闭环控制及现代机械通气.docx
《闭环控制及现代机械通气.docx》由会员分享,可在线阅读,更多相关《闭环控制及现代机械通气.docx(10页珍藏版)》请在冰豆网上搜索。
闭环控制及现代机械通气
闭环控制与现代机械通气
公元前3世纪,古希腊科学家Ktesibios发明了一种用于调节水钟内液平面的装置,他的这项发明至今仍在广泛应用,Ktesibios被誉为“闭环控制”(closed-loopcontrol)理论之父。
同样在公元前200年,中国古代工匠制造的指南车也应用了闭环控制原理。
但在此后的一千多年内,闭环控制技术却未得到实质性的发展。
直至近代,尤其是在第二次世界大战期间,闭环控制技术得到飞速发展,并且广泛应用于各种武器系统如军用飞机自动导航系统、火炮射击控制系统等。
而以二位著名科学家的XX命名的Boad流程图和Nyquist流程图至今仍在设计反馈系统时得到大量应用。
一、闭环控制的基本原理
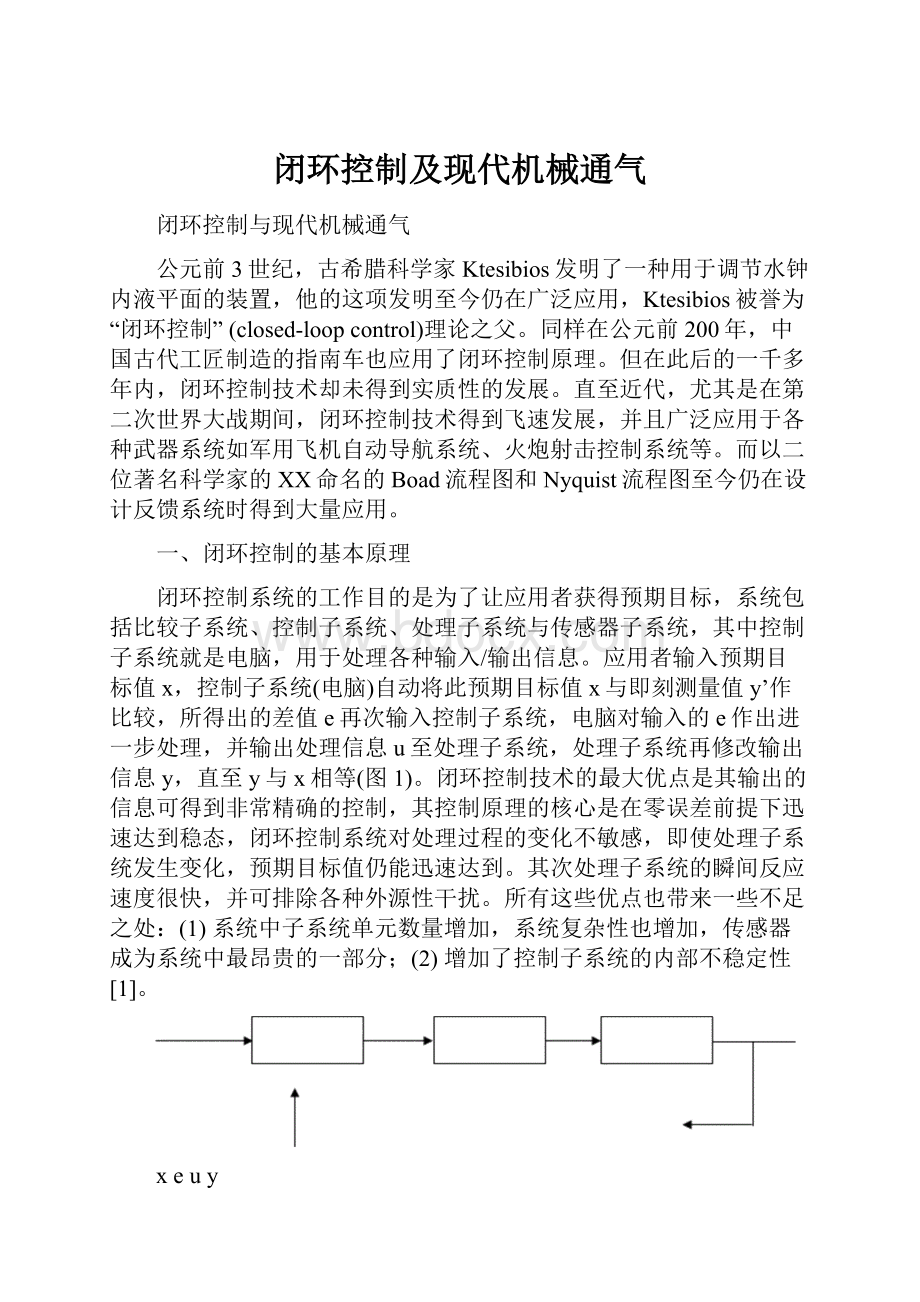
闭环控制系统的工作目的是为了让应用者获得预期目标,系统包括比较子系统、控制子系统、处理子系统与传感器子系统,其中控制子系统就是电脑,用于处理各种输入/输出信息。
应用者输入预期目标值x,控制子系统(电脑)自动将此预期目标值x与即刻测量值y’作比较,所得出的差值e再次输入控制子系统,电脑对输入的e作出进一步处理,并输出处理信息u至处理子系统,处理子系统再修改输出信息y,直至y与x相等(图1)。
闭环控制技术的最大优点是其输出的信息可得到非常精确的控制,其控制原理的核心是在零误差前提下迅速达到稳态,闭环控制系统对处理过程的变化不敏感,即使处理子系统发生变化,预期目标值仍能迅速达到。
其次处理子系统的瞬间反应速度很快,并可排除各种外源性干扰。
所有这些优点也带来一些不足之处:
(1)系统中子系统单元数量增加,系统复杂性也增加,传感器成为系统中最昂贵的一部分;
(2)增加了控制子系统的内部不稳定性[1]。
xeuy
比较子系统控制子系统处理子系统
y’
传感器
图1.闭环控制系统(反馈控制系统或伺服系统)的流程图
数学方程:
e=x-y’,u=f(u),y’=y
闭环控制系统应用于机械通气时,例如进行容积控制通气(VCV)时,输入信息为潮气量,吸入潮气量随着吸气阀开放时间的延长而增加,若患者气道阻力很小,吸气阀只须稍许打开,而当气道阻力很高时,吸气阀则可完全打开,这样无论气道阻力怎样变化,闭环控制系统总能提供恒定的吸气流速。
而在压力控制通气(PCV),闭环控制系统中输入信息为气道压力,而传感器则为压力传感器。
二、闭环控制在临床医学领域的发展
1953年,Saxton与Myers成为第一批开发闭环控制机械通气的科学家,他们试图让呼吸机自动调整吸气压力来控制PetCO2保持恒定[2]。
随后Frumin开发了第一个具有实用功能的闭环控制麻醉通气系统,通过应用其所设计的麻醉机,他发现围手术麻醉期间的“可重复步骤”如控制通气、氧气与麻醉气体的混合与气体浓度的监测等采用闭环控制可比人为控制更准确、有效。
Frumin对50例围手术期患者应用PetCO2闭环控制原理对其PaCO2进行调控,将每次呼气后测得的PetCO2与预设目标值进行比较,出现允许X围内的差值(ΔPetCO2)将导致下一次通气时吸气压产生0.2mmHg的调整,即闭环控制系统以PetCO2为靶目标,将吸气压作为输出变量[3,4]。
1973年,Coles等研制的闭环控制机械通气系统通过监测呼出气CO2浓度(FeCO2)、吸入氧浓度(FiO2)与麻醉气体容积等来反馈控制机械通气和麻醉深度,在保持通气频率不变的前提下,调整吸入潮气量(VT)来控制PetCO2。
其研究成果在动物实验中获得成功[5]。
1978年,Coon等在SiemensServo900C呼吸机上联接了一个动脉血pH传感器从而构成一个闭环控制系统,呼吸机自动调整潮气量以保持动脉血pH处于7.3~7.5X围内,此项实验亦获得成功[6]。
三、现代闭环控制机械通气
临床医师接触闭环控制理论是源自于SiemensServo900C呼吸机中的“Servo”一词,Servo(伺服)的含义即为闭环控制。
近年来开发的多种通气模式都应用闭环控制技术控制呼吸机输出的压力和/或容积,而且已能做到在一次通气内或每一次通气内对输出的压力和/或容积进行双重控制(dualcontrol)[7]。
