加盖拧盖单元实训指导书.docx
《加盖拧盖单元实训指导书.docx》由会员分享,可在线阅读,更多相关《加盖拧盖单元实训指导书.docx(17页珍藏版)》请在冰豆网上搜索。
加盖拧盖单元实训指导书
加盖拧盖单元实训指导书
一、工作任务
1、加盖拧盖单元安装与接线;
2、加盖拧盖单元的PLC程序设计;
3、加盖拧盖单元的调试与运行。
二、任务目标
加盖拧盖单元实现任务要求完成对物料瓶的加盖、拧盖工作,并输送到下一站。
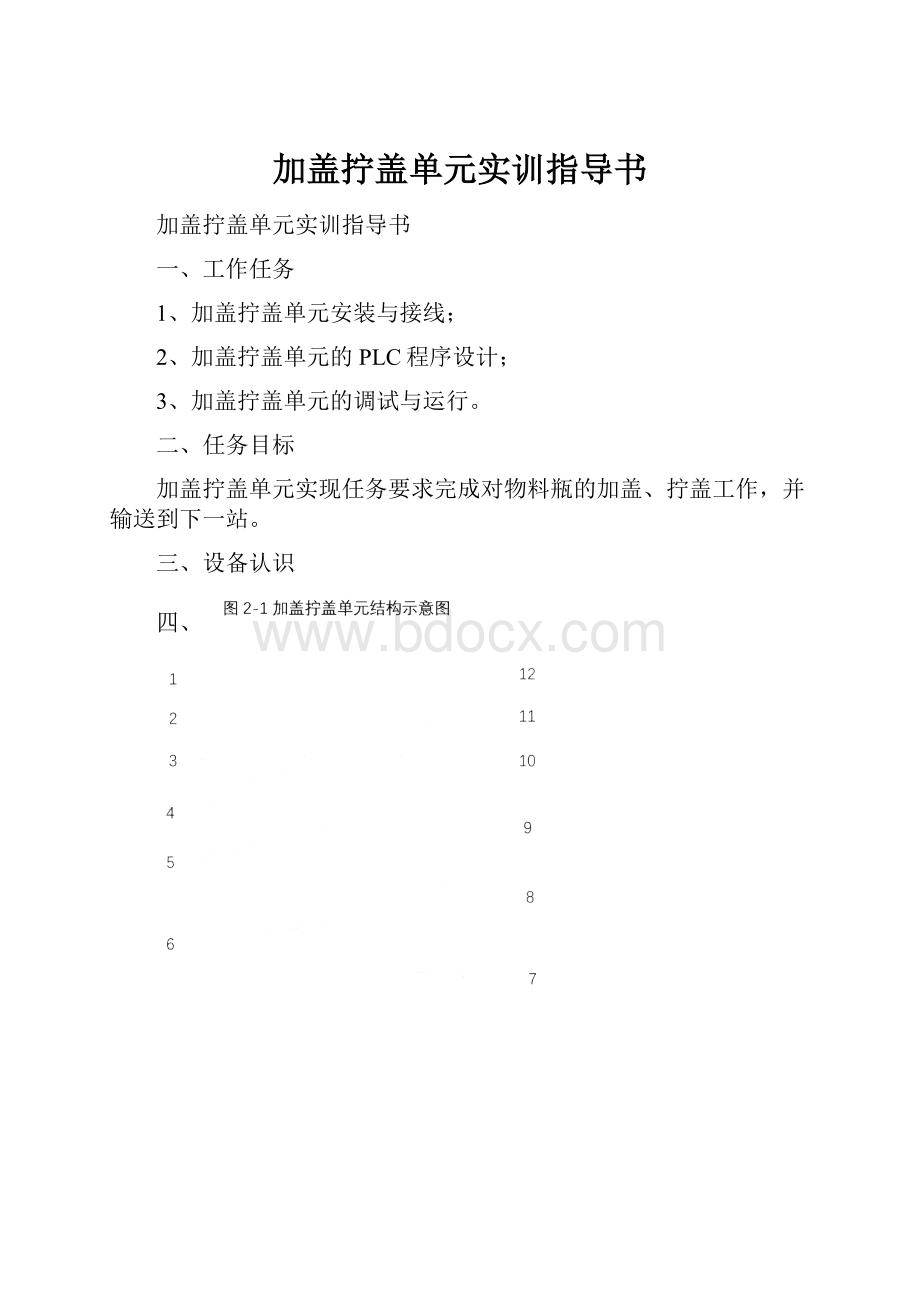
三、设备认识
四、
表2-1加盖拧盖单元部件明细表
1
瓶盖加料口
2
加盖机构
3
主皮带
4
加盖顶料气缸
5
传感器组
6
挂板接口板
7
PLC
8
按钮面板
9
台面接口板
10
拧盖顶料气缸
11
拧盖机构
12
拧盖电机
五、控制要求
1初始位置:
主皮带:
处于停止状态;
加盖推料气缸,加盖拧盖定位气缸,加盖拧盖气缸:
处于收回状态;
拧盖电机:
处于停止状态。
2、“单机”工作状态下按“启动”按钮,或者“联机”状态下,主站给出“启动”信号后,系统进入运行状态,“启动”指示灯亮,主皮带开始运行;加盖位检测到物料瓶时,延时0.5S,当物料瓶到达加盖位置,皮带停止,同时加盖定位气缸伸出,准确将物料瓶顶紧;瓶盖料筒检测到有盖信号,加盖伸缩气缸推出瓶盖,加盖升降气缸下降,同时加盖伸缩气缸缩回,将瓶盖加到物料瓶上后加盖升降气缸上升,加盖完成,加盖定位气缸退回,皮带运转;拧盖位检测到物料瓶时,延时0.5S,当物料瓶到达拧盖位位置,皮带停止,同时拧盖定位气缸推出,拧盖电机运转,拧盖升降气缸慢慢下降,拧盖电机对加盖后的物料瓶拧紧,完成后拧盖升降气缸上升,拧盖电机停止,拧盖定位气缸退回,皮带运转,送入下一单元,并如此循环下去。
3、在“单机”工作状态下按“停止”按钮,或者“联机”状态下主站给出“停止”信号,“停止”指示灯亮,皮带停止运行,定位气缸保持在当前位置,其他气缸回到初始状态。
4、在“单机”工作状态下按“复位”按钮,或者“联机”状态下主站给出“复位”信号,“复位”指示灯,定位气缸复位到初始状态。
再按下“启动”按钮,设备又能正常运行下去。
每次按下一个按钮,只有相应的指示灯亮。
六、能力目标
1、掌握加盖拧盖的安装与接线方法;
2、掌握加盖拧盖程序编写;
3、掌握加盖拧盖的系统设计与调试技术;
4、掌握气动元件的原理与应用;
5、掌握传感器的原理与应用;
6、掌握直流电机的应用。
七、任务准备
1、了解PLC结构原理并掌握其基本应用;
2、掌握PLC基本指令与功能指令的运用;
3、了解气动元件的应用;
本系统中应用到的气动元件有双轴气缸、笔形气缸、电磁阀、节流阀等。
1)双轴气缸、笔形气缸为执行元件,它的功能是将气体压力能转换成机械能并完成做功动作,其结构外形图2-2,在本系统中这两种型号的气缸主要用来对物料瓶的定位、瓶盖的推送等工作;
2)电磁阀为控制元件,是用电磁控制的工业元件,用在控制系统中调整气压的方向、流量和其他的参数,电磁阀要配合不同的电路来实现预期的控制。
