中考物理试题分类汇编简单机械图像分析专题word版包含答案.docx
《中考物理试题分类汇编简单机械图像分析专题word版包含答案.docx》由会员分享,可在线阅读,更多相关《中考物理试题分类汇编简单机械图像分析专题word版包含答案.docx(11页珍藏版)》请在冰豆网上搜索。
中考物理试题分类汇编简单机械图像分析专题word版包含答案
2019年中考物理试题分类汇编——简单机械图像分析专题
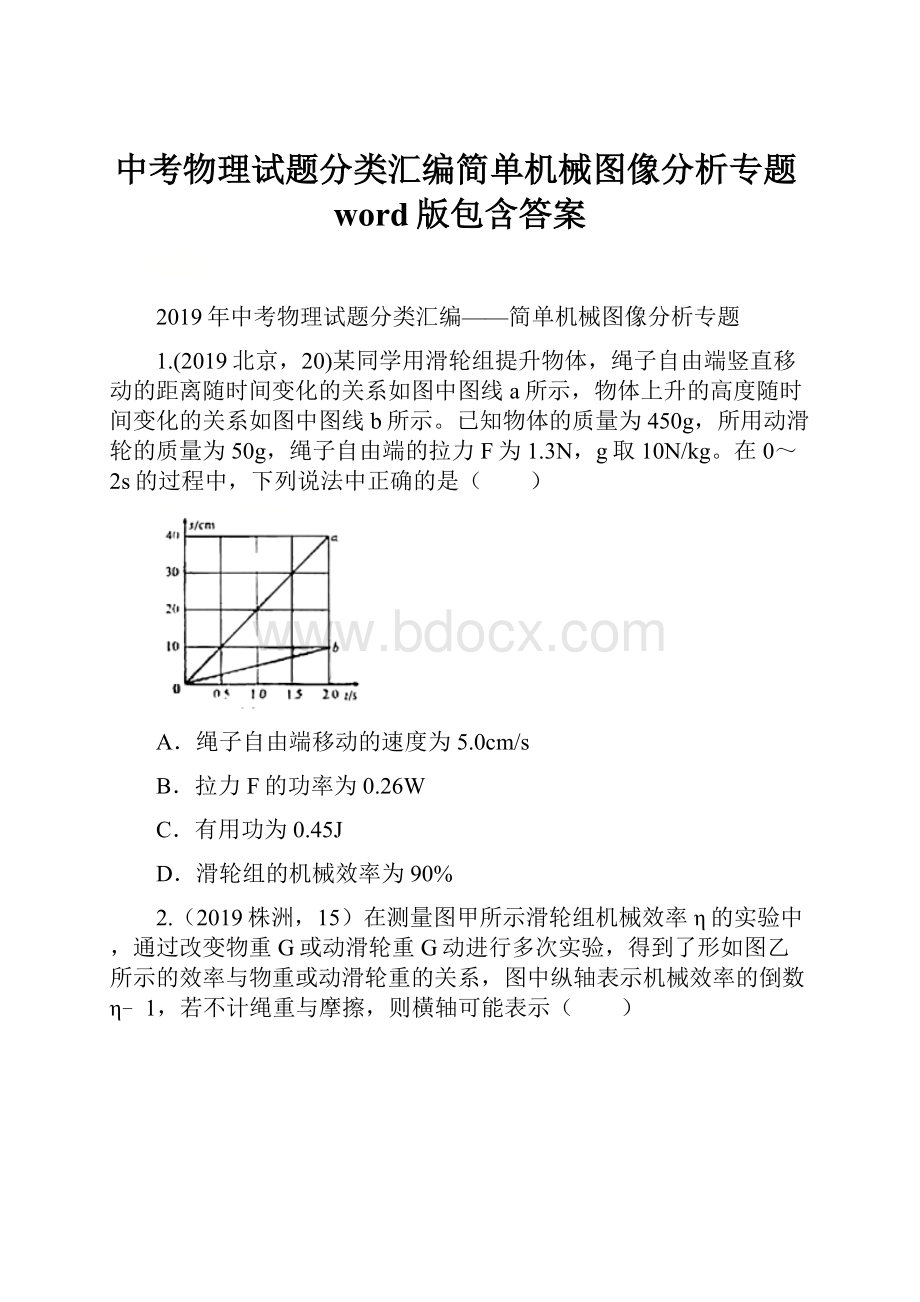
1.(2019北京,20)某同学用滑轮组提升物体,绳子自由端竖直移动的距离随时间变化的关系如图中图线a所示,物体上升的高度随时间变化的关系如图中图线b所示。
已知物体的质量为450g,所用动滑轮的质量为50g,绳子自由端的拉力F为1.3N,g取10N/kg。
在0~2s的过程中,下列说法中正确的是( )
A.绳子自由端移动的速度为5.0cm/s
B.拉力F的功率为0.26W
C.有用功为0.45J
D.滑轮组的机械效率为90%
2.(2019株洲,15)在测量图甲所示滑轮组机械效率η的实验中,通过改变物重G或动滑轮重G动进行多次实验,得到了形如图乙所示的效率与物重或动滑轮重的关系,图中纵轴表示机械效率的倒数η﹣1,若不计绳重与摩擦,则橫轴可能表示( )
A.GB.G﹣1C.G动D.
