机械原理5.doc
《机械原理5.doc》由会员分享,可在线阅读,更多相关《机械原理5.doc(3页珍藏版)》请在冰豆网上搜索。
1、在曲柄摇杆机构中当行程速比系数K大于1时有急回特性。
()
2、一对渐开线齿轮传动的中心距永远等于两节圆半径之和。
()
3、凸轮机构中当从动件的加速度有有限量的突变时,存在柔性冲击。
()
4、加工直齿圆柱齿轮时,刀具的分度线应与齿轮的分度圆相切。
()
5、非周期性速度波动用飞轮调速,周期性速度波动用调速器调速。
()
二、填空题(5分)1、渐开线齿廓上最小压力角在_________圆上。
2、平面六杆机构共有__________瞬心。
3、斜齿圆柱齿轮的端法面模数有何关系?
________________________
4、在满足调速要求的前提下,飞轮应尽量装在_______速轴上。
5、一外啮合槽轮机构,槽数Z=6,槽轮停歇时间为1秒,运动时间为2秒,则槽轮机构所需的圆销数K是多少?
三、简答题(8分1、在齿轮机构中正变位与正传动有何区别?
2、凸轮机构中其压力角的大小对凸轮机构有何影响?
3、铰链四杆机构成为曲柄摇杆机构的条件是什么?
4、何为渐开线齿轮的可分性?
A
1
2
3
图5.1
图5.2
分度线
P
节线
图5.3
n1
n2
图5.4
r
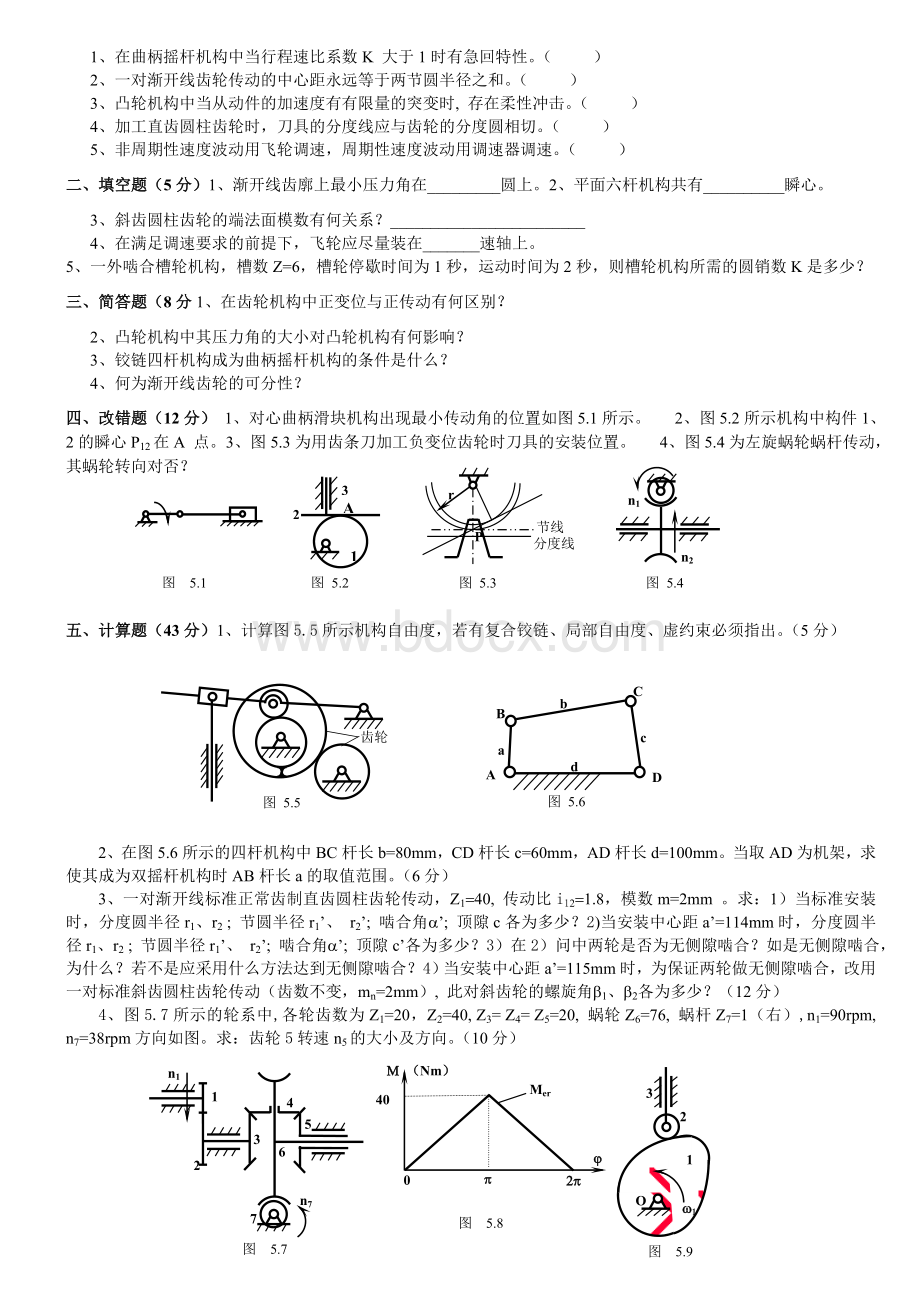
四、改错题(12分)1、对心曲柄滑块机构出现最小传动角的位置如图5.1所示。
2、图5.2所示机构中构件1、2的瞬心P12在A点。
3、图5.3为用齿条刀加工负变位齿轮时刀具的安装位置。
4、图5.4为左旋蜗轮蜗杆传动,其蜗轮转向对否?
