对敏视达雷达回波进行基于phidp的dbz和zdr订正.docx
《对敏视达雷达回波进行基于phidp的dbz和zdr订正.docx》由会员分享,可在线阅读,更多相关《对敏视达雷达回波进行基于phidp的dbz和zdr订正.docx(52页珍藏版)》请在冰豆网上搜索。
对敏视达雷达回波进行基于phidp的dbz和zdr订正
对敏视达C波段雷达进行基于PHIDP的dBZ和ZDR订正研究
2014年4月5日~18日
1 雷达自身PHIDP的变化
1.1 一个月以来的变化
由于这部雷达的双通道接收机采用了半导体恒温设计,因此PHIDP随时间、环境温度的变化应该是比较小的。
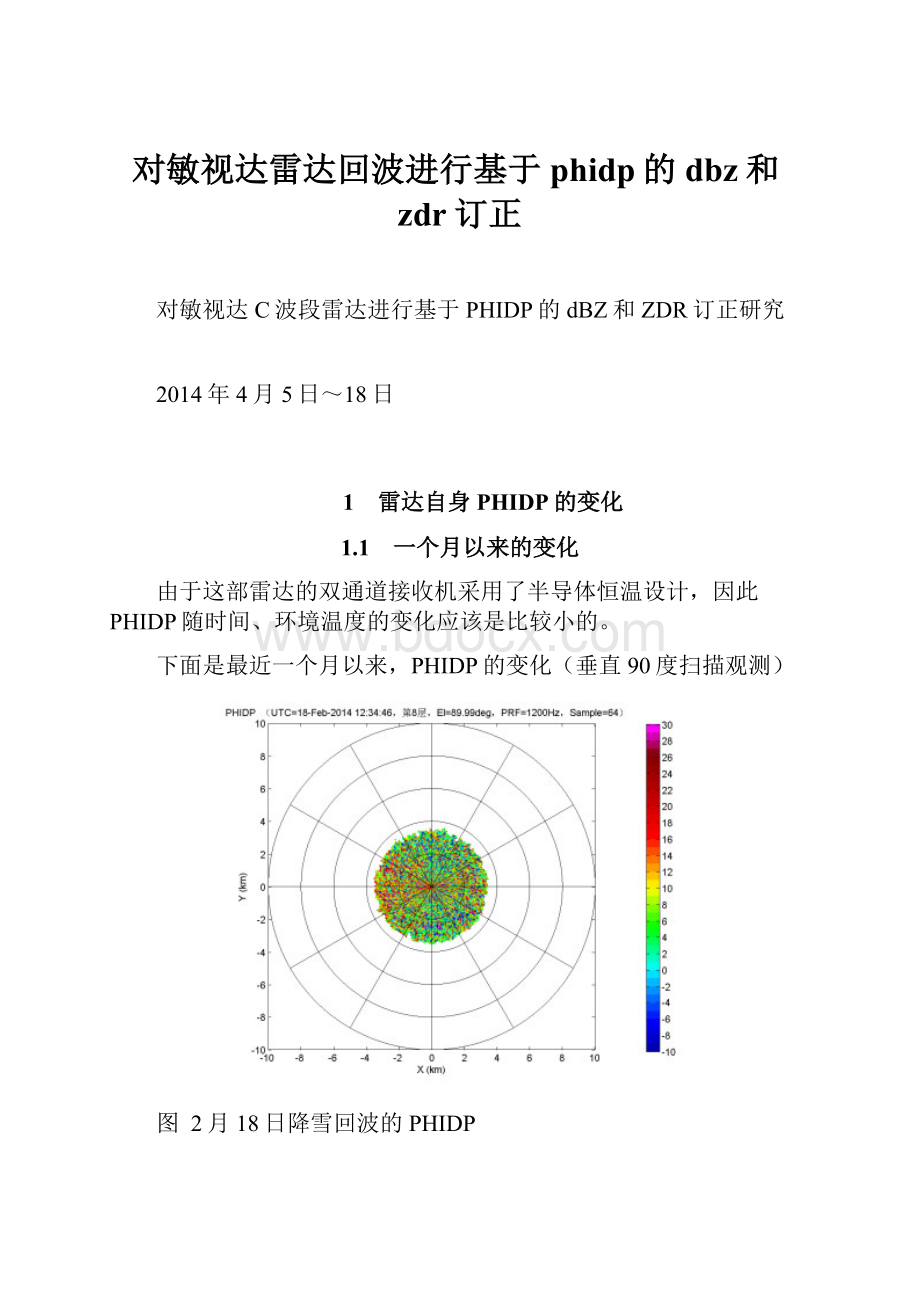
下面是最近一个月以来,PHIDP的变化(垂直90度扫描观测)
图2月18日降雪回波的PHIDP
图2月28日降水回波的PHIDP
图3月18日降水回波的PHIDP
图3月29日降水回波的PHIDP
注意:
这几张图的PHIDP的显示范围比较精细,从-10~+30度,因此虽然从画面上看,有很多随机的斑点,但实际上数据的方差是很小的。
从上面的四张图可以看出,在一个月以来,雷达自身PHIDP初始值的变化为:
约8度->4度->12度->14度。
这应该说是比较小的。
1.2 相连体扫之间的变化
下面三张是相邻体扫之间PHIDP的值:
可以看出,PHIDP的初始值在间隔几分钟的时间内,几乎没有变化。
1.3 小结
从上面的回波图可以看出,这部雷达自身PHIDP的变化是比较小的。
这也就说明,我们在进行PHIDP初始值的提取的时候,不需要每个径向都进行一次,也不需要每个天线周期都进行一次,而是可以在进行体扫的时候,利用垂直90度观测的数据(如果有合适的降水回波数据的话),来进行初始值的计算。
2 PHIDP的初始值的修正
2.1 从垂直90度的回波数据中提取PHIDP的初始值()
2.1.1 计算方法
首先,从零距离开始,去除最近的3个距离单元(一般是发射机的漏信号),连续10个距离库(注意:
如果距离的分辨率比较大,则不需要10个,5个即可。
总之,高度不要超过1500m)的CC>,且SNR>20dB,则将这10个库的PHIDP进行平均(起到平滑的作用,降低随机起伏),作为该径向上的初始值。
如果该径向上没有符合的结果,则为NaN(无效值)。
然后,将全方位上所有的径向上算出的PHIDP值,去除无效值,再去除最大和最小的10%,求出平均值。
如果样本数足够多(>100),则将平均值作为最终的结果输出。
注意:
对相位进行平均时,不能简单的将所有的值加起来求平均,而是要考虑到相位折叠的问题。
计算方法见matlab程序。
由于前面提到了:
雷达自身的PHIDP初始值变化很小,因此在这里进行计算的时候,我们就可以宁缺毋滥,去掉所有可疑的回波。
2.1.2 计算结果
对几个不同时间的基数据进行计算的结果如下(从文件名中可以看出数据的日期):
注意:
上面的最后两张图片是相邻2个体扫周期的图,可见:
相邻2个体扫周期的PHIDP的初始值,几乎没有变化。
2.1.3 小结
●通过垂直90度的回波计算的PHIDP初始值非常精确,不受四周地物等的影响;
●PHIDP初始值随着天线的转动有起伏(这是这部雷达一直存在的现象,估计与波导旋转铰链机械结构有关),起伏量为正负3度。
●起伏量为3度,会造成dBZ的订正误差为:
*3=;ZDR的订正误差为:
*3=。
可见,误差比较小,一般可以忽略。
