机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx
《机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx》由会员分享,可在线阅读,更多相关《机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立.docx(12页珍藏版)》请在冰豆网上搜索。
机器人技术大作业puma机器人的关节坐标建立DH参数表给出正逆运动学推导matlab工作空间建立
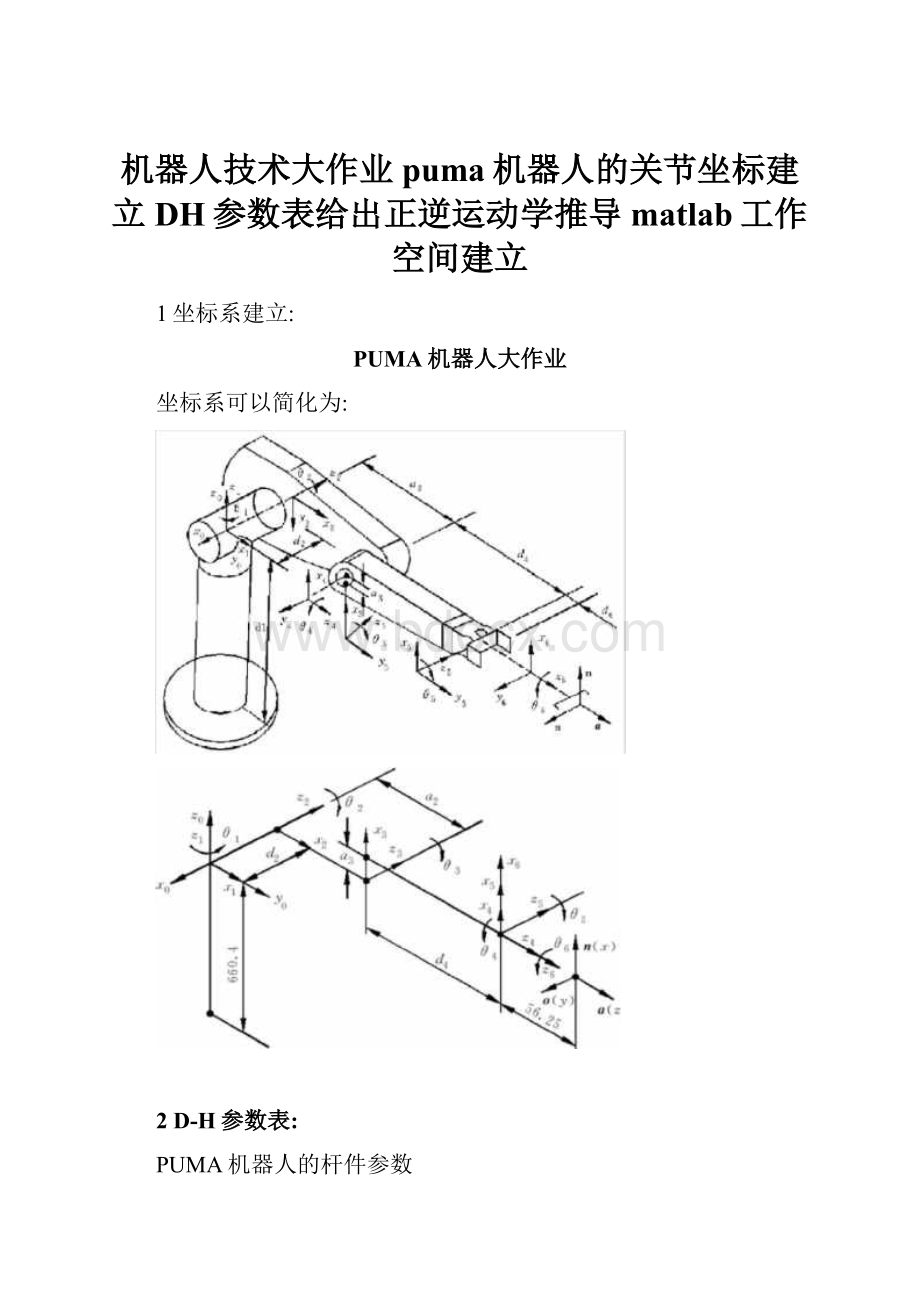
1坐标系建立:
PUMA机器人大作业
坐标系可以简化为:
2D-H参数表:
PUMA机器人的杆件参数
d10.6604m,d20.14909m,d40.43307m,d60.05625m,a20.4318m
a30.02032m
关节i
i
i
ai1
di
运动范围
1
90
0
0
0
-160。
~1600
2
0
-90
0
d20.14909m
-225°~45o
3
-90
0
a20.4318m
0
-45o~225o
4
0
-90
a30.02032m
d40.43307m
-110o~170
o
5
0
90
0
0
-100o~100
o
6
0
-90
0
d60.05625m
-266o~266
o
3正运动学推导
ci
si
0
a1
,ii
SiCi1
CiCi1
si1
disi1
由式Ti
可得
sisi1
cisi1
Ci1
diCi1
0
0
0
1
机械手变换矩阵
nxoxaxpx
0T6
nyoyaypynzozazpz0001
nx
c23(c6c5c4c1s6s4c1)s23c6s5c1
c6c5s4s1
ny
c23(c6c5c4s1s6s4s1)s23c6s5s1
c6c5s4c1
nz
s23(c6c5c4s6s4)c23c6s5
ox
c23(s6c5c4c1c6s4c1)s23s6s5c1
s6c5s4s1
oy
c23(s6c5c4s1c6s4s1)s23s6s5s1
s6s4c5c1
oz
s23(s6c5c4s6s4)c23c6s5
ax
c23s5c4c1s23c5c1s5s4s1
ay
c23s5c4s1s23c5s1s5s4c1
az
c23c5s23s5c4
px
a3c23c1a2c2c1d4s23c1d2s1
py
a3c23s1a2c2s1d4s23s1d2c1
pz
d4c23a3s23a2s2
s6c4s1
s6c4c1
c6c4s1
c6c4c1
4逆运动学推导
1.求1
用逆变换0Ti1左乘方程%0Ti工2T33T44T55T6两边:
0Ti10T6
Ci
Si
S!
