过程控制实验指导书.docx
《过程控制实验指导书.docx》由会员分享,可在线阅读,更多相关《过程控制实验指导书.docx(12页珍藏版)》请在冰豆网上搜索。
过程控制实验指导书
过程控制实验指导书
实验一:
对象动态特性
实验目的:
1、学习被控对象动态特性的工程测试方法。
2、掌握被控对象动态特性特征参数的求取方法。
实验要求:
1、预习被控对象有关章节;安排好实验计划;作好前期准备。
2、依据实验曲线求取被控对象动态特性的特征参数。
实验内容:
1、对象的动态特性:
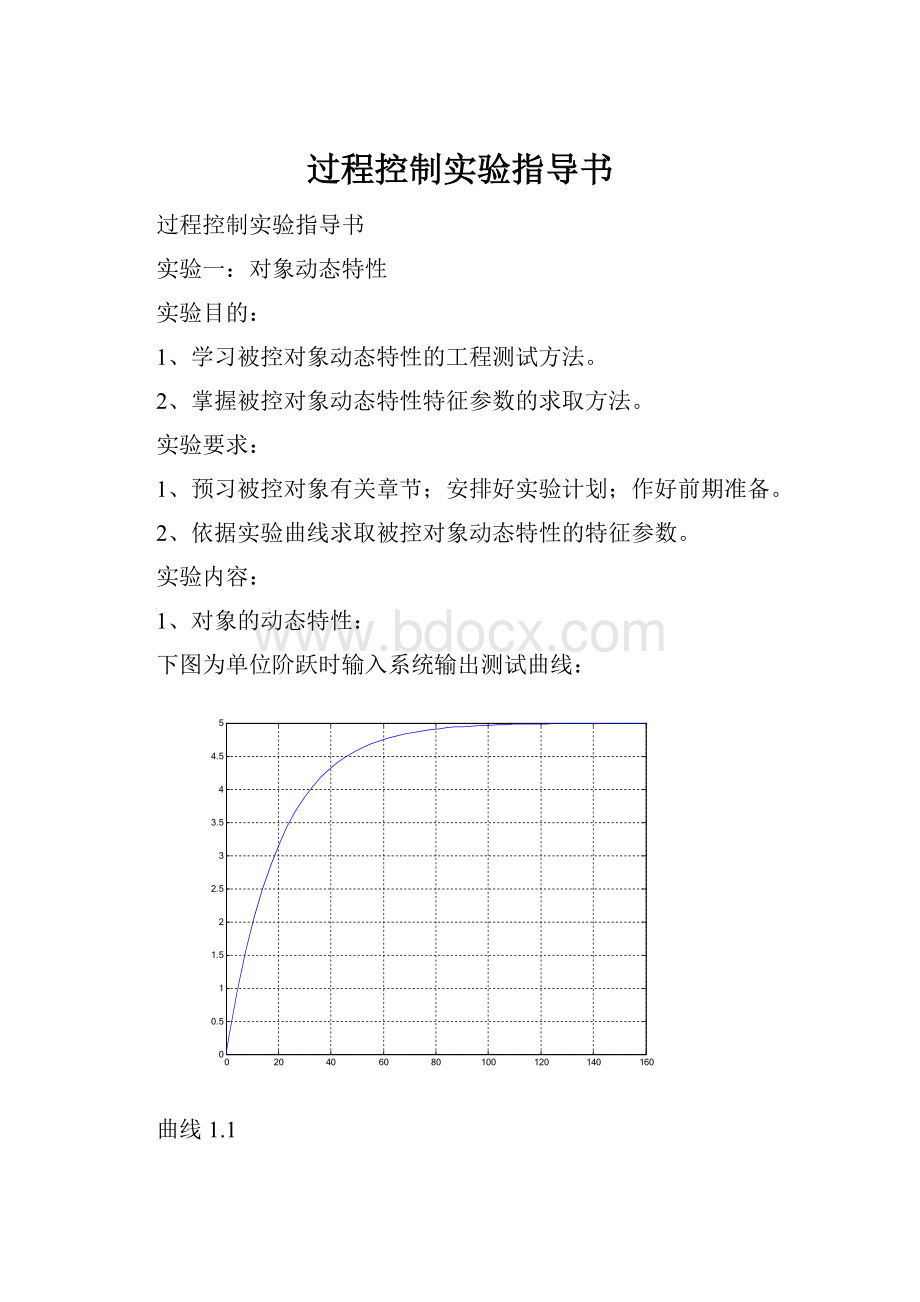
下图为单位阶跃时输入系统输出测试曲线:
曲线1.1
曲线1.2
曲线1.3
实验报告:
⑴依据曲线1.1、1.2和1.3求取对象动态特性的特征参数(K、T、τ)。
由此确定闭环系统模型。
⑵分别确定系统开环传递函数,并分别画出单位负反馈时系统动态结构图。
⑶用SIMULINK构建系统,比较仿真曲线与输出测试曲线。
⑷比较曲线1.1、1.2和1.3,说明不同系统的动态特性在运动形态、特征参数等方面的异同。
实验二:
调节器控制规律
实验目的:
1、熟悉SIMULINK调节器模块的使用方法。
2、掌握调节器控制规律特征参数的整定方法。
实验要求:
1、预习调节器有关章节;安排好实验计划;作好前期准备。
2、用工程测试法绘制调节器的输出特性,求取PID参数。
实验内容:
被控对象分别为
和
分别对以上系统,构建下述调节器,研究调节器对输出特性的影响:
1、比例调节器的输出特性:
⑴用SIMULINK构建比例控制系统。
⑵设定值为单位阶跃信号,改变比例调节器的大小,观察对系统的影响。
2、比例积分调节器的输出特性:
⑴用SIMULINK构建比例积分控制系统。
⑵设定值为单位阶跃信号,改变比例积分调节器的大小,观察对系统的影响。
注意调节器的整定顺序。
3、比例微分调节器的输出特性:
⑴用SIMULINK构建比例微分控制系统。
⑵改变比例微分调节器的大小,观察对系统的影响。
注意调节器的整定顺序。
4、比例积分微分调节器的输出特性:
⑴用SIMULINK构建比例积分微分控制系统。
⑵改变比例积分微分调节器的大小,观察对系统的影响。
注意调节器的整定顺序。
实验报告:
1、数据整理:
⑴比较上述四种调节器对输出特性的影响规律。
⑵比较和总结比例调节器与比例积分调节器输出特性的差异;说明积分时间的概念以及对输出特性的影响规律。
⑶比较和总结比例调节器与比例微分调节器输出特性的差异;
说明微分时间的概念以及对输出特性的影响规律。
实验三:
