手机倾斜角传感器论.docx
《手机倾斜角传感器论.docx》由会员分享,可在线阅读,更多相关《手机倾斜角传感器论.docx(25页珍藏版)》请在冰豆网上搜索。
手机倾斜角传感器论
倾斜角传感器在汽车上的应用
一、倾斜角传感器的定义-2-
二、倾角传感器简介-2-
三、倾斜角传感器的应用-5-
四、倾角传感器发展趋势与产品现状-8-
五、介绍三种常见的知名厂商的传感器-8-
六、倾斜角传感器设计实例-12-
倾斜角传感器
一、倾斜角传感器的定义
倾角传感器可以用来测量相对于水平面的倾角变化量。
理论基础就是牛顿第二定律,根据基本的物理原理,在一个系统内部,速度是无法测量的,但却可以测量其加速度。
如果初速度已知,就可以通过积分计算出线速度,进而可以计算出直线位移。
所以它其实是运用惯性原理的一种加速度传感器。
二、倾角传感器简介
倾角传感器经常用于系统的水平距离和物体的高度的测量,从工作原理上可分为固体摆式、液体摆式、气体摆式三种倾角传感器,这三种倾角传感器都是利用地球万有引力的作用,将传感器敏感器件对大地的姿态角,即与大地引力的夹角(倾角)这一物理量,转换成模拟信号或脉冲信号,他们的原理分别介绍如下:
1.固体摆式倾角传感器
固体摆在设计中广泛采用力平衡式伺服系统,如图1所示,其由摆锤、摆线、支架组成,摆锤受重力G和摆拉力T的作用,其合外力F为:
(1)
式中的θ为摆线与垂直方向的夹角。
在小角度范围内测量时,可以认为F与θ成线性关系。
如应变式倾角传感器就是基于此原理。
2.液体摆式倾角传感器
液体摆的结构原理是在玻璃壳体内装有导电液,并有三根铂电极和外部相连接,三根电极相互平行且间距相等,如图2所示。
当壳体水平时,电极插入导电液的深度相同。
如果在两根电极之间加上幅值相等的交流电压时,电极之间会形成离子电流,两根电极之间的液体相当于两个电阻RI3所示,左边电极浸入深度小,则导电液减少,导电的离子数减少,电阻RI减少,即RI>RIII。
反之,若倾斜方向相反,则RI<RIII。
增大,相对极则导电液增加,导电的离子数增加,而使电阻RIII和RIII。
若液体摆水平时,则RI=RIII。
当玻璃壳体倾斜时,电极间的导电液不相等,三根电极浸入液体的深度也发生变化,但中间电极浸入深度基本保持不变。
在液体摆的应用中也有根据液体位置变化引起应变片的变化,从而引起输出电信号变化而感知倾角的变化。
在实用中除此类型外,还有在电解质溶液中留下一气泡,当装置倾斜时气泡会运动使电容发生变化而感应出倾角的“液体摆”。
3.气体摆式倾角传感器
气体在受热时受到浮升力的作用,如同固体摆和液体摆也具有的敏感质量一样,热气流总是力图保持在铅垂方向上,因此也具有摆的特性。
“气体摆”式惯性元件由密闭腔体、气体和热线组成。
当腔体所在平面相对水平面倾斜或腔体受到加速度的作用时,热线的阻值发生变化,并且热线阻值的变化是角度q或加速度的函数,因而也具有摆的效应。
其中热线阻值的变化是气体与热线之间的能量交换引起的。
“气体摆”式惯性器件的敏感机理基于密闭腔体中的能量传递,在密闭腔体中有气体和热线,热线是唯一的热源。
当装置通电时,对气体加热。
在热线能量交换中对流是主要形式。
对流传热的方程为:
(2)
其中:
h—热量传递系数(
