水箱液位控制系统课程设计.docx
《水箱液位控制系统课程设计.docx》由会员分享,可在线阅读,更多相关《水箱液位控制系统课程设计.docx(9页珍藏版)》请在冰豆网上搜索。
水箱液位控制系统课程设计
一、液位控制系统的原理分析
本次课程设计对水箱液位控制系统的设计是一个简单的控制系统,所谓简单液位控制系统通常是指有一个被控对象,一个检测变松单元一个控制器和一个执行器所组成的单闭环负反馈控制系统,也成为单回路控制系统。
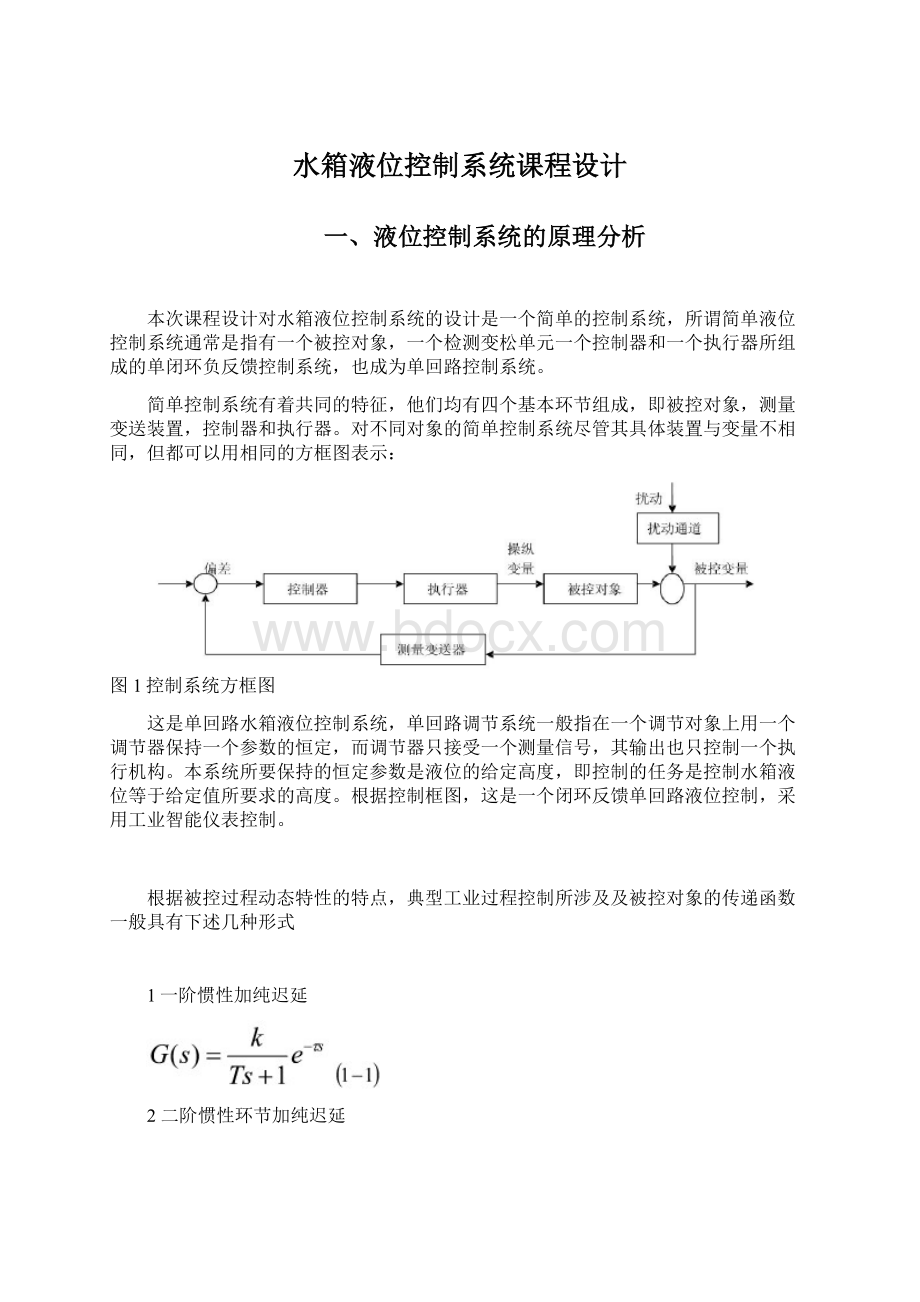
简单控制系统有着共同的特征,他们均有四个基本环节组成,即被控对象,测量变送装置,控制器和执行器。
对不同对象的简单控制系统尽管其具体装置与变量不相同,但都可以用相同的方框图表示:
图1控制系统方框图
这是单回路水箱液位控制系统,单回路调节系统一般指在一个调节对象上用一个调节器保持一个参数的恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。
本系统所要保持的恒定参数是液位的给定高度,即控制的任务是控制水箱液位等于给定值所要求的高度。
根据控制框图,这是一个闭环反馈单回路液位控制,采用工业智能仪表控制。
根据被控过程动态特性的特点,典型工业过程控制所涉及及被控对象的传递函数一般具有下述几种形式
1一阶惯性加纯迟延
2二阶惯性环节加纯迟延
3N阶惯性环节加纯迟延
上述3个公式只适用于自衡过程。
对于非自衡过程,其传递函数应包含有一个积分环节,即
二、建立被控对象数学模型
根据阶跃响应的实验数据如表1
t/s
0
10
20
40
60
80
100
140
h/m
0
0
t/s
180
250
300
400
500
600
700
800
h/m
20
表1阶跃响应数据
使用Matlab编辑.m文件,得出阶跃响应曲线。
Matlab程序如下:
t=[01020406080100140180250300400500600700800];
h=[000.20.82.03.65.48.811.814.416.518.419.219.619.820];
plot(t,h)
gridon
holdon
得到阶跃响应曲线再取0.39和0.62处的t值如图2、图3
图2阶跃响应曲线
(1)
图3阶跃响应曲线
(2)
根据τ=2t(0.39y(无穷)-t(0.63y(无穷))
T=2t(t(0.63y(无穷)-t0.39y(无穷))
可得出K=1、=55、T=147从而得到传递函数为
对该对象进行仿真如图4、图5:
图4原系统simulink结构图
图5阶跃响应曲线
三、控制系统参数的整定及MATLAB的数字仿真
3.1选择控制方案
选择PID单闭环控制,其控制原理图6如下:
图6控制系统原理图
通过调节中的PID参数使得广义对象的特性改善,减少调节时间。
3.2参数整定计算
