S120控制单元cu320调试纪录doc.docx
《S120控制单元cu320调试纪录doc.docx》由会员分享,可在线阅读,更多相关《S120控制单元cu320调试纪录doc.docx(17页珍藏版)》请在冰豆网上搜索。
S120控制单元cu320调试纪录doc
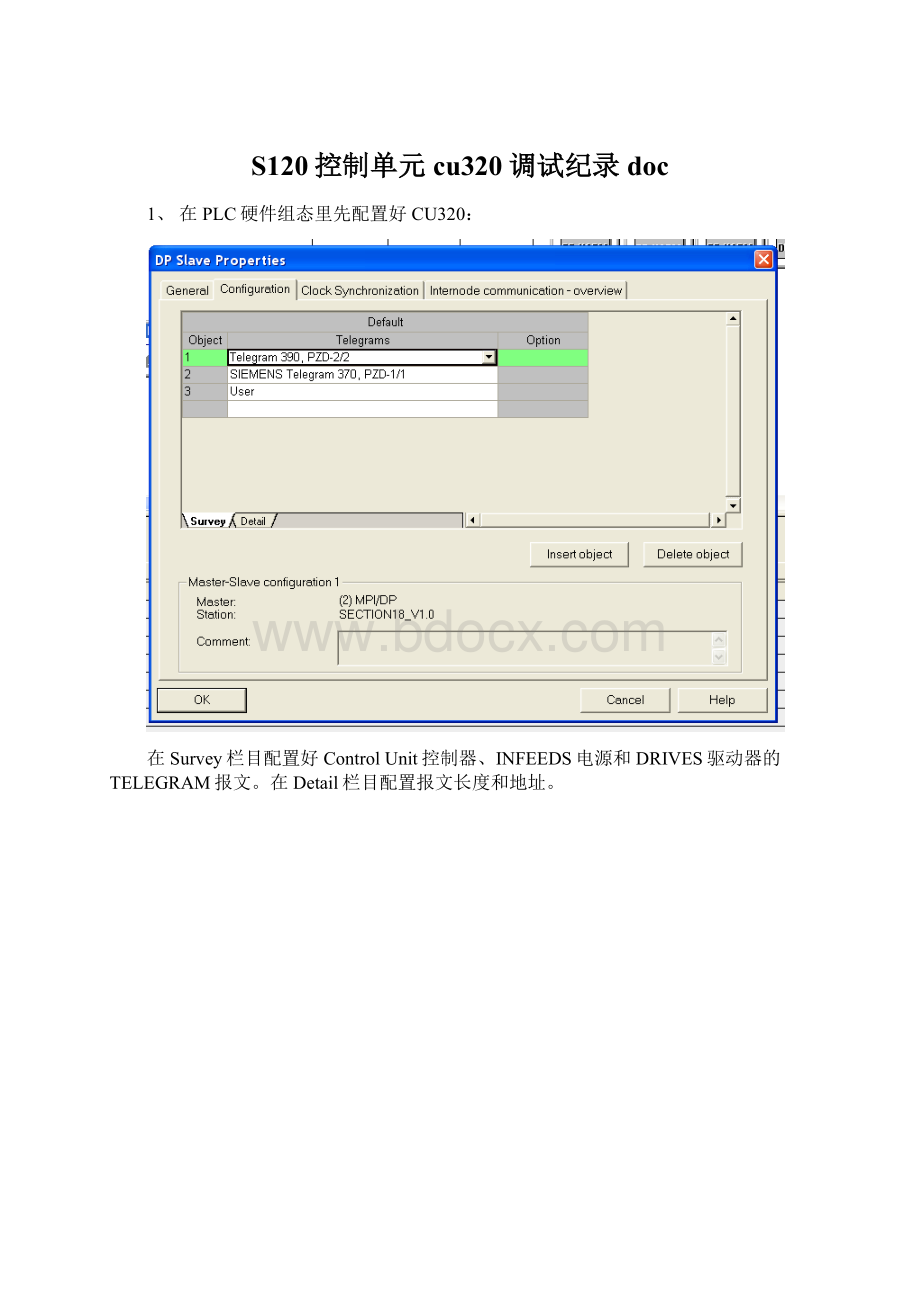
1、在PLC硬件组态里先配置好CU320:
在Survey栏目配置好ControlUnit控制器、INFEEDS电源和DRIVES驱动器的TELEGRAM报文。
在Detail栏目配置报文长度和地址。
2、配置完成后编译并保存,在Step7中会自动生成一个伺服配置:
3、双击在STARTER中打开所配置的伺服,选择ONLINE,在线前需要将CU320的DP拨码设置成和硬件组态中定义的一致。
4、在线后左边栏目中会出现AutoConfiguration选项,点击后选择Servo后会自动生成一个基本配置(包括ControlUnit控制器、INFEEDS电源和DRIVES驱动器,参数是自动读取上来的),首先需要对INFEEDS和DRIVES配置CONFIGURATION(默认既可):
5、
然后根据实际项目需要可能需要更改INFEEDS和DRIVES中的一些参数EXPERT—-EXPERTLIST:
INFEEDS:
P10–0READY;1—QUICKCOMMISSIONING(修改某些参数时需要在1状态,修改完成后需要改为0),P210Driveunitlinesupplyvoltage驱动器实际供电电压可能和选型不一致。
DRIVES:
Changeparameterp1821ifneedtochangedirection,p2571formaxspeed,p2572foraccelerationadjust,p2573fordecelerationadjust,p2585jogspeed
如果采用手动方式,需要在Configuredriveunit窗口中逐步配置,并修改以上的参数。
6、报文配置(包括控制器、电源和驱动器):
COMMUNICATION--PROFIBUS
7、配置结束后再执行一次DOWNLOAD到PG和ROM。
8、基本控制JOG方式:
COMMISSIONING–CONTROLPANEL(必须在ONLINE)
9、设置原点:
在HOMING弹出界面中按照需要的方式设置,设置完成后可以看到REFERENCEPOINTSET左边状态灯变成绿色。
10、原点设置完成后,再次下载(将原点设置保存到ROM中),断开PC控制,由PLC通过正确的报文来控制。
遇到的问题和解决方法:
1、出现SMARTMODE和不支持同步方式的报警:
需要在TOPOLOGY界面里将set和actual的树形结构变成一致(下面截图为离线状态,连线后会同时出现set和actual的比较画面)。
2、出现p1248[0...n]DClinkvoltagethresholdlower报警:
需要对drive的configuration中进行逐步配置:
3、出现controlpanel中switch-ondisableisactive的问题:
infeeds中参数r898.6被置位了,检查程序。
(可以将fb13的NW10中的L0.0BYTE2更换为DB1.DBX0.0BYTE2,其中DB1为自己新建,内容和TEMP区ZSWA结构一样。
)
4、如果是online状态下修改参数,要使修改参数生效,应该先执行项目上传,然后再下载到ROM中。
5、下载过程如果出现错误,可能需要先按下急停,断开plc的控制。
6、FB86中代码说明:
将P2507参数写数值2,将当前位置置0,并将偏移值写入P2525。
下面指令是将变化写入到ROM中:
参考点设置方法参考文档(P9-15)
绝对值编码器的回零方式有3种:
1.主动回零
2.直接设置参考点:
激活定位功能,接通运行使能P840,激活设置参考点命令P2596,将当前位置设置为P2599中的数值(比如0)。
3.被动回零:
启动寻零位,让伺服运动(JOG或MDI),当P488/489定义好的快速输入接通,将当前位置设为0。
以上3中方法,只有第一种方法可以掉电保存。
实际电流值(扭矩)的转换:
PCD_RD.RD_PCD.Torque(通过报文读来的电流/扭矩数值,可设置)/4000H(4000H对应100%),这个比数代表着实际扭矩和设定的基值电流/扭矩(基值电流在P2002中设置,默认是100A;参考扭矩在P2003中设置,默认是1NM)的百分比。
S120的一些常用参数:
实际速度,电流,扭矩显示值(平滑处理过,100ms),未处理的过程实际值为r63,r68,r80