),s—热线表面积(m2),
TH—热线温度(K),TA—气体温度(K)。
热量传递系数h与流体的热传导率、动力学粘度、流体速度和热线直径有关,表示为:
,
,
(3)
其中:
Nu—为努塞尔(Nusselt)数,
—热传导率(W/mK),Re—雷诺(Reynold),
U—流体速度(m2/s),D—热线的直径(m),n—流体的动力学粘度。
当气体以流体速度U垂直穿过热线时,
(4)
将(4)式带入(3)式式得:
(5)
根据热平衡方程得:
所以,
(6)
假设
和s为常数,则有:
(7)
从式(7)可以看出,当流体的动力学粘度、密度和热传导特性一定时,若热线周围流体的速度不同,则流过热线的电流也不同,从而引起热线两端的电压也产生相应的变化。
气体摆式惯性器件就是根据这一原理研制的。
气体摆式检测器件的核心敏感元件为热线。
电流流过热线,热线产生热量,使热线保持一定的温度。
热线的温度高于它周围气体的温度,动能增加,所以气体向上流动。
在平衡状态时如图4(a)所示,热线处于同一水平面上,上升气流穿过它们的速度相同,即V7)可知,流过热线的电流也相同,电桥平衡。
当密闭腔体倾斜时,热线相对水平面的高度发生了变化,如图4(b)所示,因为密闭腔体中气体的流动是连续的,所以热气流在向上运动的过程中,依次经过下部和上部的热线。
若忽略气体上升过程中克服重力的能量损失,则穿过上部热线的气流已经与下部热线的产生热交换,使穿过两根热线时的气流速度不同,这时V>V2,因此流过两根热线的电流也会发生相应的变化,所以电桥失去平衡,输出一个电信号。
倾斜角度不同,输出的电信号也不同。
4.固、液、气体摆性能比较
就基于固体摆、液体摆及气体摆原理研制的倾角传感器而言,它们各有所长。
在重力场中,固体摆的敏感质量是摆锤质量,液体摆的敏感质量是电解液,而气体摆的敏感质量是气体。
气体是密封腔体内的唯一运动体,它的质量较小,在大冲击或高过载时产生的惯性力也很小,所以具有较强的抗振动或冲击能力。
但气体运动控制较为复杂,影响其运动的因素较多,其精度无法达到军用武器系统的要求。
固体摆倾角传感器有明确的摆长和摆心,其机理基本上与加速度传感器相同。
在实用中产品类型较多如电磁摆式,其产品测量范围、精度及抗过载能力较高,在武器系统中应用也较为广泛。
液体摆倾角传感器介于两者之间,但系统稳定,在高精度系统中,应用较为广泛,且国内外产品多为此类。
三、倾斜角传感器的应用
●高层建筑安全监测
目前世界上摩天大楼越来越多,为了监测大楼的安全性能,可以应用SSA03系列高精度倾角传感器,该系列倾角传感器可以感应微小角度的变化,
可以用于大楼摆幅、震动、倾斜等监测。
●汽车四轮定位
随着电子技术的发展和应用,汽车的安全性、舒适性和智能性越来越高。
汽车侧向倾斜角度传感器的应用是防止汽车在行驶中发生倾翻事过的一种有效方法。
是提高汽车安全性的重要措施,特别是越野车。
双层客车等重心较高的
汽车更有必要性。
汽车倾翻的实质是:
行驶中向外的倾翻力矩大于向里的稳定力矩,当重心高度一定时,倾斜力矩油倾翻力(向外的侧向力)决定。
●轨检仪
目前的轨道测量方式智能程度差,测量精度低,操作时间长,迫切需要设计一种适用于一般工务段使用的便携式智能化轨道检测仪倾角传感器用于轨检仪,用于实时检测铁道的倾斜度和高度差