单回路控制系统
实验目的:
1、学习单回路控制系统的工程整定方法。
2、了解调节器参数对控制过程动态品质指标的影响规律。
3、了解各类扰动对控制过程动态品质指标影响的差异。
实验要求:
被控系统为三容对象,如下所示:
1、用两种不同的工程整定方法(其中一种为衰减曲线法)整定同一个被控对象。
2、保持最佳参数,改变扰动的形式和位置,观察、记录各类扰动对控制过程的影响。
3、“看曲线,调参数”,将三容对象的控制过程调整为最佳。
实验内容:
1、临界比例度法:
⑴用SIMULINK构建三容对象的控制系统。
⑵调整比例参数K,使系统输出为临界振荡。
确定相应参数。
⑶确定P、PI、PID调节时的调节器参数。
⑷运行SIMULINK,观察响应曲线。
⑸系统稳定后,在不同位置加入扰动信号,观察对输出的影响;改变调节器或调节器参数,使输出曲线达到最佳,观察、记录响应曲线。
2、衰减曲线法:
⑴调整比例参数K,使系统输出为4:
1衰减。
确定相应参数。
⑵确定P、PI、PID调节时的调节器参数。
⑶运行SIMULINK,观察响应曲线。
⑷系统稳定后,在不同位置加入扰动信号,观察对输出的影响;改变调节器或调节器参数,使输出曲线达到最佳,观察、记录响应曲
线。
实验报告:
1、绘制曲线
⑴由临界比例度法计算参数求得的PI控制规律过程曲线;
⑵由衰减曲线法计算参数求得的PI控制规律过程曲线;
⑶经过调整PI参数求得的最佳PI控制规律过程曲线;
⑷增加微分作用并作适当调整后求得的PID控制规律过程曲线;
⑸在第1传递函数后加扰动求得的PID控制规律过程曲线;
⑹在第3传递函数后加扰动求得的PID控制规律过程曲线;
⑺用上述任何一种工程整定方法求得的最佳P控制规律过程曲线。
2、数据整理:
⑴比较两种工程整定法使用的方便程度和准确程度。
⑵用P系统曲线与相应PI系统曲线比较两种控制规律的特点和应用范围。
⑶用比较微分控制规律对控制过程动态品质指标的影响。
⑷比较同类型、不同位置扰动对控制过程动态品质指标的影响规律。
⑸比较不类型扰动对控制过程动态品质指标的影响规律。
实验四:
串级控制系统
实验目的:
1、学习串级控制系统的工程整定方法。
2、了解主、副调节器参数对控制过程动态品质指标的影响规律。
3、了解串级控制系统对各类扰动控制过程动态品质指标影响的差异。
实验要求:
1、预习串级控制系统有关章节;安排好实验计划;作好前期准备。
2、以第三水柱液位作主参数、第一水柱液位作副参数,组成串级控制系统。
3、用一步整定法整定被控对象。
4、改变扰动的形式和位置,观察、记录各类扰动对控制过程的影响。
实验内容:
被控系统为三容对象,如下所示:
1、一步整定法:
⑴第3水柱的液位保持在100cm。
⑵调节器:
纯比例、手动。
调整主调节器的手动输出,使第3水柱的液位稳定在50%左右)。
⑶用衰减曲线法整定主调节器(将副回路视作一部分对象,只整定主调节器参数)。
⑸系统稳定后,将主调节器设定值阶跃增20%,观察、记录主参数的控制过程。
2、两步整定法:
⑴求取副调节器的δ2S和T2S(闭合主、副回路,两个调节器都置于纯比例、自动;置δ1=100%;用衰减曲线法求取副调节器的δ2S和T2S)。
⑵求取主调节器的δ1S和T1S(闭合主、副回路,两个调节器都置于纯比例、自动;置δ2=δ2S;用衰减曲线法求取主调节器的δ1S和T1S)。
⑶计算调节器参数(依据以上求得的δ1S、T1S和δ2、T2S;主、副调节器的选型以及衰减曲线法相关公式,求取主、副调节器的相关参数)。
⑷将计算参数置于调节器;将副调节器置串级,主调节器投自动。
⑸系统稳定后,将主调节器设定值阶跃增20%,观察、记录主参数的控制过程。
3、变换扰动位置,记录控制过程:
⑴为第1水柱加扰动(系统稳定下,在第1水柱上加阶跃扰动,幅值为20cm。
)。
⑵记录主参数的控制过程和副参数的控制过程。
⑶为第3水柱加扰动(系统稳定下,在第3水柱上加阶跃扰动,幅值为20cm。
)。
⑷记录主参数的控制过程和副参数的控制过程。
实验数据:
1、绘制曲线:
⑴由一步整定法求得的控制过程曲线;
⑵由两步整定法求得的控制过程曲线;
⑶在第1水柱处加扰动求得的主参数控制过程和副参数的控制过程;
⑷在第3水柱处加扰动求得的主参数控制过程和副参数的控制过程。
2、记录参数:
认真记录对应上述各曲线的实验条件和调节器参数。
实验报告:
1、数据整理:
⑴比较两种工程整定法使用的方便程度和准确程度。
⑵与单回路控制系统比较,说明两种控制系统对设定值扰动的控制过程动态品质指标。
2、心得体会:
实验五:
前馈控制系统
实验目的:
1、学习前馈控制系统工程整定方法。
2、研究前馈补偿器参数对控制过程的影响规律。
3、掌握前馈-反馈控制系统的特点和整定、投运方法。
实验要求:
1、预习前馈控制系统有关章节;安排好实验计划;作好前期准备。
2、以第三水柱液位作被控参数、第一水柱液位作前馈信号,搭建前馈-反馈控制系统。
3、用超前-滞后环节作前馈补偿器,组成静态前馈和动态前馈补偿模型。
4、观察、记录单纯前馈和前馈-反馈系统的控制过程。
实验内容:
加干扰的被控系统为如下所示:
1、静态前馈补偿:
⑴第3水柱的液位保持在100cm。
⑵建立初稳态(干扰输入为0时;反馈调节器:
比例积分、手动。
调整反馈调节器的手动输出,使第三水柱的液位稳定)。
⑶设置扰动量(干扰输入为幅值为10cm的阶跃信号。
)。
⑷整定静态前馈(调整前馈补偿器增益K,使第三水柱液位恢复,记录曲线)。
⑸改变K,观察、记录静态补偿第三水柱液位的控制过程(欠补偿;过补偿)。
2、动态前馈补偿:
⑴建立初稳态(沿袭静态前馈实验的初稳态、扰动量和静态前馈补偿增益K)。
⑵初定动态补偿(保持静态增益K;将3容液位对象的时间常数赋予超前时间T1;单容液位对象的时间常数赋予滞后时间T2),记录第三水柱液位的控制过程。
⑶改变动态参数,观察、记录第三水柱液位的控制过程(欠补偿;过补偿)。
3、静态前馈-反馈系统:
⑴建立初稳态(沿袭静态前馈实验的初稳态、扰动量和静态前馈补偿增益K)。
⑵观察、记录前馈-反馈控制系统第三水柱液位的控制过程(将实验四单回路控制系统的调节器参数赋予反馈调节器),记录静态前馈-反馈控制曲线。
4、动态前馈-反馈系统:
⑴建立初稳态(沿袭动态前馈实验的初稳态、扰动量和前馈补偿器参数)。
⑵观察、记录前馈-反馈控制系统第三水柱液位的控制过程(将实验四单回路控制系统的调节器参数赋予反馈调节器),记录动态前馈-反馈控制曲线。
实验数据:
1、绘制曲线:
⑴静态前馈完全补偿曲线6.1;
⑵静态前馈欠补偿曲线6.2;
⑶静态前馈过补偿曲线6.3;
⑷动态前馈完全补偿曲线6.4;
⑸动态前馈欠补偿曲线6.5;
⑹动态前馈过补偿曲线6.6;
⑺静态前馈-反馈控制曲线6.7;
⑻动态前馈-反馈控制曲线6.8。
2、记录参数:
认真记录对应上述各曲线的实验条件和调节器参数。
实验报告:
1、数据整理:
⑴将6.1、6.2和6.3作比较,总结静态前馈补偿器增益K对控制过程的影响规律。
⑵将曲线6.4、6.5和6.6作比较,总结动态前馈补偿器超前时间T1和滞后时间T2对控制过程的影响规律。
⑶将6.1与6.7作比较,说明单纯静态前馈和前馈-反馈系统控制过程动态品质指标。
⑷将6.4与6.8作比较,说明单纯动态前馈和前馈-反馈系统控制过程动态品质指标。
⑸将6.7和6.8与单回路控制曲线4.6比较,说明单纯反馈和前馈-反馈控制系统控制过程的动态品质指标。
2、思考题:
⑴对静态前馈补偿器和动态前馈补偿器的整定,哪个需要精细些?
哪个可以粗略点儿?
⑵说明超前-滞后环节参数与被控对象调节通道、扰动通道动态特性参数之间的关系。
⑶单纯前馈在实际应用中存在什么问题?
怎么解决?
⑷可以直接将前馈和反馈复合成前馈-反馈系统的依据是什么?
3、心得体会:
实验六大纯滞后控制系统
 升级会员
升级会员 