天大自动化控制系统与仿真课程设计实验报告.docx
《天大自动化控制系统与仿真课程设计实验报告.docx》由会员分享,可在线阅读,更多相关《天大自动化控制系统与仿真课程设计实验报告.docx(20页珍藏版)》请在冰豆网上搜索。
天大自动化控制系统与仿真课程设计实验报告
2012.11
3.对所有过程控制系统对象进行分析,分析所有参数的变化情况;
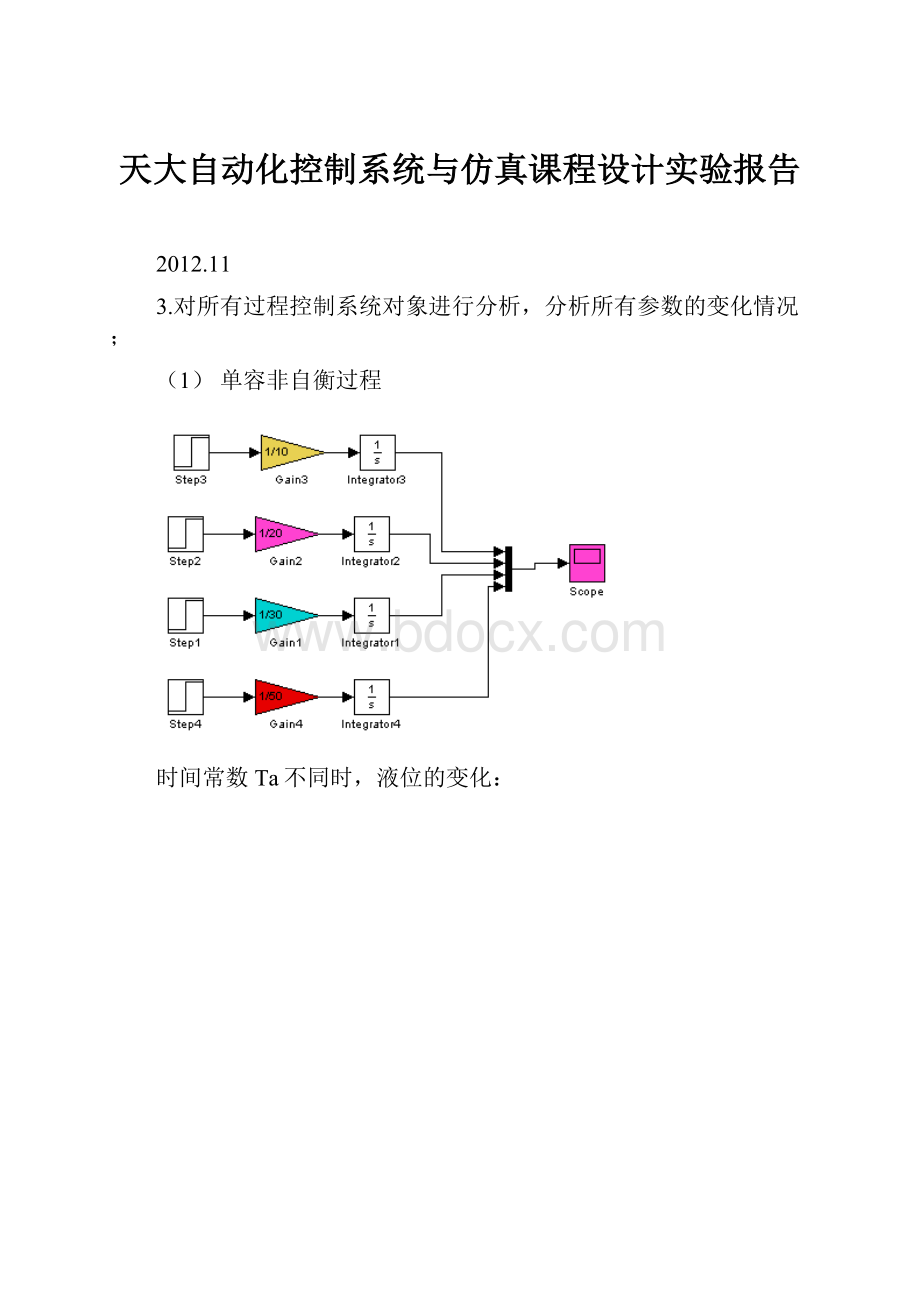
(1)单容非自衡过程
时间常数Ta不同时,液位的变化:
(2)单容自衡过程
放大系数K不同时,液位曲线的变化:
时间常数T不同时,液位曲线的变化
(3)多容非自衡
积分时间常数T不同时,液位曲线的变化
(4)多容自衡
放大系数K不同时液位曲线的变化
时间常数T不同时,液位曲线的变化
N不同时,液位曲线的变化
●对单回路控制系统的四个部分进行详细仿真;深入理解PID控制的原理;掌握PID三个参数对控制系统性能的影响;
我对控制器、被控对象和变送器进行了研究和仿真,程序和模型如下
%*****************¿ØÖÆÆ÷µÄÑо¿**************************************
%***********************************************************************
clear
T=19;K=1;Tao=0;Tao2=0;
%Kp²»Í¬Ê±µÄÊä³ö²îÒì
Kp=1;Ti=10;Td=0;
fori=1:
3
[t,x,y]=sim('PID_Controller',30);
subplot(2,2,1),plot(t,y(:
1));holdon
Kp=Kp+5;
end
xlabel('ʱ¼ät');
ylabel('Һλh');
title('Kp²»Í¬Ê±µÄÊä³öÇúÏß²îÒì');
%Ti²»Í¬Ê±µÄÊä³ö²îÒì
Kp=5;Ti=1;Td=0;Tao=0;
fori=1:
3
[t,x,y]=sim('PID_Controller',30);
subplot(2,2,2),plot(t,y(:
1));holdon
Ti=Ti+10;
end
xlabel('ʱ¼ät');
ylabel('Һλh');
title('Ti²»Í¬Ê±µÄÊä³öÇúÏß²îÒì');
%Td²»Í¬Ê±µÄÊä³ö²îÒì
Kp=3;Ti=5;Td=0;Tao=0;
fori=1:
3
[t,x,y]=sim('PID_Controller',30);
subplot(2,2,3),plot(t,y(:
1));holdon
Td=Td+10;
end
xlabel('ʱ¼ät');
ylabel('Һλh');
title('Td²»Í¬Ê±µÄÊä³öÇúÏß²îÒì');
%*************************±»¿Ø¶ÔÏóµÄÑо¿**********************************
%***********************************************************************
clear
Kp=10;Ti=10;Td=0;Tao2=0;
figure;
%K²»Í¬Ê±µÄÊä³ö²îÒì
K=1;T=10;Tao=0;
fori=1:
3
[t,x,y]=sim('PID_Controller',30);
subplot(2,2,1),plot(t,y(:
1));holdon
Kp=Kp+5;
end
xlabel('ʱ¼ät');
ylabel('Һλh');
title('K²»Í¬Ê±µÄÊä³öÇúÏß²îÒì');
%T²»Í¬Ê±µÄÊä³ö²îÒì
K=5;T=10;Tao=0;
fori=1:
3
[t,x,y]=sim('PID_Controller',30);
subplot(2,2,2),plot(t,y(:
1));holdon
T=T+20;
end
xlabel('ʱ¼ät');
ylabel('Һλh');
title('T²»Í¬Ê±µÄÊä³öÇúÏß²îÒì');
%*************************±ä²âÁ¿ËÍÆ÷µÄÑо¿**********************************