●输电线铁塔倾斜智能监测
输电线铁塔的倒塌事件时有发生,一旦发生倒塌,将会造成巨大的损失,倾角传感器应用于输电线铁塔倾斜角度监测,可以实时监测输电线倾斜角度,一旦因为大风等自然灾害导致倾斜角度过大,实时发出预警信号,由工作人员维修减少损失。
●大坝安全监测
大坝垮塌事故已经发生过,为了及时发出预警信号,减少财产损失,通过倾角传感器的监测、观测仪器和设备,以及时取得反映大坝和基岩性态变化以及环境对大坝作用的各种数据的观测和资料处理等工作。
其目的是分析估计大坝的安全程度,以便及时采取措施,设法保
证大坝安全运行
●倾角传感器其他应用
◆地理:
山体滑坡,雪崩
◆民用:
大坝,建筑,桥梁,玩具,报警,运输
◆工业:
吊车,吊架,收割机,起重机,称重系统的倾斜补偿,沥青
机.铺路机、摊铺机等
◆火车:
高速列车转向架和客车车厢的倾斜测量
◆海事:
纵倾和横滚控制,油轮控制,天线位置控制、帆船姿态校准
◆钻井:
精确钻井倾斜控制
◆机械:
倾斜控制,大型机械对准控制,弯曲控制,起重机
◆高校:
机器人姿态控制,各种科研项目
◆竞赛:
机器人竞赛、电子设计竞赛、挑战杯竞赛等各种竞赛
◆典型应用:
汽车四轮定位仪、铁道轨距尺、水库大坝安全监测用倾斜
仪、机器人控制。
四、倾角传感器发展趋势与产品现状
目前生产倾角传感器的厂商较少,但就产品而言,单轴倾角传感器居多,且分辨率较高。
就国内产品而言,传感器与电路集成较少,且大多只提供模拟量输出。
就传感器发展状况而言,从收集资料看,北京信息工程学院的产品在小型化及产品精度等指标方面较领先,如膜电位倾角传感器。
就网络查询反馈看,产品主要集中在欧美几家大公司,在国内普遍应用较广的有如芬兰的VTI公司、德国的西门子公司、英国Clino公司、美国的CrossBowTechnology公司、Atmos工程公司、Fredericks公司以及美国数字公司。
就国外产品种类而言,其数量也较少,但从数字化、小型化、精度、重量、使用温度范围及线性度等指标而言,具有较高的实用价值。
如LS系列产品分辨率可达到1.8,英国Clino公司SP系列产品高度只有22rnm,特殊的可达到16mm,可用于一些特殊场合。
CrossBow公司CXTA、美国数子公司A2产品均属于数字产品,可以通过接口板直接与计算机相连。
同时在查阅的过程中可以看出,加速度传感器由于其动态性能好,精度高,因此在倾角测量中也得到广泛的应用。
五、介绍三种常见的知名厂商的传感器
MEMS高精度单轴倾角传感器SCA103T-D05
产品介绍:
高精度单轴倾角传感器SCA103T-D05是基于3DMEMS的高精度单轴倾角传感器,它提供了水平测量仪表级别的性能。
传感器的传感元件在测量时需要与测量平台保持平行,并且传感器双轴需相互垂直。
低温度依赖性、高分辨率、低噪声和健全的传感元件设计让SCA103T-D05倾角传感器成为水平测量仪器的不二选择。
VTI的倾角传感器对于振动不灵敏,因为他们都在传感元件内部增加了阻尼,并且能承受高达20,000g的机械冲击力。
详细参数:
型号:
SCA103T-D05
轴数:
1轴
带宽:
8~28Hz
灵敏度:
8V/g,3277LSB/g
温漂:
±0.002°/℃
量程:
±0.5g
