南京浦镇A型地铁车辆simpack动力学计算建模手册.doc
《南京浦镇A型地铁车辆simpack动力学计算建模手册.doc》由会员分享,可在线阅读,更多相关《南京浦镇A型地铁车辆simpack动力学计算建模手册.doc(69页珍藏版)》请在冰豆网上搜索。
南京浦镇A型地铁车辆动力学计算
SIMPACK建模记录
1创建文件
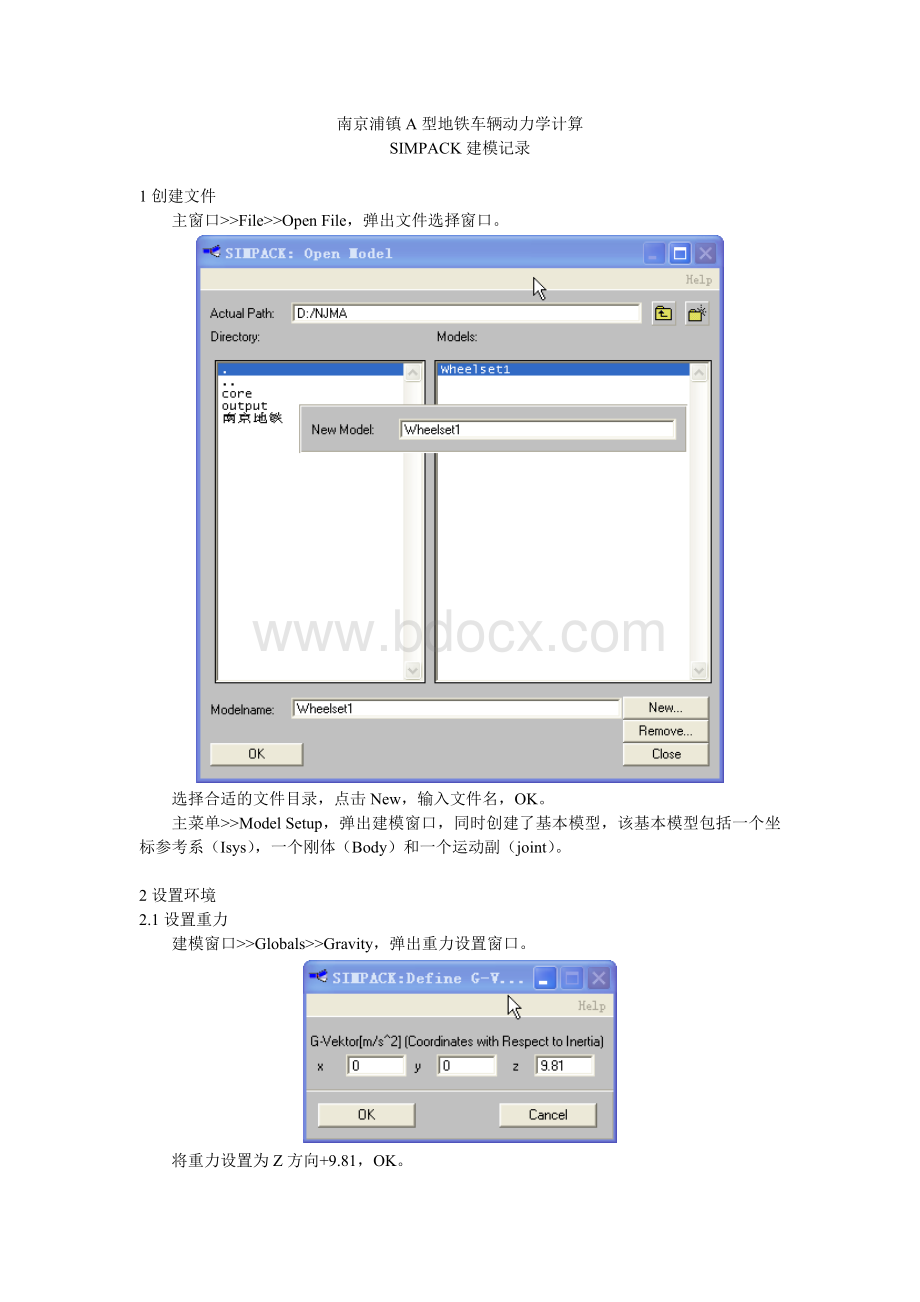
主窗口>>File>>OpenFile,弹出文件选择窗口。
选择合适的文件目录,点击New,输入文件名,OK。
主菜单>>ModelSetup,弹出建模窗口,同时创建了基本模型,该基本模型包括一个坐标参考系(Isys),一个刚体(Body)和一个运动副(joint)。
2设置环境
2.1设置重力
建模窗口>>Globals>>Gravity,弹出重力设置窗口。
将重力设置为Z方向+9.81,OK。
2.2设置视图
建模窗口>>View>>ViewSetup,弹出视图设置窗口。
选择【StandardViews】中的【wheel/Rail:
Perspectiveview】,OK。
3创建第1个轮对
3.1创建轮对刚体
建模窗口>>Element>>Bodies,弹出刚体元件窗口。
将Body1重命名为Wheelset1。
双击Wheelset1,弹出刚体参数设置窗口。
设置轮对的参数:
轮对的质量为1654kg,轮对的摇头转动惯量为726kg.m.m。
3.2创建轮对的外形
选择【3DGeometry】,弹出刚体外形设置窗口。
双击$P_Wheelset1_Cuboid,出现设置外形参数窗口。
设置车轴外形参数,见上图,OK。
回到刚体外形设置窗口,OK。
回到刚体设置窗口,OK。
4创建轮对的运动副和轮轨接触
4.1创建轮对的运动副
>>Elements>>Joints,出现运动副窗口,双击$J_Wheelset1,出现运动副设置窗口。
选择07号运动副,设置初始状态。
4.2创建轮轨接触
选择【Generate/UpdateWheel-RailElementsofJoint】,出现轮轨接触窗口。
选择OK,回到运动副设置窗口。
点击【AssembleSystem】,OK,完成车轮及轮轨接触运动副设置。
模型文件名:
Ametro_01。
5设置初始轨道
>>Globals>>Track,出现轨道设置窗口。
SIMPACK中,可以设置六种轨道形式:
(1)直线;
(2)圆曲线;
(3)直线+缓和曲线+圆曲线;
(4)直线+缓和曲线+圆曲线+缓和曲线+直线;
(5)两段方向曲线+直线;
(6)道岔;
5.1直线
【Toplogy】选择StraightTrack,输入线路总长度,OK。
程序调试时,通常采用直线形式。
模型文件名:
Ametro_02。
5.2曲线
曲线需要选择以下参数:
(1)缓和曲线超高类型(S形、直线形);
(2)超高形式(中心线、内轨式)
曲线的设置包括以下参数:
(1)直线长度:
(2)缓和曲线长度;
(3)圆曲线半径;
(4)曲线超高;
(5)超高测量值(默认1.506m);
(6)圆曲线长度;
(7)线路总长度;
6设置车辆总体参数
6.1车辆总体参数初步设置
>>Globals>>VehicleGlobals,出现车辆总体参数设置窗口。
设置轮对类型【WheelsetsofType】:
Wheelset1
设置车辆速度【v_vehicle】:
10m/s;
设置轨道参数模式【Railgaugegivenby】:
TrackGauge
设置左轮滚动圆半径:
0.42m;
设置右轮滚动圆半径:
0.42m;
设置车轮滚动圆横向间距之半:
(1.353+2*0.07)/2=0.7465m;
设置轨距:
1.435m;
设置轨距测量高度:
0.014;
设置轨底坡:
1/40;(如果没有轨底坡,则设为“0”)
设置左轮踏面外形:
S1002;
设置左轨外形:
UIC60;
设置右轮踏面外形:
S1002;
设置右轨外形:
UIC60;
设置轮轨接触模式:
【singlecontact】,【constraintcontact】,【Tableeveluation】。
选择【ApplyasDefaults】,Close,完成设置。
6.2保存设置
建模窗口>>File>>Save,建模窗口>>File>>Reload,系统自动完成轮对与线路的装配,如下图所示。
注意:
由于SIMPACK没有undo功能,因此在每一步完成后请存盘,然后重新载入模型,或者另存为一新文件。
6.3轮轨接触几何关系检查
当对车轮踏面和轨头外形设置完成后,可检查轮轨接触几何关系。
点击【CheckProfile/Tables】,出现轮轨接触几何关系检查设置窗口以及结果窗口。
6.4轮轨接触力计算设置
点击【ContactForce】,出现轮轨接触力计算设置窗口。
各选项说明如下:
蠕滑力计算理论:
默认为Kalker简化理论;
摩擦形式:
默认为常数;
摩擦系数:
默认取0.4;
车轮正压力小于等于零时:
(1)终止计算;
(2)垂向载荷变为零;
注意:
以上选项的存在条件时轮轨运动副设置为07或09。
轮对抬高量时:
(1)不作处理;
(2)跳起5mm时终止计算;(3)爬起5mm时终止计算。
6.5轮轨接触模式
6.5.1单点与多点接触
单点接触:
一点接触
多点接触:
最多三点接触——踏面、轮缘、轮背各一点。
6.5.2刚性与弹性接触
刚性接触:
(1)法向力等于约束力;
(2)避免高频振动,运算速度快;
(3)车轮只存在“假抬起”;
(4)可进行单点、多点接触计算。
弹性接触:
(1)用单侧弹簧和阻尼(18号元件)代替约束;
(2)法向力等于弹簧和阻尼合力;
(3)存在高频振动,计算速度慢;
(4)车轮可能抬起;
(5)仅适用于单点接触。
6.5.3轮轨接触模式的选择
(1)调试模型——单点刚性接触,不允许跳起;
(2)平稳性计算,线路激扰小——单点刚性接触,不允许跳起;
(3)平稳性计算,线路激扰大——单点刚性接触,允许跳起;
(4)脱轨安全性计算,大曲线——单点弹性接触,允许跳起;
(5)脱轨安全性计算,小曲线——多点刚性接触,允许跳起;
(6)曲线通过计算,可能出现大冲角——在线轮轨力计算;
模型文件名:
Ametro_03。
7创建第2个轮对
7.1创建轮对刚体
>>Element>>Bodies,弹出刚体元件窗口。
新建一个刚体,命名为Wheelset2,弹出参数设置窗口。
设置轮对的参数:
轮对的质量为1654kg,轮对的摇头转动惯量为726kg.m.m。
7.2创建轮对的运动副和轮轨接触
>>Elements>>Joints,出现运动副窗口(备注:
每创建一个刚体时,系统自动在该刚体上创建一个运动副)。
双击$J_Wheelset2,出现运动副设置窗口。
选择07号运动副,设置初始状态,S=2.5m(轴距)。
选择【Generate/UpdateWheel-RailElementsofJoint】,出现轮轨接触窗口。
选择【WheelsetType】与第1个轮对相同:
WheelsetType_1,OK。
回到运动副设置窗口,点击【AssembleSystem】,OK。
7.3保存设置
建模窗口>>File>>Save,建模窗口>>File>>Reload,系统自动完成轮对与线路的装配。
7.4创建轮对的运动副和轮轨接触
由于轮对的类型与第1个轮对相同,因此不需要再设置参数。
如果两个轮对的参数不同,则需要设置该参数。
模型文件名:
Ametro_04。
8创建构架
8.1创建构架刚体
>>Element>>Bodies,弹出刚体元件窗口。
新建一个刚体,命名为frame1,弹出参数设置窗口。
设置构架的参数:
动车构架的质量为3970kg,摇头转动惯量为4716kg.m.m(Izz),侧滚转动惯量为2058kg.m.m(Ixx),点头转动惯量为2936kg.m.m(Iyy)。
构架的质心为(0,0,-0.5),质心位置这样设置的好处是使得构架参考系的高度在轨面上,便于构架上其它Marker点的位置设置,这时在构架运动副中的高度不需要设置。
构架其它参数设置如下图所示。
8.2创建构架的外形
8.2.1构架的侧梁
选择【3DGeometry】,出现几何图形设置窗口。
重新名为Frame,选中进入图形设置窗口。
【Type】选择22:
WheelRailBogie。
设置参数如上图,OK。
8.2.2构架的前横梁
在几何图形设置窗口,增加新的几何图形travf,进入图形设置窗口。
【Type】选择01:
Cubiod,设置参数如上图,OK。
8.2.3构架的后横梁
在几何图形设置窗口,增加新的几何图形travb,进入图形设置窗口。
【Identifyto】:
travf,设置参数如上图,OK。
8.3创建轮对的运动副
>>Elements>>Joint,双击$J_Frame,出现运动副设置窗口。
【Jointtype】选择07:
GeneralWheel/RailJoint。
设置初始状态,S=1.25m(转向架质心纵向坐标)。
注意:
不要选择【Generate/UpdateWheel-RailElementsofJoint】。
8.4保存设置
建模窗口>>File>>Save,建模窗口>>File>>Reload。
模型文件名:
Ametro_05。
9创建一系悬挂
9.1创建轮对的Marks点
>>Elements>>Bodies,选择第1个轮对。
选择【Marks】,出现Mark点窗口。
新建轮对上Mark点,wheelset1_PS_L(0,-1,0)和wheelset1_PS_R(0,1,0)。
注意:
这里的坐标均为相对坐标,是相对刚性质心的坐标。
同样,创建第2个轮对Marks点,wheelset2_PS_L(0,-1,0)和wheelset2_PS_R(0,1,0)。
9.2创建构架的Marks点
Frame1_PS_FL(-1.25,-1,-0.42),Frame1_PS_FR(-1.25,1,-0.42)
Frame1_PS_BL(1.25,-1,-0.42),Frame1_PS_BR(1.25,1,-0.42)
实际上,构架上的Mark点与轮对的Mark点在空间的位置重合。
9.3创建一系弹簧
>>Elements>>Forces,新建一个力元件PS_FL1,出现了力元件设置窗口。
【ForceType】选择05:
SpirngDamperparallelCmp,设置一系弹簧参数,如上图。
小技巧:
选择【FromMarkeri】和【ToMarkerj】的顺序时,应尽量使得预平衡载荷【NonimalForce】为负值。
如果预平衡载荷为正值,可能回出现车轮离开轨道的情况,影响积分的速度,这时可将【FromMarkeri】和【ToMarkerj】的顺序颠倒,就能解决问题。
选择【3DGraph】,出现力元件形状设置窗口。
设置力元件外形,如上图,OK。
同理,设置其它一系垂向弹簧力元件,PS_FR1,PS_BL1,PS_BR1。
9.4保存设置
建模窗口>>File>>Save,建模窗口>>File>>Reload。
模型文件名:
Ametro_06。
10模型检查
10.1加速度检查
建模窗口>>Globa
 升级会员
升级会员 