其结构外形如图2-3,在本系统中电磁阀主要用来控制气流的流动方向,并与PLC、传感器等配合控制气缸的伸出和缩回;
3)节流阀为控制元件,它的工作原理是通过改变节流截面或节流长度以控制气体流量的阀门。
其结构外形如图2-4,它在本系统中主要的作用是控制每个气缸伸出、缩回的气体流量来调节气缸伸出和缩回的速度,本系统中所有气缸上的节流阀都需要调节,如果运动过快需要顺时针旋转节流阀调节旋钮,并锁紧防止松动;反之则需要逆时针旋转节流阀调节旋钮,直到达到合适的速度,再锁紧。
4)除了上面介绍的气动元件外还有汇流板,消声器、管道、接头等辅助元件,这些元件在气路中的作用为连接、消声等功能。
下面简单绘制出加盖拧盖单元气路原理图,如下图2-5。
表2-2加盖拧盖单元气路元件明细表
序号
型号
名称
序号
型号
名称
1
PB-10*80-S-U
笔形气缸
5
ASL4-M5
节流阀
2
TR10*60-S
双轴气缸
6
KQ2S04-M5
接头
3
TR10*20-S
双轴气缸
7
SS5Y3-20-05
汇流板
4
TR10*30-S
双轴气缸
8
SY3120-5LZD-M5
电磁阀
4、了解传感器原理及应用;
本单元用到了光纤传感器、磁性开关、光电开关三种类型传感器,它们的原理和应用有所不同。
详细请参照检测分拣单元传感器原理及应用部分。
5、了解直流电机的控制;
对直流电机上的铭牌指数进行识读,如额定电压、额定电流、额定转速等。
6、准确理解加盖拧盖单元控制要求;
7、材料准备;
表2-3领料单
领料单
项目名称
工作小组
领料人
领料日期
序号
名称
规格/型号
单位
申领数量
实发数量
备注
制单/领料:
审核:
批准:
发料员:
八、任务设计与实施
1、制原理图
根据任务要求,设计如图2-6所示的控制原理图。
图2-6
2、I/O控制原理图,如图2–7所示:
3、I/O控制原理图完成加盖拧盖单元的安装与接线。
4、PLC程序设计与编写
1)PLC主程序
(1)主程序流程图,如图2-8所示:
(2)根据主程序流程图,编写PLC主程序如下:
2)复位子程序
(1)复位子程序流程图,如图2-9所示
(2)根据复位子程序流程图,编写PLC子程序如下。
3)自动运行程序
(1)自动运行程序流程图,如图2-9所示:
(2)根据自动运行程序流程图,编写PLC程序如下:
`
4)停止子程序P2如下:
5)联机手动子程序P3如下:
九、结束语
该系统主要是PLC和传感器对气动执行元件的控制,系统具有自动加盖拧盖功能和数据传送功能。
在实训过程对电气I/O控制原理图的理解后正确接线,根据传感器的功能要求调整合适位置;在实训过程对气路原理图的理解后正确接气管,并根据气缸动作快慢要求调节节流阀至合适速度;在实训过程能掌握对PLC的编程、气动执行元件的应用工作原理、传感器的应用,对存在的问题进行逐一清查,能具备分析解决问题的能力;在系统实训中举一反三,思索在正常情况之外的控制方式。
此实训内容仅作入门和参考,学员可随着学习的深入进行拓展延伸,发掘更多的知识点,理解更广的应用范围,对于一体化运动控制能有着严密的逻辑构想。
 升级会员
升级会员 