输出方式:
SPI,模拟
供电电源:
4.75V~5.25V
功耗:
5mAmax
MEMS高精度单轴倾角传感器SCA103T-D05优势特点:
最高精度的MEMS单轴倾角传感器
全温区、长期保持高稳定性
Ug级别的分辨率
可靠
能遭受超过20,000g的冲击
传感器元件做了机械阻尼设计,可忽略掉振动的影响。
多种方式的自我诊断设计,方便工程调试设计
非常容易使用
使用标准的双排针塑料表贴封装。
不需要编程,不需要进行再校正。
内部增加温度补偿传感器。
仅需一个5V直流供电。
同时具有模拟和数字输出(SPI)接口。
MEMS高精度单轴倾角传感器SCA103T-D05应用范围:
平台水准测量与稳定
水准仪器
旋转激光仪
施工水准设备
BOSCH数字式三轴加速度传感器BMA250
产品介绍:
BoschSensortec的BMA250是为电子消费市场设计的一款数字输出的低功耗三轴加速度传感器,BMA250加速度传感器2mmX2mm的小型封装和数字接口使其满足众多消费电子制造商的需求,尤其是在便携式手持设备上。
BMA250加速度传感器具有从±2g到±16g四个可编程的测量范围,提供应用程序设计者更多的开发弹性,较高的测量精度,其十位的数据可提供最高精确度小于4mg
详细参数:
型号:
BMA250
轴数:
三轴
带宽:
8Hz~1000Hz
灵敏度:
32LBS/g~256LBS/g
温漂:
±0.5
量程:
±2g~±16g
输出方式:
SPI,I2C
供电电源:
1.2V~3.6V
功耗:
<139uA
三轴加速度传感器BMA250优势特点:
2mmX2mmX0.95mm的小尺寸
四个可选量程±2g,±4g,±8g,±16g
低功耗139uA
1.2V~3.6v供电电压
数字I2C和SPI接口
R0HS保护
三轴加速度传感器BMA250产品应用
计算机外设
自由落体检测
运动控制检测
游戏输入设备
手机
电子罗盘
VTI三轴加速度传感器SCA3000-D1
产品介绍
VTISCA3000-D1是基于VTI的3D-MEMS电容传感器技术的高精度三轴数字加速度传感器。
SCA3000-D1由三个高精度微电机加速度传感元件和一个灵活的SPI数字接口组成。
传感器的双排引脚封装保证在SCA3000-D1整个生命周期安全可靠的工作。
VTISCA3000-D1三轴加速度传感器在整个设计、生产和测试阶段都是以高稳定性、高可靠性、高质量来要求的,它的目标市场是汽车应用。
这个三轴加速度传感器在工作范围内具有极期稳定的输出(包括全温区,湿度和机械噪声环境下)。
详细参数:
电源电压:
2.35v—3.6v
量程:
±2g
输出方式:
SPI数字串口通信(64组缓冲存储器记录数据,在系统一级上面,有先进的性能和有效节能方式。
)
能耗:
2.5v,480uAMAX
尺寸:
7×7×1.8mm
优势特点:
1)VTi的SCA3000三轴加速度传感器开创了传感器技术的新标准。
SCA3000能耗非常低,性能高,开发简单,易于集成到各种应用当中去。
2)SCA3000-D01和D02在一些利用电池运行的环境当中有成功的应用。
应用包括各种终端的运动检测,报警系统,以及导航补偿和倾斜测量。
3)SCA3000-E01,E02,E04,E05是超低功耗的查破。
