环调速系统的静特性在负载电流小于Idm时表现为转速无静差,这时,转速负反馈起主要调节作用。
⏹当负载电流达到Idm后,转速调节器饱和,电流调节器起主要调节作用,系统表现为电流无静差,得到过电流的自动保护。
这就是采用了两个PI调节器分别形成内、外两个闭环的效果。
这样的静特性显然比带电流截止负反馈的单闭环系统静特性好。
然而实际上运算放大器的开环放大系数并不是无穷大,特别是为了避免零点飘移而采用“准PI调节器”时,静特性的两段实际上都略有很小的静差,如上图中虚线所示。
双闭环直流调速系统的数学模型和动态性能分析
数学模型:
图中WASR(s)和WACR(s)分别表示转速调节器和电流调节器的传递函数。
如果采用PI调节器,则有(p36-37)
双闭环直流调速系统的起动过程分析
设置双闭环控制的一个重要目的就是要获得接近理想起动过程,因此在分析双闭环调速系统的动态性能时,有必要首先探讨它的起动过程。
双闭环直流调速系统突加给定电压U*n由静止状态起动时,转速和电流的动态过程示于下图。
起动过程:
由于在起动过程中转速调节器ASR经历了不饱和、饱和、退饱和三种情况,整个动态过程就分成图中标明的I、II、III三个阶段。
第I阶段电流上升的阶段(0~t1)
⏹突加给定电压U*n后,Id上升,当Id小于负载电流IdL时,电机还不能转动。
⏹当Id≥IdL后,电机开始起动,由于机电惯性作用,转速不会很快增长,因而转速调节器ASR的输入偏差电压的数值仍较大,其输出电压保持限幅值U*im,强迫电流Id迅速上升。
⏹直到,Id=Idm,Ui=U*im电流调节器很快就压制Id了的增长,标志着这一阶段的结束。
在这一阶段中,ASR很快进入并保持饱和状态,而ACR一般不饱和。
第II阶段恒流升速阶段(t1~t2)
⏹在这个阶段中,ASR始终是饱和的,转速环相当于开环,系统成为在恒值电流给定U*im下的电流调节系统,基本上保持电流Id恒定,因而系统的加速度恒定,转速呈线性增长。
⏹与此同时,电机的反电动势E也按线性增长,对电流调节系统来说,E是一个线性渐增的扰动量,为了克服它的扰动,Ud0和Uc也必须基本上按线性增长,才能保持Id恒定。
⏹当ACR采用PI调节器时,要使其输出量按线性增长,其输入偏差电压必须维持一定的恒值,也就是说,Id应略低于Idm。
恒流升速阶段是起动过程中的主要阶段。
为了保证电流环的主要调节作用,在起动过程中ACR是不应饱和的,电力电子装置UPE的最大输出电压也须留有余地,这些都是设计时必须注意的。
第Ⅲ阶段转速调节阶段(t2以后)
⏹当转速上升到给定值时,转速调节器ASR的输入偏差减少到零,但其输出却由于积分作用还维持在限幅值U*im,所以电机仍在加速,使转速超调。
⏹转速超调后,ASR输入偏差电压变负,使它开始退出饱和状态,U*i和Id很快下降。
但是,只要Id仍大于负载电流IdL,转速就继续上升。
直到Id=IdL时,转矩Te=TL,则dn/dt=0,转速n才到达峰值(t=t3时)。
此后,电动机开始在负载的阻力下减速,与此相应,在一小段时间内(t3~t4),Id在这最后的转速调节阶段内,ASR和ACR都不饱和,ASR起主导的转速调节作用,而ACR则力图使Id尽快地跟随其给定值U*i,或者说,电流内环是一个电流随动子系统。
综上所述,双闭环直流调速系统的起动过程有以下三个特点:
(1)饱和非线性控制;
根据ASR的饱和与不饱和,整个系统处于完全不同的两种状态:
当ASR饱和时,转速环开环,系统表现为恒值电流调节的单闭环系统;
当ASR不饱和时,转速环闭环,整个系统是一个无静差调速系统,而电流内环表现为电流随动系统。
(2)转速超调;
由于ASR采用了饱和非线性控制,起动过程结束进入转速调节阶段后,必须使转速超调,ASR的输入偏差电压△Un为负值,才能使ASR退出饱和。
这样,采用PI调节器的双闭环调速系统的转速响应必然有超调。
(3)准时间最优控制。
起动过程中的主要阶段是第II阶段的恒流升速,它的特征是电流保持恒定。
一般选择为电动机允许的最大电流,以便充分发挥电动机的过载能力,使起动过程尽可能最快。
这阶段属于有限制条件的最短时间控制。
因此,整个起动过程可看作为是一个准时间最优控制。
最后,应该指出,对于不可逆的电力电子变换器,双闭环控制只能保证良好的起动性能,却不能产生回馈制动,在制动时,当电流下降到零以后,只好自由停车。
必须加快制动时,只能采用电阻能耗制动或电磁抱闸。
11、泵升电压产生的原因和抑制方法
泵升电压产生的原因:
对于PWM变换器中的滤波电容,其作用除滤波外,还有当电机制动时吸收运行系统动能的作用。
由于直流电源靠二极管整流器供电,不可能回馈电能,电机制动时只好对滤波电容充电,这将使电容两端电压升高,称作“泵升电压”。
泵升电压限制
电力电子器件的耐压限制着最高泵升电压,因此电容量就不可能很小,一般几千瓦的调速系统所需的电容量达到数千微法。
在大容量或负载有较大惯量的系统中,不可能只靠电容器来限制泵升电压,这时,可以采用下图中的镇流电阻Rb来消耗掉部分动能。
分流电路靠开关器件VTb在泵升电压达到允许数值时接通。
对于更大容量的系统,为了提高效率,可以在二极管整流器输出端并接逆变器,把多余的能量逆变后回馈电网。
当然,这样一来,系统就更复杂了。
12、随动系统讲究跟随指标,恒值系统讲究抗扰指标。
13、异步交流电机变频器上电压和频率为什么要协调控制?