1.一次通气内的双重控制即呼吸机对输出的潮气量由单纯的压力控制转为压力、容积双控制。
典型代表是容积保障压力支持通气(volume–assuredpressuresupport,VAPS)和压力扩增(pressureaugmentation,PA),其通气目标是在保证最小潮气量和分钟通气量的前提下减少患者呼吸作功(workofbreath,WOB)[8,9]。
VAPS和PA将传统压力控制通气中的初始高吸气流速与容积控制通气中的恒定潮气量相结合,吸气触发后呼吸机可根据患者的实际吸气需求自动调整吸气流速,气道压迅速到达预设吸气压水平,随后吸气流速逐渐降低以保持吸气压恒定,同时呼吸机内的微电脑自动将实际已释放的潮气量与预设潮气量进行比较,若发现仍未达到预设值,呼吸机便按预设吸气流速继续供气直至完成预设潮气量(图2)。
2.每一次通气内的双重控制即呼吸机通过自动调整吸气压水平以保持每一次通气的潮气量恒定不变。
典型代表包括压力调节容积控制通气(pressureregulatedvolumecontrol,PRVC)、适应性压力通气(adaptivepressureventilation,APV)与自动变流(autoflow)等,其通气目标是呼吸机随着患者呼吸系统力学特性的变化自动调整吸气压,并完成预定的潮气量和分钟通气量的释放。
此时呼吸机提供的每一次通气均为压力限制、容积切换方式,对每一次通气进行负反馈控制(图3)[10]。
吸气触发
吸气压达到预设值
是
实际潮气量≥预设值吸气流速降至25%峰流速
是否
吸气流速>预设值吸气终止
否
转为预设吸气流速
是否否是
吸气压<预设值实际潮气量≥预设值
图2.VAPS和PA的工作流程示意图
3.自动模式切换(automode)SiemensServo300A呼吸机具有此项功能。
automode将PRVC与容积支持通气(volumesupportventilation,VSV)结合在一起,若患者无自主呼吸,呼吸机提供PRVC模式控制通气,当患者出现连续2次自主呼吸时,呼吸机便自动切换为VSV模式辅助支持(图4)。
automode也可从VCV切换为VSV,故较适用于撤机阶段[11,12]。
指令触发
吸气压达到预设值(P=VT/Cst)
否
吸气时间=预设值
是
吸气终止
计算Cst(VT/ΔP)
否
实际潮气量=预设值重新设定吸气压
吸气压不变
图3.PRVC的工作流程示意图
吸气触发
吸气压达到预设值(P=VT/Cst)
否
吸气流速降至5%峰流速
是
吸气终止
计算Cst(VT/ΔP)
否
实际潮气量=预设值重新设定吸气压
吸气压不变
图4.VSV的工作流程示意图
4.分钟指令通气与适应性支持通气1977年,Hewlett等报道了一种新的通气模式—分钟指令通气(mandatoryminutevolume,MMV)[13]。
即呼吸机允许患者在预设分钟通气量水平以上自主呼吸,并每间隔一段时间计算实际分钟通气量,若实际分钟通气量低于预设值,呼吸机便提供指令通气直至达到预设值。
故又称为最小分钟通气(minimumminutevolume,MMV)。
不同型号呼吸机的MMV也不尽一样,有的采用双重控制技术,呼吸机根据患者的自主呼吸状况自动调整吸气压(HamiltonVeolar)[14]。
20世纪90年代Hamilton公司又开发出适应性支持通气(adaptivesupportventilation,ASV),呼吸机在每一次通气的基础上逐步调整各项通气参数(压力、通气频率和潮气量等),其通气目标是呼吸机在提供预设的分钟通气量的同时尽可能减少患者吸气作功。
ASV可根据患者的实际情况自动调整通气支持程度,适用于机械通气的各个阶段,在某种程度上被认为是一种“智能化”通气模式[15~17]。
5.比例辅助通气传统的机械通气模式提供患者恒定的通气支持,但不管患者的实际需求。
比例辅助通气(proportionalassistedventilation,PAV或proportionalpressuresupport,PPS)则不同,它通过对患者的吸气努力进行成比例的放大,提供辅助通气支持[18]。
在PAV中,吸气压力和吸入潮气量不再是预设值,而是随着患者的实际需求相应增减,呼吸机仅提供容积辅助(volumeassist,VA)和流速辅助(flowassist,FA)。
VA和FA分别用于克服呼吸系统的顺应性和气道阻力,但不能100%辅助,否则会出现“脱逸”现象(runaway),呼吸机便无法与患者的吸气努力保持同步。