这对于手持设备有相当的便利。
相关的应用包括计步器,体育运动当中的监测器,游戏的输出设备,以及电子罗盘的倾斜补偿。
应用范围:
移动终端的运动检测和防盗系统,医疗系统
惯性导航,各种需要运动检测的系统
数字倾角仪中的倾斜感应
电子罗盘中的倾角补偿
六、倾斜角传感器设计实例
传感器的放置与数据测量:
对于轴加速度传感器,当它的传感方向和重力加速度方向一致时,假如此时为零倾斜角度,设加速度传感器测量结果为F(θ),θ为倾斜角度,g为重力加速度
对F求导
当时,
所以当倾斜角θ太小时,测量的分辨率就会太小,当角度足够大时精度才会上升。
所以对一轴倾斜角传感器的运用是:
把它的传感方向与重力加速度方向垂直时的状态设为零倾斜角度
为方便进行空间直角坐标系转换原理的演示,这里选取Y、Z两轴作为数据的测量轴,X轴方向的角度则为相应的倾角。
为测得X轴倾角,需要得到Y、Z两轴的数据:
坐标系被动变换:
空间内一点在空间内改变其位置,它的坐标应该是发生的变换,那么该点与原点连线的倾角也同样发生了变换。
换一个思路,可以认为是空间内的点没有动,而是其参考坐标系发生的变换。
这里,对于倾角的测量,主要采用后一种思想。
例如,仅考虑空间直角坐标系,设三维空间中的一点P,在某一个坐标系中P点的坐标为(x,y,z)。
假设有一个新的坐标系,他由原来的坐标系按空间原点静止不动的转动得到。
点P的新坐标为(x
’,y’,z’)。
现在就要考虑的问题是,在坐标变换后,P点坐标将如何在新的坐标系中表示;也就是说,如何用(x,y,z)的值来表示(x’,y’,z’)的值。
先从二维平面考虑:
将上述的平面坐标系逆时针转动一定的角度,(x1,x2),就已经变为了(x1’,x2’)
将上面两个图片重叠观察,下图:
新的x1’坐标OC等于x1在x1’轴上投影OA加上x2在x1’轴上的投影AC
新的x2’坐标OE等于x2在x2’轴上投影OD减去x1在x2’轴上的投影OF
其中DE=OF做不证明。
用三角函数表示为:
---1
---2
如果把xi’轴与xj轴之间的夹角的余弦值用下面的符号表示:
那么1、2两组公式可以等价写作:
--3
--4
通过上的3、4式,推广到3维空间直角坐标系可以有:
--5
引入记号:
方程可以写作:
引入实际的问题,如何计算倾角:
对上图,可做两次坐标轴变换分解:
先单独围绕Z轴做旋转:
可以得到下面[X’,Y’,Z’]的新的空间坐标系
再单独围绕Y轴做旋转:
可以得到下面[X’’,Y’’,Z’’]的新的空间坐标系
可以得到下面[X’’,Y’’,Z’’]的新的空间坐标系
由于传感器安装在列车上,当传感器发生了倾斜,可以理解为是坐标轴发生了变换:
设起始坐标系为[x,y,z],变换后的坐标为[X1,Y1,Z1]
运算化简有:
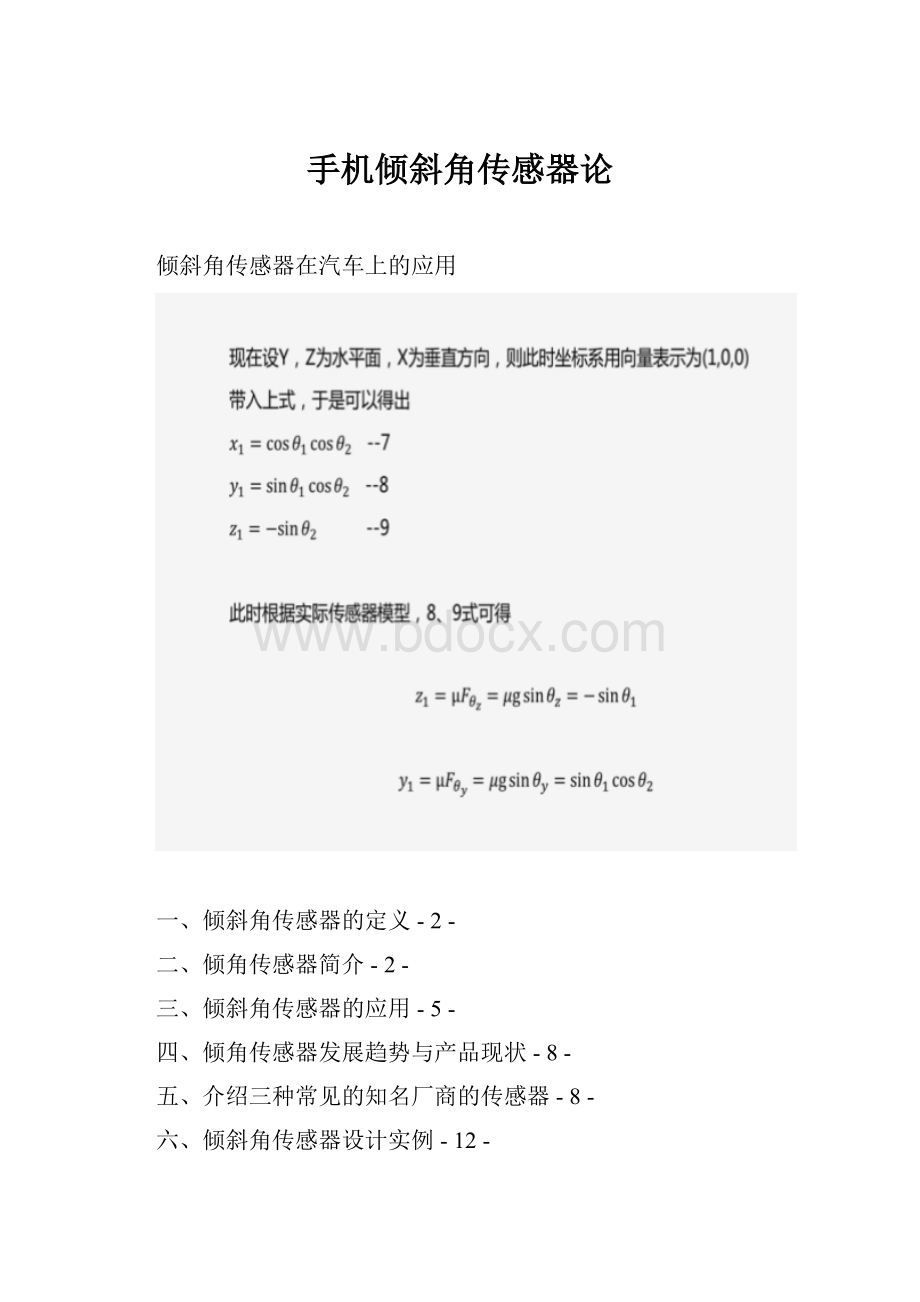
现在设Y,Z为水平面,X为垂直方向,则此时坐标系用向量表示为(1,0,0)
带入上式,于是可以得出
此时根据实际传感器模型
此时,令=,则。
注:
这里的三角变换与物理模型有关。
所求倾角:
现在要将上式中的,用传感器测的替换以便可以计算出实际的倾斜角:
至此,我们可以通过任意两轴的数值计算出任意时刻的全方位倾角值。
