PID校正.docx
《PID校正.docx》由会员分享,可在线阅读,更多相关《PID校正.docx(5页珍藏版)》请在冰豆网上搜索。
球杆系统PID校正
一、实验目的
1.会用PID法设计球杆系统控制器;
2.设计并验证校正环节;
二、实验要求
1.根据给定的性能指标,用凑试法设计PID校正环节,校正球杆系统,并验证。
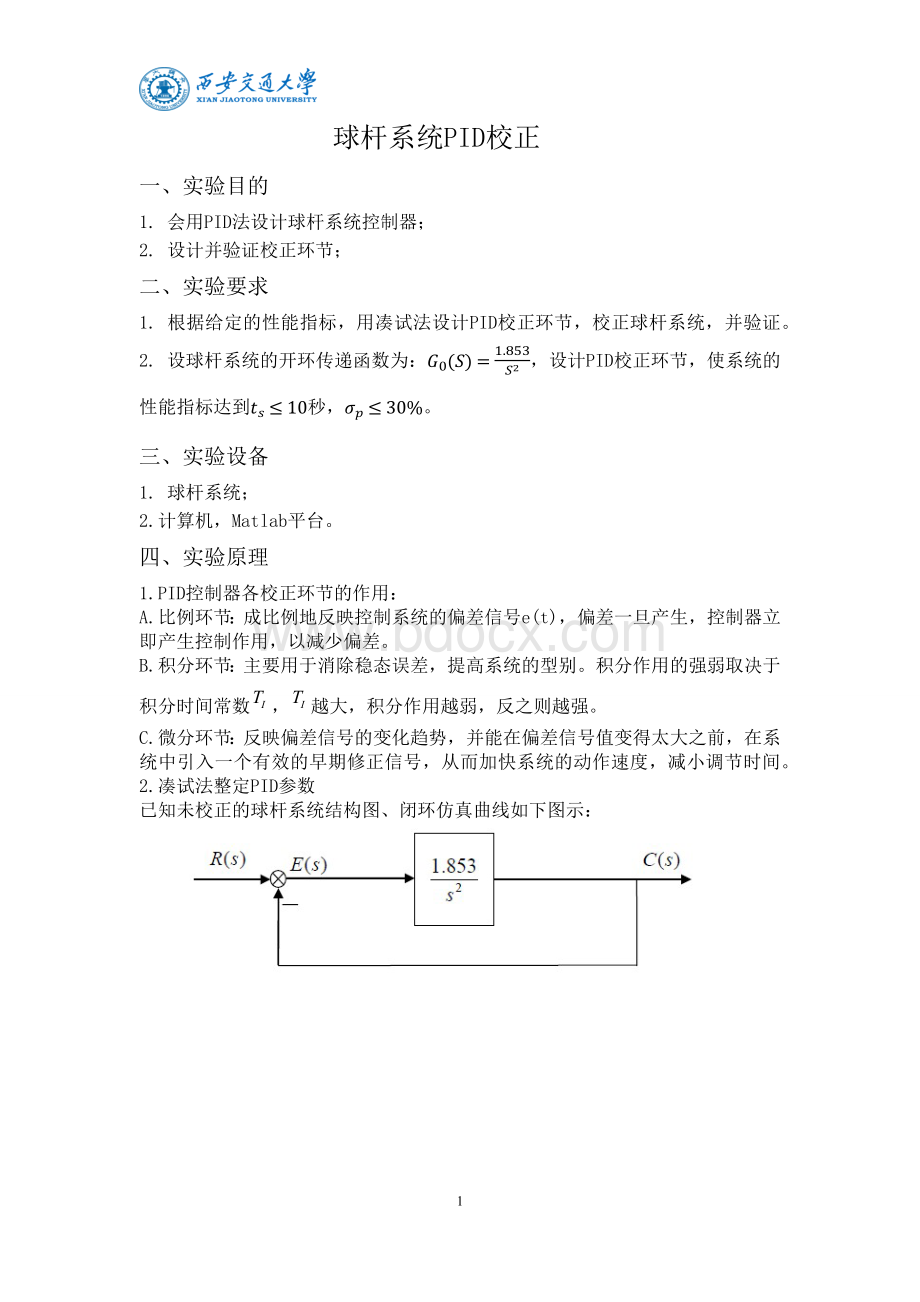
2.设球杆系统的开环传递函数为:
G0(S)=1.853S2,设计PID校正环节,使系统的性能指标达到ts≤10秒,σp≤30%。
三、实验设备
1.球杆系统;
2.计算机,Matlab平台。
四、实验原理
1.PID控制器各校正环节的作用:
A.比例环节:
成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减少偏差。
B.积分环节:
主要用于消除稳态误差,提高系统的型别。
积分作用的强弱取决于积分时间常数,越大,积分作用越弱,反之则越强。
C.微分环节:
反映偏差信号的变化趋势,并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
2.凑试法整定PID参数
已知未校正的球杆系统结构图、闭环仿真曲线如下图示:
从仿真曲线看出未校正系统震荡不稳定。
设球杆系统PID校正的结构图为如图2.2.5示:
要求采用凑试法设计PID校正环节,使系统性能指标达到调节时间小于10秒,超调量30%。
五、实验结果
1.未校正系统仿真
在MATLABSimulink中构建如下图所示系统的仿真框图,加入阶跃信号。
下图为得到的系统仿真曲线:
闭环系统系统震荡,必须设计控制器使系统稳定。
2.PID校正法仿真
最终控制程序如下图所示。
设置Kp=1.5,Ki=0.3,Kd=1.5
最终得到的系统仿真曲线:
从图上读得超调量20%,调节时间3.15秒,满足系统要求。
3、PID实时控制
实时控制界面