3.(2019大庆,9)汽车在平直公路上以速度V0匀速行驶,发动机功率为P0,牵引力为F0,t1时刻开始,司机减小了油门,使汽车保持恒定功率P行驶,到t2时刻,汽车又开始做匀速直线运动,速度为v,已知运动过程中汽车所受阻力f恒定不变,汽车牵引力F随时间变化的图象如图所示,则( )
A.t1至t2时间内,汽车做加速运动
B.F0=2f
C.t2时刻之后,汽车将保持功率P0行驶
D.v=
v0
4.(2019长沙,17)在科技节,小海用传感器设计了如图甲所示的力学装置,杠杆OAB始终在水平位置保持平衡,O为杠杆的支点,OB=3OA,竖直细杆a的上端通过力传感器连在天花板上,下端连在杠杆的A点,竖直细杆b的两端分别与杠杆和物体M固定,水箱的质量为0.8kg,不计杠杆、细杆及连接处的重力。
当图甲所示的水箱中装满水时,水的质量为3kg。
力传感器可以显示出细杆a的上端受到作用力的大小,图乙是力传感器的示数大小随水箱中水的质量变化的图象,(取g=10N/kg)
(1)图甲所示的水箱装满水时,水受到的重力为 N;
(2)物体M的质量为 kg;
(3)当向水箱中加入质量为1.1kg的水时,力传感器的示数大小为F,水箱对水平面的压强为p1;继续向水箱中加水,当力传感器的示数大小变为4F时,水箱对水平面的压强为p2,则p1:
p2= 。
5.(2019赤峰,22)一木块重480N体积为0.08m3,用力F将木块沿斜面匀速拉到高处,如图甲所示。
已知拉力F做的功W与木块沿斜面运动距离s的关系如图乙所示。
整个过程的额外功是320J.(g=10N/kg)
求:
(1)木块的密度;
(2)拉力F大小;
(3)斜面的机械效率。
6.(2019玉林,)某物理研究小组设计了一个压力报警装置,工作原理如图13甲所示。
OBA为水平杠杆、OA长100cm,O为支点,OB:
BA=1;4;已知报警器R0的阻值恒为10Ω,压力传感器R固定放置,压力传感器受到的压力F与R的阻值变化的关系如图.13乙所示。
当托盘空载时,闭合开关S,电压表的示数为1V;当托盘所受的压力增大,电压表的示数达到2V时,报警器R0开始发出报警信号。
托盘、压杆和杠杆的质量均忽略不计,电压表的量程为0~3V。
求:
(1)电源电压;
(2)当报警器开始报警时,压力传感器受到的压力;
(3)当托盘受到的压力为120N时,报警器是否报警:
(4)当电路输出的电功率与电路在安全状态下输出的最大电功率的比值为5:
6时,托盘受到的压力。
7.(2019广安,28)如图所示,图甲是使用滑轮组从水中打捞一正方体物体的简化示意图,在打捞过程中物体始终以0.1m/s的速度匀速竖直上升,物体未露出水面前滑轮组的机械效率为75%,图乙是打捞过程中拉力F随时间t变化的图象。
(不计绳重,忽略摩擦和水的阻力,g取10Nkg)求:
(1)物体的边长;
(2)物体浸没在水中时受到的浮力;
(3)物体的重力。
2019年中考物理试题分类汇编——简单机械图像分析专题答案
1.(2019北京,20)某同学用滑轮组提升物体,绳子自由端竖直移动的距离随时间变化的关系如图中图线a所示,物体上升的高度随时间变化的关系如图中图线b所示。
已知物体的质量为450g,所用动滑轮的质量为50g,绳子自由端的拉力F为1.3N,g取10N/kg。
在0~2s的过程中,下列说法中正确的是( )
A.绳子自由端移动的速度为5.0cm/s
B.拉力F的功率为0.26W
C.有用功为0.45J
D.滑轮组的机械效率为90%
【答案】BC。
2.(2019株洲,15)在测量图甲所示滑轮组机械效率η的实验中,通过改变物重G或动滑轮重G动进行多次实验,得到了形如图乙所示的效率与物重或动滑轮重的关系,图中纵轴表示机械效率的倒数η﹣1,若不计绳重与摩擦,则橫轴可能表示( )
A.GB.G﹣1C.G动D.