0
0
Ci
0
0
0
0
1
0
0
0
0
1
nx
Ox
ax
得SiPx
C|Py
三角代换
Px
式中,
ny
nz
0
Oy
Oz
0
ay
az
0
Px
Py
Pz
1
d2
cos
Py
sin
22
-PxPy
atan2(Px,Py)
得到1的解
1atan2(py,px)atan2(d2,届p:
d;)
2•求3
10T6
平方和为:
d4S3a3C3
222,2,222
其中k
PxPyPzd2d4a2a3
2a2
解得:
3atan2(a3,d4)atan2(k,_d:
afk2)
C1C23
S1C23
S23
a2C3
nx
Ox
ax
Px
C|S23
SiS23
C23
a2S3
ny
Oy
ay
Py3T6
Si
C1
0
d2
nz
Oz
az
Pz
0
0
0
1
0
0
0
1
方程两边的元素(
1,4)
和(3,
4)
分别对应相等,得
C1C23P:
xIC23Py
S23Pza3
a2C3
0
ClS23P〉
C23P
za2S3
d4
0
联立,得
S23和C23
Q
a2Ssd4
GPx
SPy
Pz
a?
C3
a3
23
PxC1
2
PyS1
2
Pz
a2C3a3
GPx
S1Py
Pz
a2S3
d4
23
PxC1
2
PyS1
2
Pz
S23和C23表达式的分母相等,且为正,于是
23
23atan2QqSsqPxdPy
Pza2p3a3,a2C3
根据解1和3的四种可能组合,可以得到相应的四种可能值23,于是可得到
xSlpypza2S3d4
2的四种可能解
2233
式中2取与3相对应的值。
5.求5
0T410T6
c1c4c23s1s4
s1c4c23c1s4
s23c4
c3c4a2
d2s4
c4a3
nx
ox
ax
Px
s4c1c23s1c4
s4s1c23c1c4
s23s4
c3s4a2
d2c4
s4a3
ny
oy
ay
Py
4T6
c1s23
s1s23
c23
s3a2d4
nz
oz
az
Pz
0
0
0
1
0
0
0
1
6.求6
0T510T65T6
根据矩阵两边元素(2,1)和(1,1)分别对应相等,可得
nxc1c4c5c23
nyc4s1c5c23
s1s5s23s4c1c5
从而求得
6atan2s6,c6
5Matlab编程得出工作空间
可以将连杆6的原点做为机器人的动点,连杆
6原点相对于坐标系0就是°丁6的Px、Py、Pz,已
知:
Px
a3c23c1
a2c2c1
d4s23c1
Py
a3c23s1
a2c2s1
d4s23s1
Pz
d4c23
a3s23
a2s2
d2s1
d2c1
Matlab程序如下:
clc,clear
length2=431.8;length3=20.32;
d2=149.09;d4=433.07;
a=pi/180;
fora1=-160*a:
20*a:
160*a
fora2=-225*a:
20*a:
45*a
a3=-45*a:
20*a:
225*a
fork=1:
length(a3)
px(k)=cos(a1)*(length2*cos(a2)+length3*cos(a2+a3(k))-d4*sin(a2+a3(k)))-d2*sin(a1)
py(k)=sin(a1)*(length2*cos(a2)+length3*cos(a2+a3(k))-d4*sin(a2+a3(k)))+d2*cos(a1)
pz(k)=-a3(k)*sin(a2+a3(k))-length2*sin(a2)-d4*cos(a2+a3(k))
end
plot3(px,py,pz),title('机器人的工作空间'),xlabel('xmm'),ylabel('ymm'),zlabel('zmm')
holdon
gridon
end
end
机器人工作空间——三维空间:
机営人師工三间
1000
T
4
bou
400
200
300
■600
500
0
0
-503
ymm
-tDOD,kqo
iiinn
ciTirh
THANKS!
!
!
致力为企业和个人提供合同协议,策划案计划书,学习课件等等
打造全网一站式需求
 升级会员
升级会员 