五、计算题(43分)1、计算图5.5所示机构自由度,若有复合铰链、局部自由度、虚约束必须指出。
(5分)
齿轮
图5.5
图5.6
B
C
D
b
c
a
d
A
A
2、在图5.6所示的四杆机构中BC杆长b=80mm,CD杆长c=60mm,AD杆长d=100mm。
当取AD为机架,求使其成为双摇杆机构时AB杆长a的取值范围。
(6分)
3、一对渐开线标准正常齿制直齿圆柱齿轮传动,Z1=40,传动比i12=1.8,模数m=2mm。
求:
1)当标准安装时,分度圆半径r1、r2;节圆半径r1’、r2’;啮合角a’;顶隙c各为多少?
2)当安装中心距a’=114mm时,分度圆半径r1、r2;节圆半径r1’、r2’;啮合角a’;顶隙c’各为多少?
3)在2)问中两轮是否为无侧隙啮合?
如是无侧隙啮合,为什么?
若不是应采用什么方法达到无侧隙啮合?
4)当安装中心距a’=115mm时,为保证两轮做无侧隙啮合,改用一对标准斜齿圆柱齿轮传动(齿数不变,mn=2mm),此对斜齿轮的螺旋角b1、b2各为多少?
(12分)
4、图5.7所示的轮系中,各轮齿数为Z1=20,Z2=40,Z3=Z4=Z5=20,蜗轮Z6=76,蜗杆Z7=1(右),n1=90rpm,n7=38rpm方向如图。
求:
齿轮5转速n5的大小及方向。
(10分)
5
n7
n1
4
3
2
1
6
7
图5.7
O1
2
3
w1
1
图5.9
j
M(Nm)
Mer
400
2p
0
p
图5.8
5题图
5、机器主轴在稳定运动循环中,等效阻力矩Mer曲线如图5.8所示,等效驱动力矩Med为常量,主轴的平均角速度wm=40(1/S),安装在主轴上的飞轮转动惯量JF=0.1kgm2。
求:
(1)等效驱动力矩Med=?
(2)最大盈亏功△Wmax=?
(3)机械运转的不均匀系数d=?
(10分)
六、图解题(27分)
1、已知图5.9所示的凸轮机构,在图上标出:
1)基圆半径r0;2)图示位置从动件位移s和凸轮转角d;3)标出凸轮转角d=900时,从动件位移s’和在该位置的压力角a’。
(6分)
2、已知图5.10所示机构的位置、尺寸,构件1以匀速转动。
用矢量方程图解法求D点的速度和加速度。
(比例尺任选)(12分)
3、如图5.11所示机构,摩擦圆半径r、摩擦角f均为已知。
在图上画出各构件的受力图。
(9分)
M1
j
w1
Q
1
2
3
4
图5.11
A
B
C
D
E
1
2
3
4
w1
图5.10
w1
模拟试题五(机械原理A)答案
一、1.√;2.√;3.√;4.×;5.×。
二、1、基圆。
2、15。
3、。
4、高。
5、2。
三、1、正变位齿轮:
刀具向远离轮坯中心移位所加工的齿轮。
正传动:
的两变位齿轮传动。
分度线
P
节线
图5.3题
r
2、由公式,,传力性能好,结构大,经济性差;,传力性能差,结构小,经济性好。
3、最短杆+最长杆<其余两杆之和,固定最短杆的邻杆。
图5.2题
A
1
2
3
4、当a≠a'时,仍然可以满足瞬时传动比为常数。
四、1、如图5.1题所示。
2、如图5.2题所示。
图5.1题
n2
n1
图5.4题
3、下图5.3题为用齿条刀加工正位齿4、蜗轮的转向如图5.4题所示。
轮时刀具的安装位置。
五、1、n=5,Pl=6,Ph=2,F=1
2、40<a<80,120<a<240
3、Z2=72,1)r1=40=r1′,r2=72=r2′,a′=a=20°,c=0.5
2)a′=22.6°,r1′=40.7143,r2′=73.285,c′=2.5
3)不是,正传动。
4)b=13.12°
90o
图5.9题
4、n5=46,方向同n1(↓)
5、Med=20(Nm),ΔWmax=10p(J),d=0.1963。
六、1、解:
1)、2)和3)如图5.9题所示。
A
B
C
D
E
1
2
3
4
w1
图5.10题
w1
(B2,B3)
mv
P(c)
d
b3
b2
k’
r’
P’(c’)
d’
b3’
b2’
b3”
ma
2、
解:
影像vD,vD=pd.mv方向如图5.10题所示。
影像aD,aD=p’d’.ma
方向如图5.10题所示。
图5.11题
解:
此题中3构件是二力构件。
各构件受力图如图5.11题所示,受力平衡方程如下:
3构件:
2构件:
1构件:
3、
 升级会员
升级会员 