循迹避障寻光自动小车.docx
《循迹避障寻光自动小车.docx》由会员分享,可在线阅读,更多相关《循迹避障寻光自动小车.docx(8页珍藏版)》请在冰豆网上搜索。
循迹避障寻光自动小车
循迹避障寻光电动小汽车
摘要:
采用美国ATMEL公司资源丰富的ATmegal128产品作为主控芯片进行设计
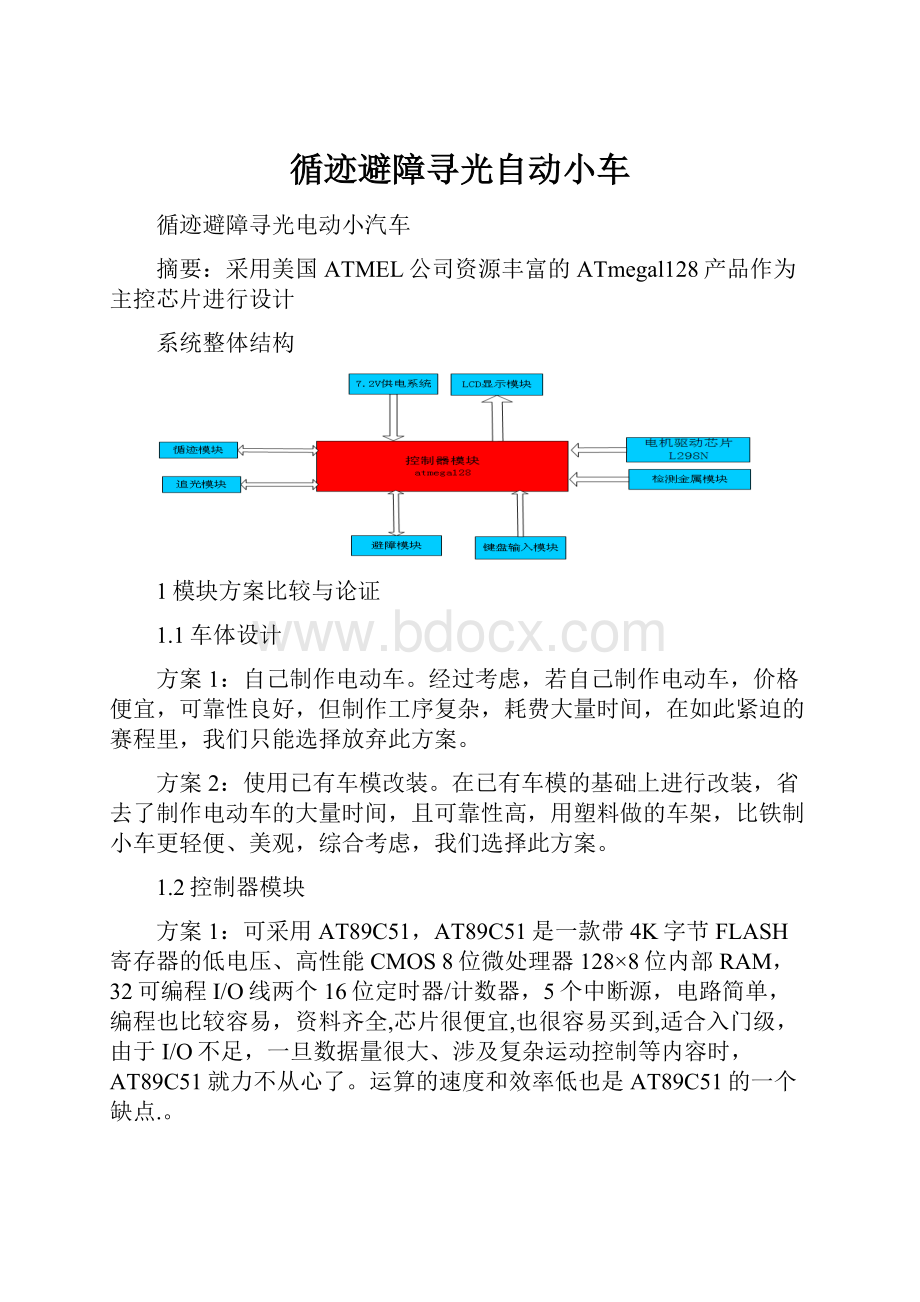
系统整体结构
1模块方案比较与论证
1.1车体设计
方案1:
自己制作电动车。
经过考虑,若自己制作电动车,价格便宜,可靠性良好,但制作工序复杂,耗费大量时间,在如此紧迫的赛程里,我们只能选择放弃此方案。
方案2:
使用已有车模改装。
在已有车模的基础上进行改装,省去了制作电动车的大量时间,且可靠性高,用塑料做的车架,比铁制小车更轻便、美观,综合考虑,我们选择此方案。
1.2控制器模块
方案1:
可采用AT89C51,AT89C51是一款带4K字节FLASH寄存器的低电压、高性能CMOS8位微处理器128×8位内部RAM,32可编程I/O线两个16位定时器/计数器,5个中断源,电路简单,编程也比较容易,资料齐全,芯片很便宜,也很容易买到,适合入门级,由于I/O不足,一旦数据量很大、涉及复杂运动控制等内容时,AT89C51就力不从心了。
运算的速度和效率低也是AT89C51的一个缺点.。
方案2:
采用美国ATMEL公司资源丰富的ATmegal128产品作为主控芯片进行设计。
ATmegal128为基于AVRRISC结构的8位低功耗CMOS微处理器,具有快速、灵活、集成度高、加密性强和易实现等诸多优点。
ATmegal128具有128KB的系统内可编程FLASH、4KB的SRAM、35个中断、53个通用I/O口线、32个通用寄存器、实时时钟RTC、4个灵活的具有比较模式和PWM功能的定时器/计数器(T/C)、2个USART、面向字节的两线接口TW1、8通道10位ADC、具有片内振荡器的可编程看门狗定时器、SPI串行端口、与IEEE1149.1规范兼容的JTAG测试接口,以及6种可以通过软件选择的省电模式。
总的来说,CPU构架不同,虽然都是8位的,但指令集不同,ATmega128是用RISC的,哈佛结构的总线;AT89C51是用CISC,冯诺衣曼结构的总线。
跟ATmega128比,AT89C51是老掉牙的东西,内部资源少,速度慢,但学习简单,经过仔细比较,我们选择方案2。