【答案】BC。
3.(2019大庆,9)汽车在平直公路上以速度V0匀速行驶,发动机功率为P0,牵引力为F0,t1时刻开始,司机减小了油门,使汽车保持恒定功率P行驶,到t2时刻,汽车又开始做匀速直线运动,速度为v,已知运动过程中汽车所受阻力f恒定不变,汽车牵引力F随时间变化的图象如图所示,则( )
A.t1至t2时间内,汽车做加速运动
B.F0=2f
C.t2时刻之后,汽车将保持功率P0行驶
D.v=
v0
【答案】D
4.(2019长沙,17)在科技节,小海用传感器设计了如图甲所示的力学装置,杠杆OAB始终在水平位置保持平衡,O为杠杆的支点,OB=3OA,竖直细杆a的上端通过力传感器连在天花板上,下端连在杠杆的A点,竖直细杆b的两端分别与杠杆和物体M固定,水箱的质量为0.8kg,不计杠杆、细杆及连接处的重力。
当图甲所示的水箱中装满水时,水的质量为3kg。
力传感器可以显示出细杆a的上端受到作用力的大小,图乙是力传感器的示数大小随水箱中水的质量变化的图象,(取g=10N/kg)
(1)图甲所示的水箱装满水时,水受到的重力为 N;
(2)物体M的质量为 kg;
(3)当向水箱中加入质量为1.1kg的水时,力传感器的示数大小为F,水箱对水平面的压强为p1;继续向水箱中加水,当力传感器的示数大小变为4F时,水箱对水平面的压强为p2,则p1:
p2= 。
【答案】
(1)30;
(2)0.2;(3)2:
3。
5.(2019赤峰,22)一木块重480N体积为0.08m3,用力F将木块沿斜面匀速拉到高处,如图甲所示。
已知拉力F做的功W与木块沿斜面运动距离s的关系如图乙所示。
整个过程的额外功是320J.(g=10N/kg)
求:
(1)木块的密度;
(2)拉力F大小;
(3)斜面的机械效率。
解:
(1)木块的质量:
m=
=
=48kg
木块的密度:
ρ=
=
=0.6×103kg/m3
(2)由图象知,拉力做总功800J,木块移动的距离是4m,
W=Fs得,拉力为:
F=
=
=200N
(3)木块上升过程中有用功为:
W有=W﹣W额=800J﹣320J=480J
斜面的机械效率:
η=
×100%=
×100%=60%
答:
(1)木块的密度是0.6×103kg/m3;
(2)拉力F大小是200N;
(3)斜面的机械效率是60%。
6.(2019玉林,)某物理研究小组设计了一个压力报警装置,工作原理如图13甲所示。
OBA为水平杠杆、OA长100cm,O为支点,OB:
BA=1;4;已知报警器R0的阻值恒为10Ω,压力传感器R固定放置,压力传感器受到的压力F与R的阻值变化的关系如图.13乙所示。
当托盘空载时,闭合开关S,电压表的示数为1V;当托盘所受的压力增大,电压表的示数达到2V时,报警器R0开始发出报警信号。
托盘、压杆和杠杆的质量均忽略不计,电压表的量程为0~3V。
求:
(1)电源电压;
(2)当报警器开始报警时,压力传感器受到的压力;
(3)当托盘受到的压力为120N时,报警器是否报警:
(4)当电路输出的电功率与电路在安全状态下输出的最大电功率的比值为5:
6时,托盘受到的压力。
解:
(1)当托盘空载时,此时电路中的电流,
由图乙可知托盘空载时,压力传感器R=30Ω
电源电压U=I1(R0+R)=0.1A×(10Ω+30Ω)=4V
(2)当报警器开始报警时,此时电路中的电流
压力传感器的电阻
由图乙可知当压力传感器为10Ω时,压力传感器受到的压力F=20N
(3)根据杠杆平衡条件F1l1=F2l2,可知F托盘×OB=F×OA,
由OB:
BA=1:
4,可得OB:
OA=1:
5,
压力传感器受到的压力F’=F’托盘×
=120N×
=24N
由于报警器报警时F=20N,而F’>F,因此报警器报警。
(4)要保证电路安全,
,P最大=UI最大=4V×0.3A=1.2W
由P’’:
P最大=5:
6可得P’’=P最大×
=1.2W×
=1W
此时电路输出的电功率P’’=
,则
由图乙可知当压力传感器R’’=6Ω时,压力传感器受到的压力F’’=30N
由杠杆平衡条件可得,托盘受到的压力F’’托盘=F’’×
=30N×
=150N
7.(2019广安,28)如图所示,图甲是使用滑轮组从水中打捞一正方体物体的简化示意图,在打捞过程中物体始终以0.1m/s的速度匀速竖直上升,物体未露出水面前滑轮组的机械效率为75%,图乙是打捞过程中拉力F随时间t变化的图象。
(不计绳重,忽略摩擦和水的阻力,g取10Nkg)求:
(1)物体的边长;
(2)物体浸没在水中时受到的浮力;
(3)物体的重力。
解:
(1)由图象可知正方体的边长:
L=vt=0.1m/s×(110s﹣100s)=1m;
(2)物体浸没在水中时受到的浮力为:
F浮=ρ水gV排=ρ水gV=1.0×103kg/m3×10N/m×(1m)3=104N;
(3)滑轮组的机械效率:
=
代入数据得:
解得:
G=105N。
答:
(1)正方形边长L=1m;
(2)F浮=104N;(3)G=105N。
 升级会员
升级会员 