如果为了精确修正,则需要考虑这个起伏量。
但目前我们就不考虑这个起伏了,只取平均值来作为PHIDP的初始值。
2.2 初始值修正()
2.2.1 计算方法
用matlab计算非常简单,代码如下:
=mod(-PHIDP_Initial_Result,360);%先转换到0~360度之间
(>180)=(>180)-360;%将凡是>180度的,减去360度,换算到-180~180之间
(<-180)=(<-180)+360;%将凡是>180度的,减去360度,换算到-180~180之间
2.2.2 计算结果
下面对各个仰角层面的PHIDP值,利用前面计算的PHIDP的初始值进行修正。
图21垂直90度的回波(修正前)
图22垂直90度的回波(初相修正后)
图23仰角=10度的回波(修正前)
图24仰角=10度的回波(初相修正后)
图25仰角=度的回波(修正前)
图26仰角=度的回波(初相修正后)
从上面对比的6张图可以看出,利用前面垂直90度扫描得到的PHIDP的初始值,可以很精确的将雷达在各个层面上扫描得到的PHIDP的初始相位修正正确。
下面我们用A显的方式,仔细观察一下各个不同的仰角层面,用垂直90度扫描得到的PHIDP的初始值进行修正之后的初始相位是否为零度。
图27仰角=度的回波(初相修正后)
图28仰角=度的回波(初相修正后)
图29仰角=度的回波(初相修正后)
图210仰角=度的回波(初相修正后)
从上面几张A显图可以看出,不同仰角层面的PHIDP的初始相位是基本相同的。
有一点差别,这是由于仰角的波导铰链,也会像方位波导铰链一样,会对PHIDP有点影响。
当然,对于那些将固态发射机安装在天线背面的固态体制雷达而言,由于没有了方位和仰角的波导铰链,因此PHIDP肯定就不再受到方位和仰角的影响了。
3 对PHIDP进行各种处理
3.1 剔除异常的PHIDP值
3.1.1 剔除准则的研究
下面是几张不同文件中,在不同的径向上,PHIDP和CC、SNR的关系:
图31在某条径向上,PHIDP、CC、SNR的关系
(1)
图32在某条径向上,PHIDP、CC、SNR的关系
(2)
图33在某条径向上,PHIDP、CC、SNR的关系(3)
通过对各种不同情况下的PHIDP和CC、SNR的波形对比,我们决定采用以下的准则:
●如果当前距离单元和前一个距离单元的PHIDP相差如果超过30度,则剔除;
●如果当前距离单元的SNR<3dB,或者CC<,则剔除;
完成上面两条准则之后,接下来还需要对PHIDP进行判断,要求前后的PHIDP都不是无效值,当前距离点才有效。
也就是说,若当前距离单元的值是有效的,则若前后1个距离单元的有一个无效,则将当前距离单元的值也设为无效。
另外,对对于第一个点和最后一点,要单独判断。
3.1.2 计算结果
处理结果如下:
图34在某条径向上,原始PHIDP和剔除虚假数据之后的对比
(1)
图35在某条径向上,原始PHIDP和剔除虚假数据之后的对比
(2)
图36在某条径向上,原始PHIDP和剔除虚假数据之后的对比(3)
图37在某条径向上,原始PHIDP和剔除虚假数据之后的对比(4)
可以看出,通过前面的判断准则,可以去除绝大多数地物、低SNR造成的错误的PHIDP值。
3.2 去折叠()
3.2.1 计算方法
去折叠的方法如下(详见Matlab程序):
●先选出所有不是NaN的数据,即有效的数据;
●然后计算相邻两个数据之差,依次判断差值,让差值在+-180度之间;