1.3避障模块
方案1:
用超声波传感器进行避障。
超声波传感器在避障系统中普遍使用,其避障性能很好,接收与发射信号不易受外界干扰,可以很好的实现避障的功能,但是,超声波传感器信号CHULI复杂,技术难度较高,综合考虑后,放弃此方案。
方案2:
用红外接收头和红外二极管进行蔽障,红外接收头接受已调制的信号,因此受其它光源的影响较小,能实现避障的功能。
造价低,体积小,便于装在小车上。
综合考虑我选择此方案。
1.4电机的选择
方案1:
采用步进电机作为该系统的驱动电机。
步进电机体积大价格高昂,且它的输出力矩较低,随转速的升高而下降,且在较高转速时会急剧下降,其转速较低,不适合于小车等有一定速度要求的系统。
综合考虑比较,我们放弃了此方案。
方案2:
采用直流电机。
直流电机转动力矩大,体积小,重量轻,电路简单,使用方便。
由于其内部由高速电动机提供原始动力,可以产生大力矩。
能够较好的满足系统要求,方向可用于控制前轮转动角度,可实现避障、循迹和寻光功能。
因此我们选择此方案。
1.5电机驱动电路
方案1:
采用直流电机驱动芯片MC338886,驱动电流可达2A,外围器件简单,贴片封装体积小,但调速时MC338886发热量很大,导致MC338886的FS引脚置位,从而使其不工作,特别是采用反向制动后置这这只这种情况更严重。
方案2:
采用直流电机驱动芯片L298N,驱动电流总和可达到4A,它可以驱动二相和四相步进电机的专用芯片,我们利用它内部的双H(如图1)桥式电路来驱动直流电机,这种驱动电路可以很方便实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动。
控制比较简单,电路也很简单。
因此我们选择此方案。
1.6显示模块
方案1:
采用LED显示器,它采用低电压扫描驱动,亮度高、刷新速率快,但是功耗高、显示字符不美观。
综合考虑后,放弃此方案。
方案2:
采用LCD显示器,LCD的优点主要包括零辐射、低功耗、散热小、体积小、图像再现精确、字符显示美观等,便于安装。
而且现在LCD技术很成熟,在显示器的市场比LED占的比重要大,因此我们选择此方案。
1.7循迹模块
方案1:
采用发光二极管发光,用光敏二极管接受。
当发光二极管发出的可见光照射到黑线时,光线被黑线吸收。
光敏二极管检测到信号,呈高阻抗,使输出端为低电平。