速度,电压,电流,扭矩,功率,角度和加速度的基值:
PLCS120的报文(telegram111):
S120PLC的报文(telegram111):
安全停车功能:
硬件上:
两个端子必须同时动作,否则会产生错误。
相关参数:
P9601,9602,P9501
对于带抱闸的电机:
1.P1215必须设置为1-3,如果设置为0,即使电机运行,抱闸将一直关闭,直到烧毁。
2.如果要使抱闸一直打开,可以将P855设为1.
3.当P1215=1或者3,下面这些信号的丢失都会导致抱闸关闭:
p0844,p0845orp0852orasaresultofafaultwithOFF2response
4.如果导入的配置中选了"noholdingbrakepresent",系统会自动识别抱闸的类型,如果检测到抱闸,将自动将配置改为"motorholdingbrakeasforsequencecontrol".
5.如果使用的是电机内部抱闸,P1215不能设为3.
6.如果使用的是外部抱闸,P1215=3,且必须指定给r0899.12一个外部信号。
7.Whenthefunctionmodule"extendedbrakecontrol"isactivated(r0108.14=1),r1229.1shouldbeinterconnectedascontrolsignal.
Theparametercanonlybesettozerowhenthepulsesareinhibited.
Theparameterization"nomotorholdingbrakeavailable"and"SafeBrakeControl"enabled(p1215=0,p9602=1,p9802=1)isnotpracticalifthereisnomotorholdingbrake.
Theparameterization"motorholdingbrakethesameassequencecontrol,connectionviaBICO"and"SafeBrakeControl"enabled(p1215=3,p9602=1,p9802=1)isnotpractical.
如果使用的是安全抱闸继电器,第二个选项必须设置为Brakecontrolwithdiagnosticsevaluation。
如果使用的是普通抱闸继电器,第二个选项必须设置为Brakecontrolwithoutdiagnosticsevaluation。
参考
p2571EPOSmaximumvelocity
Changeable:
UT
Calculated:
-
Accesslevel:
1
Datatype:
Unsigned32
Dynamicindex:
-
Functiondiagram:
3630
Object:
SERVO(EPOS),VECTOR(EPOS)
Pgroup:
Basicpositioner
Version:
2603900
Groupofunits:
-
Unitselection:
-
Notformotortype:
-
Expertlist:
1
Min
Max
Factorysetting
1[1000LU/min]
40000000[1000LU/min]
[0]30000[1000LU/min]
Description:
Setsthemaximumvelocityforthefunctionmodule"basicpositioner"(r0108.4).
Dependence:
seealso:
r1084,r1087,p2503,p2504,p2505,p2506
Note:
Themaximumvelocityisactiveinalloftheoperatingmodesofthebasicpositioner.
Themaximumvelocityforthebasicpositionershouldbealignedwiththemaximumspeed/velocityofthespeed/velocitycontroller:
Rotaryencoders:
p2571[1000LU/min]=min(|r1084|,|r1087|)[1/min]xp2505/p2504xp2506/1000
Linearencoders:
p2571[1000LU/min]=min(|r1084|,|r1087|)[m/min]xp2503/10[m]
P2571
Y----15A,3000RPM72000
T----15A,3000RPM72000
X----8A,6000RPM100000
 升级会员
升级会员 