PAV是一种正反馈控制机械通气模式,可明显改善人机协调性[19,20]。
四、模糊逻辑控制
20世纪60年代,在人工智能研究领域推出了一种新技术—模糊逻辑控制(fuzzylogiccontrol)。
模糊逻辑控制技术是人类试图寻求某种模拟人为调控方式来控制机械运作的一种手段,在应用模糊逻辑控制过程中,必须先对某一关键变量行“模糊化”处理,而这个“模糊化”处理的过程就是模拟人类自己思维方式的过程。
模糊逻辑控制技术在各个工业领域如制造业、纺织业等得到广泛应用,只是到了近10年,才开始应用于机械通气的设计[21]。
可以预见在不久的将来,模糊逻辑控制技术能辅助临床医师判断危重病患者的病情变化,作出相应的反应而无须人为干预。
模糊逻辑控制技术会应用于机械通气的各个环节。
闭环控制包涵了一系列技术,从最简单到相对复杂的。
最简单的闭环控制为根据一个输入信息而对一个输出变量进行控制,如压力支持通气(PSV);相对复杂的闭环控制则可根据多个输入信息来对多个输出变量进行调控。
近年来又有人开始研究根据人体神经生理反应来控制机械通气的支持程度以与将模糊逻辑控制技术应用于机械通气等课题[22]。
故闭环控制机械通气仍有很在的发展前景,随着新世纪的到来,越来越多的新型通气模式将会不断推出。
参考文献
1.BrunnerJX.Principlesandhistoryofclosedloopcontrolledventilation.RespirCareClinNAm,2001;7(3):
341-362
2.SaxtonGA,MyersGH.Anelectromechanicalsubstituteforthehumanrespiratorycenter.ClinResProc,1953;1:
116-117
3.FruminJM,BergmanNA,HoladayDA.Carbondioxideandoxygenbloodlevelswithacarbondioxidecontrolledartificialrespirator.Anesthesiology,1959;20:
313-320
4.FruminJM,LeeASJ.PhysiologicallyorientedartificialrespiratorwhichproducesN2O-O2anesthesiainman.JLabClinMed,1958;49:
617-629
5.ColesJR,BrownWA,LampardDG.putercontrolofrespirationandanaesthesia.MedBiolEng,1973;11(3):
262-267
6.CoonRL,ZuperkuEJ,KampineJP.SystematicarterialbloodpHservocontrolofmechanicalventilation.Anesthesiology,1978;49(3):
201-204
7.BransonRD,MacIntyreNR.Dual-controlmodesofmechanicalventilation.RespirCare,1996;41(4):
294-305
8.AmatoMBP,BarbosCSV,BonassaJ,etal.Volumeassistedpressuresupportventilation(VAPSV):
anewapproachforreducingmuscleworkloadduringacuterespiratoryfailure.Chest,1992;102(4):
1225-1234
9.MacIntyreNR,GropperC,WestfallT.biningpressurelimitingandvolumecyclingfeaturesinapatient-interactivemechanicalbreath.CritCareMed,1994;22
(2):
353-357
10.PiotrowskiA,SobalaW,KawczynskiP.Patientinitiated,pressureregulated,volumecontrolledventilationparedwithintermittentmandatoryventilationinneonates:
aprospective,randomizedstudy.IntensiveCareMed,1997;23(9):
975-981
11.KeenanHT,MartinLD.Volumesupportventilationininfantsandchildren:
analysisofacaseseries.RespirCare,1997;42(3):
281-287
12.SottiauxTM.Patientventilatorinteractionsduringvolumesupportventilation:
asynchronyandtidalvolumeinstability-areportofthreecases.RespirCare,2001;46(3):
255-262
13.HewlettAM,PlattAS,TerryVG.Mandatoryminutevolume:
anewconceptinweaningfrommechanicalventilation.Anaesthesia,1977;32
(2):
163-169
14.QuanSF,ParidesGC,KnoperSR.Mandatoryminutevolume(MMV)ventilation:
anoverview.RespirCare,1990;35(9):
898-905
15.LaubscherTP,FrutigerA,FanconiS,etal.Theautomaticselectionofventilationparametersduringtheinitialphaseofmechanicalventilation.IntensiveCareMed,1996;22(3):
199-207
16.CampbellRS,SinambanRP,JohannigmanJA,etal.Clinicalevaluationofanewclosedloopventilationmode:
adaptivesupportventilation(abstract).RespirCare,1998;43(10):
856
17.KollefMH,ShapiroSD,SilverP,etal.Arandomized,controllrdtrialofprotocol-directedversusphysician-directedweaningfrommechanicalventilation.CritCareMed,1997;25(4):
567-574
18.YounesM,PuddyA,RobertsD,etal.Proportionalassistventilation:
resultsofaninitialclinicaltrial.AmRevRespirDis,1992;145
(1):
121-129
19.AmbrosinoN,VitaccaM,PoleseG,etal.Short-termeffectsofnasalproportionalassistventilationinpatientswithchronichypercapnicrespiratoryinsufficiency.EurRespirJ,1997;10(12):
2829-2834
20.GayP,HessD,HolletsS,etal.Arandomized,prospectivetrialofnoninvasiveproportionalassistventilationvs.pressuresupportventilationtotreatacuterespiratoryinsufficiency(abstract).AmJRespirCritCareMed,1999;159:
A14
21.NemotoT,HatzakisGE,ThorpeCW,etal.Automaticcontrolofpressuresupportventilationusingfuzzylogic.AmJRespirCritCareMed,1999;160
(2):
550-556
22.SinderbyC,NavalesiP,BeckJ,etal.Neuralcontrolofmechanicalventilationinrespiratoryfailure.NatMed,1999;5
(2):
1433-1436
 升级会员
升级会员 