当发光二极管发出的可见光照射到地面时,它发出的可见光反射回来被光敏二极管检测到,其阻抗迅速降低,此时输出端为高电平。
但是由于二极管受环境中的可见光影响较大,且电路的稳定性差。
方案2:
使用红外对管,特点是价格低、体积小、质量轻、对小车的转向不会造成影响,其抗光干扰能力强,灵敏度高响应快,光电转换速度快,
1.8寻光模块
方案1:
使用光敏电阻检测光源时,其光照特性为非线性、反应灵敏度一般,检测距离范围有限,其受外部影响较大,检测信号易出现误差,故放弃使用此方案。
方案2:
使用光电三极管自制追光传感器。
光电三极管灵敏度高,线性好,能将光信号转变成电信号,便于判断。
其温度变化对光电流影响较小,且便于安装在小车上,此方案价格低廉,可靠性良好,能满足此系统的要求,所以我们选择此方案。
1.9检测金属模块
方案1:
使用接近开关:
它即有行程开关、微动开关的特性,同时具有传感性能,其动作可靠,性能稳定,频率响应快,应用寿命长,抗干扰能力强等、并具有防水、防震、耐腐蚀等特点。
当金属检测体接近开关的感应区域,开关就能无接触,无压力、无火花、迅速发出电气指令,准确反应出运动机构的位置和行程,即使用于一般的行程控制,其定位精度、操作频率、使用寿命、安装调整的方便性和对恶劣环境的适用能力,是一般机械式行程开关所不能相比的。
触点开关:
是传统的按钮开关,通过接触触点来控制开关的通断。
电路抗静电能力较弱,很容易静电损坏。
不适用在高温,防潮,耐腐蚀的地方。
1.10电源模块
方案1采用若几节干电池串联供电。
干电池有较强的电机驱动能力以及稳定的电压输出性能。
但是,携带电池盒会影响整体布局,在小型电动车上使用不方便,且不能很好的利用太阳能充电系统。
因此我们放弃了此种方案。
方案2:
采用7.2V蓄电池为系统供电。
7.2V电压蓄电池经过LM7805、LM7806稳压后,可为电机的驱动和单片机系统的工作提供稳定的电压,且携带方便,便于调整布局,综合考虑,选用了此方案。
1.11PWM调速的优点
PWM调速主要是针对功率较小的低惯量电机,具有高的定位速度和精度,低速性能好,稳速精度高,调速范围宽,系统频带宽,动态响应好,抗干扰能力强,且经济可靠,因而有很大的使用价值。
调压调速主要是针对饶线式电机,通过串电阻调压调速。
价格便宜。
在一些精度要求不高,低电压时力矩小,调速范围小的场合。
足已。
 升级会员
升级会员 