电路方案:
器件选择:
SCA3000系列三轴加速度计:
量程±2g,电源电压3.3V,64组缓冲存储器记录数据,SPI/I2C数字串口通信,抗冲击力强
LPC2210
LPC2210是基于一个支持实时仿真和嵌入式跟踪的16/32位ARM7TDMI-STMCPU的微控制器,CPU频率最大为60MHz,内置了SPI/I2C总线接口。
ZLG27290:
I2C接口显示驱动器,8个片选输出端、8个位选输出端
SCA3000系列传感器数据传输的两种方案:
方案1:
SCA3000–D01SPI
方案2:
SCA3000–D02I2C
这里选择SPI传输数据。
CA3000–D01其工作在2.35v-3.6v可以达到1.6MHz的最大传输速率,极高的传输速率,保证了在后续软件在滤波、坐标换算的计算上的实现实时数据的监测。
SCA3000-D01内部功能模块图:
外围电路:
ZLG27290:
I2C接口显示驱动器
LPC2210管脚分布:
管脚名称
LQFP144管脚号
类型
描述
P0.2
50
I/O
SCLI2C时钟输入/输出开漏输出(符合I2C规范)
P0.3
58
I/O
SDAI2C数据输入/输出开漏输出(符合I2C规范)
P0.4
59
I/O
SCK0SPI0串行时钟主机输出或从机输入的时钟
P0.5
61
I/O
MISO0SPI0主机输入/从机输出从机到主机的数据传输
P0.6
68
I/O
MOSI0SPI0主机输出/从机输入主机到从机的数据传输
SCA3000管脚:
引脚
名称
作用
引脚
名称
作用
1
NC
悬空
10
NC
悬空
2
XRESET
外置重启,低有效
11
SCK_SCL
SPI时钟(SCK)
3
INT
中断信号输出
12
MISO_SDA
SPI数据输出(MOSI)
4
CLK
数字地
13
MOSI
SPI数据输入(MISO)
5
DVSS
数字地
14
AVDD
模拟地
6
DVDD
数字电源
15
AVSS
模拟地
7
DVIO
数字I/O
电源
16
AVSS模拟电源
8
CSB
片选
17
ATSTIO
悬空
减小数据误差与角度计算:
1.数字滤波:
滤掉高频分量(列车震动、外力撞击等)
2.初始化校正:
减小零点漂移、温度漂移造成的误差
3.多次坐标系变换:
消除列车运行磨损等禁止状态时已经存在造成的误差。
数据计算:
在倾斜角计算中,首先读数据进行零点偏移补偿,接着对严重污染的数据丢弃,进行数据融合,再判断倾斜角度大小。
当角度较小时,利用两轴数据进行计算,当角度过大时运用第三轴数据进行计算。
参考文献
[1]窦振中.PIC系列单片机原理和程序设计[M].北京:
北京航空航天大学出版社,2000.
[2]王有绪.PIC系列单片机接口技术与应用系统设计[M].北京:
北京航空航天大学出版社,2001.
[3]何信龙,李雪银.PIC16C7X入门与应用范例[M].北京:
清华大学出版社,2002.
[4]彭树生.PIC单片机原理及应用[M].北京:
机械工业出版社,2002.
[5]王化祥,张淑英.传感器原理及应用[M].天津:
天津大学出版社,1997.
(注:
本资料素材和资料部分来自网络,仅供参考。
请预览后才下载,期待您的好评与关注!
)
 升级会员
升级会员 