%***********************************************************************
%Tao²»Í¬Ê±µÄÊä³ö²îÒì
K=10;T=10;Tao=0;
Kp=5;Ti=10;Td=0;Tao2=0;
fori=1:
3
[t,x,y]=sim('PID_Controller',30);
subplot(2,2,3),plot(t,y(:
1));holdon
Tao2=Tao2+0.1;
end
xlabel('ʱ¼ät');
ylabel('Һλh');
title('Tao²»Í¬Ê±µÄÊä³öÇúÏß²îÒì');
结果如下:
●深入理解根轨迹法的基本原理;掌握根轨迹的绘制方法、增益的选择、稳态误差的消除措施等;
1.根轨迹的绘制方法、增益的选择
%×Ô¿ØP145Àý4.12
clear
num=[800];
den=conv([1,0],conv([1,4],conv([1,10],[1,20])));
G=tf(num,den);
sys=feedback(G,1);
s_1=-1.28+2.21i;
s_2=-1.28-2.21i;
k=abs(s_1)*abs(s_1+4)*abs(s_1+10)*abs(s_1+20);
kv=k/800;
num1=800*kv*[10.13];den1=conv([1,0],conv([1,4],conv([1,10],conv([1,20],[1,0.02]))));
G1=tf(num1,den1);
sys1=feedback(G1,1);
figure
rlocus(sys);holdon
rlocus(sys1);
figure
step(sys);
holdon
step(sys1);
2.稳态误差的消除措施
clear
n1=400;d1=conv(conv([10],[0.51]),[0.11]);
sope=tf(n1,d1);sys=feedback(sope,1);
step(sys);
%È·¶¨ÆÚÍû¼«µãλÖÃ
sigma=0.1;
zeta=((log(1/sigma))^2/((pi)^2+(log(1/sigma))^2))^(1/2);
wn=3/zeta;
%ÇóϵͳµÄÖ÷µ¼¼«µã
%zeta=0.591;wn=5.07;
p=[12*zeta*wnwn*wn];
roots(p);
%ÇóУÕýÆ÷µÄ´«µÝº¯Êý
kc=5;s_1=-3.00-4.09i;nk1=2;dk1=conv(conv([10],[0.51]),[0.11]);
ngv=polyval(nk1,s_1);
dgv=polyval(dk1,s_1);
g=ngv/dgv;
zetag=angle(g);
mg=abs(g);
ms=abs(s_1);
zetas=angle(s_1);
tz=(sin(zetas)-kc*mg*sin(zetag-zetas))/(kc*mg*ms*sin(zetag));
tp=(kc*mg*sin(zetas)+sin(zetag+zetas))/(ms*sin(zetag));
nk=[tz,1];dk=[tp,1];Gc=tf(nk,dk)
globalytncdc
n1=3;d1=conv(conv([10],[0.51]),[0.11]);
s1=tf(n1,d1);Gc=tf([0.2291],[0.04251]);
figure
sys1=feedback(s1*Gc,1);step(sys1,10);grid
●深入理解频域响应法的基本原理;掌握Bode图的绘制方法、带宽频率的选择;基于Bode图法调整控制系统的动态和稳态性能指标方法
%×Ô¿ØP209Àý5.18
num=[10];
den=conv([21],conv([11],[0.1,1]));
gh1=tf(num,den);
figure
(1);
bode(gh1);holdon
grid;
num=[100]
gh2=tf(num,den);
bode(gh2);
[Gm1,Pm1,Wcg1,Wcp1]=margin(gh1)
[Gm2,Pm2,Wcg2,Wcp2]=margin(gh2)
●串级控制系统的设计,与单回路比较;
●前馈控制系统设计,与单回路比较;
●其它控制系统设计,与单回路比较;
比值控制与单回路控制比较:
●数字PID控制算法的实验研究。
 升级会员
升级会员 