建立对象的simulink模型,仿真如图7:
图7simulink模型
通过调节控制器中的PID参数,使调节时间减小,并且速度提升的前提下超调小于25%,且使稳态无差。
采用等幅振荡曲线法整定计算PID参数当,,时得等幅振荡曲线如图8
图8等幅振荡曲线
此时P=0.12,I=0.01,D=25,将三个数据带入PID调节器中得到图9
图9PID整定曲线
(1)
由图可知超调量>25%,继续调节PID参数I=0.005时得到图10,由图可知超调量25%。
图10PID整定曲线
(2)
四、系统调试、性能分析
(1)超调量δ=22%
(2)峰值时间:
(3)过渡过程时间
(4)余差y=1-1=0
(7)衰减比η=y1/y2=22
(8)衰减率Ψ
(9)振荡频率=2π
全部P、I、D的参数P=0.12,I=0.005,D=25
五、设计总结
在液位系统的控制器设计中,建立了被控对象的数学模型、利用MATLAB仿真及调试实验,同时完成软件设计方面的工作。
在本次毕业设计中,通过查阅大量的资料,使我的知识得以扩充,加深了对本专业的认识,这次毕业设计通过老师的指导以及自己的努力,我圆满的完成了任务,达到了设计的目的。
我学会了过程控制设计的基本方法,对系统的整体分析。
经过前面的大量研究工作,本课题得出了以下结论:
1采用测试法对液位系统进行模型分析,推导出了被控对象的数学模型。
2通过MATLAB的数字仿真,确定被控对象模型的正确性。
3采用稳定边界法对控制系统的参数进行整定。
4通过MATLAB数字仿真,对几种PID参数整定方法进行性能分析。
通过这次设计使我明白了有些东西看上去非常简单,当自己置身其中去做时,并不容易。
在毕业设计的这段时间里,我也发现了自己所应改进或是较为缺乏的部分,其一是分析问题的能力,可能是自己学习的不够扎实,实习中碰到了不少钉子,遇到问题时头脑茫然。
二是解决问题的成熟度,这也许是个性使然,再加上缺少经验的累积和历练所以在处理设计中的问题时,容易慌慌张张。
这次设计也让我在此体会到了书本上学习到的专业知识和实际应用起来是两个完全不同的概念,所以在现阶段的学习中,我们主要是应该去学习专业理论知识,学习掌握分析问题和解决问题的能力。
在以后的工作中,把理论和实际相结合,努力实现大学所学习的理论知识。
所以说,这次课程设计也是对以前所学知识的一个初审。
对于我以后学习,找工作也是受益匪浅。
我感性回到理性的重新认识,进一步对社会的认知,对于以后工作所应把握的方向也有所启发!
六、参考文献
[1]王琦.计算机控制技术.上海:
华东理工大学出版社,2009.
[2]王银锁.过程控制系统.北京:
石油工业出版社,2009
[3]何离庆.过程控制系统与装置.重庆:
重庆大学出版社,2003
[4]方康玲.过程控制与集散控制系统.北京:
电子工业出版啥,2009
[5]舒迪前.预测控制系统及其应用.北京:
机械工业出版社,2009
 升级会员
升级会员 