在进行电机调速时,常须考虑的一个重要因素是:
希望保持电机中每极磁通量Φm为额定值不变。
如果磁通太弱,没有充分利用电机的铁心,是一种浪费;如果过分增大磁通,又会使铁心饱和,从而导致过大的励磁电流,严重时会因绕组过热而损坏电机。
在交流异步电机中,磁通Φm由定子和转子磁势合成产生,因为有
,此式可知,只要控制好Eg和f1,便可达到控制磁通Φm的目的。
14、异步电动机电压、频率有几种协调方法?
(P215——P218)
a.恒压频比控制(Us/ω1)
机械特性曲线:
b.恒Eg/ω1控制
下图再次绘出异步电机的稳态等效电路,图中几处感应电动势的意义如下:
•Eg—气隙(或互感)磁通在定子每相绕组中的感应电动势;
•Es—定子全磁通在定子每相绕组中的感应电动势;
•Er—转子全磁通在转子绕组中的感应电动势(折合到定子边)。
c.恒Er/ω1控制
几种电压-频率协调控制方式的特性比较
在正弦波供电时,按不同规律实现电压-频率协调控制可得不同类型的机械特性。
(1)恒压频比(Us/ω1=Constant)控制最容易实现,它的变频机械特性基本上是平行下移,硬度也较好,能够满足一般的调速要求,但低速带载能力有些差强人意,须对定子压降实行补偿。
(2)恒Eg/ω1控制是通常对恒压频比控制实行电压补偿的标准,可以在稳态时达到Φrm=Constant,从而改善了低速性能。
但机械特性还是非线性的,产生转矩的能力仍受到限制。
(3)恒Er/ω1控制可以得到和直流他励电机一样的线性机械特性,按照转子全磁通Φrm恒定进行控制,即得Er/ω1=Constant
而且,在动态中也尽可能保持Φrm恒定是矢量控制系统的目标,当然实现起来是比较复杂的。
15、异步电动机改变电压时的机械特性(P191)
异步电动机机械特性:
由图5-4可见,带恒转矩负载工作时,普通笼型异步电机变电压时的稳定工作点为A、B、C,转差率s的变化范围不超过0~sm,调速范围有限。
如果带风机类负载运行,则工作点为D、E、F,调速范围可以大一些。
为了能在恒转矩负载下扩大调速范围,并使电机能在较低转速下运行而不致过热,就要求电机转子有较高的电阻值,这样的电机在变电压时的机械特性绘于图5-5。
显然,带恒转矩负载时的变压调速范围增大了,堵转工作也不致烧坏电机,这种电机又称作交流力矩电机。
16、交流电机如果全压启动,启动电流是额定电流的4~7倍;启动转矩是额定转矩的0.7~1.3倍。
第二部分:
计算题
1、给出单闭环或双闭环的动静传函结构图,要求简化结构图并进行求传函等基础性处理。
(建议翻看自控原理结构图简化的相关内容)
2、作业本习题(三题之一)
3、双闭环稳态计算(参见第一部分第10考点)
双闭环各变量的稳态工作点和稳态参数计算:
双闭环调速系统在稳态工作中,当两个调节器都不饱和时,各变量之间有下列关系:
上述关系表明,在稳态工作点上,
■转速n是由给定电压U*n决定的;
■ASR的输出量U*i是由负载电流IdL决定的;
■控制电压Uc的大小则同时取决于n和Id,或者说,同时取决于U*n和IdL。
反馈系数计算
双闭环调速系统的稳态参数计算与单闭环有静差系统完全不同,而是和无静差系统的稳态计算相似,即根据各调节器的给定与反馈值计算有关的反馈系数:
转速反馈系数:
电流反馈系数:
两个给定电压的最大值U*nm和U*im由设计者选定,设计原则如下:
⏹U*nm受运算放大器允许输入电压和稳压电源的限制;
⏹U*im为ASR的输出限幅值。
复习提示:
上述总结的各知识点均出自老师复习课时公布的内容,但由于各方面原因,复习范围肯定有所局限,大家还是应该在此材料的基础上,结合上课笔记和老师平时所授,充分挖掘潜在易考点,尽量补充该资料。
建议大家应将复习重点放在直流系统的调速方式、双闭环系统稳态/动态性能分析以及异步电动机变压变频调速系统这三个内容上,即第一、二、七章对应知识章节,具体考点可详见上述归纳。
祝大家在大学本科学习的最后一门专业课考试当中取得优异成绩!
 升级会员
升级会员 