设置Kp=1.5,Ki=0.3,Kd=1.5
位移响应曲线
六.实验记录
控制器参数
性能指标
未校正系统
震荡,不稳定
校正系统仿真
kp=1.5ki=0.3kd=1.5
σ=20%,ts=3.15秒
校正系统实例
kp=1.5ki=0.3kd=1.5=
σ=52%,ts=22秒
七.实验分析
1、怎样确定PID控制器的参数?
答:
1、先设定比例参数。
若测量值在调整时趋势出现的波动次数较多,则放大比例参数;若趋势平缓且变化较慢,则缩小比例参数。
2、比例参数设定好以后,设定积分参数,若测量值在调整时趋势出现的波动次数较多,则缩小积分参数;若趋势平缓且变化较慢,则放大积分参数。
3、比例和积分参数设定好以后,设定微分参数。
若测量值在调整时趋势出现的波动次数较多,则放大微分参数;若趋势平缓且变化较慢,则缩小微分参数。
2、为什么系统仿真的结果和实时控制的结果相差很大?
为什么当PID参数取某些值的时候(如Kp=10,Ki=0,Kd=10),仿真结果很好,但实时控制时系统却震荡不稳定?
答:
系统仿真建立的模型是对实时系统的简化,忽略了许多线性或非线性的因素,但这些因素对结果是有影响的,这些因素包括:
运动副的摩擦,测量装置的误差,电机控制系统误差,信号采集系统的延时等。
当PID参数取某些值的时候,对于所建模型而言,校正效果是好的,但由于模型是一种简化,模型与实际系统之间还存在偏差,这些值对于实际系统还不是有效参数,所以实时系统会震荡不稳定。
3、为什么工业中PID控制能有广泛的应用?
答:
首先,PID应用范围广。
虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
其次,PID参数较易整定。
也就是,PID参数Kp,Ki和Kd可以根据过程的动态特性及时整定。
如果过程的动态特性变化,例如可能由负载的变化引起系统动态特性变化,PID参数就可以重新整定。
第三,PID控制器在实践中也不断的得到改进。
5
 升级会员
升级会员 