●然后采用了Matlab的一个巧妙的函数:
cumsum,就可以将相邻两个数据之差不断进行累加,就能完成去折叠的任务了
●最后,要将结果重新填到原来的数组中(原来数组中的NaN数据不变)
3.2.2 计算结果
下面我们故意将PHIDP加上一个初始值(这里是170度),以便能对去折叠的效果进行测试。
如果不加初始值的话,则看不出去折叠的效果。
(因为这几组数据的回波强度不够强,回波的PHIDP还没有达到180度的量级,因此PHIDP根本就没有折叠)
原始的PHIDP随距离的变化如下:
图38未经过去折叠处理的PHIDP
经过去折叠处理之后的图如下:
图39经过了去折叠处理的PHIDP
更换了另一组数据进行测试,原始的PHIDP(故意加了150度的初始值)随距离的变化如下:
图310未经过去折叠处理的PHIDP
经过去折叠处理之后的图如下:
图311经过了去折叠处理的PHIDP
可见,这种方法是能完成去折叠的处理的,并且即使数据中存在无效数据(无效数据是由于回波的SNR太低等原因,被剔除掉的),也不会影响去折叠的计算。
3.3 平滑滤波
3.3.1 确定参与平滑滤波的点数
总所周知,参与平滑滤波的点数越多,则平滑效果越好,但是会影响对小范围强回波的计算。
因此,首先要合理、科学的确定需要前后多少距离范围内的点参与平滑滤波计算。
在国内外的文献中,普遍采用根据数据的质量,将参与计算的前后距离的长度分为几种类型,例如:
●对于SNR>40dB且CC>的数据且dBZ>50dB,属于数据比较好的点,采取前后1km内的点参与计算;
●对于其它的数据(低SNR、低CC),属于数据比较差的点,采取前后更多点的点(4km)进行滤波;
●对于处于中间的点,则采用前后2km内的点参与计算;
但是,我们发现采用分为几种类型的方法,一方面难以控制分类的门限准则;而且在回波数据处于分类的交接区的时候,会造成计算出来的PHIDP有一些不合理的振荡现象。
因此,经过多次试验,我们最终采用了一种新的办法来得到需要前后多少点,该方法是根据CC、SNR和dBZ的值,自动计算出需要前后多少距离范围内的点参与计算。
关键代码如下:
if(CC>
if(SNR>20)
ifdBZ>50
DataLength_km=1;
elseifdBZ<20
DataLength_km=5;
elseif~isnan(dBZ)
DataLength_km=5-(dBZ-20)/;
else
DataLength_km=5;
end
else
ifSNR>20
DataLength_km=5;
elseifSNR<0
DataLength_km=10;
elseif~isnan(SNR)
DataLength_km=10-SNR/4;
else
DataLength_km=10;
end
end
else
DataLength_km=10;
end;
经过上述计算得出的“前后多少距离范围”,还要进行相邻10点的平滑,以便得出一个更稳健的距离范围(详见第Error!
Referencesourcenotfound.章)。
下图是根据某条径向上的SNR和dBZ的值,计算出来的需要前后多少距离范围内的点参与后续的PHIDP平滑滤波计算:
图312自动计算出来的、需要前后多少距离范围内的点参与计算
图313与前一张图对应的PHIDP与SNR的图
从上图可以看出,如果dBZ或SNR比较高,则参与平滑滤波计算的点数比较少;反之,则参与计算的点数比较多。
3.3.2 平滑滤波计算
下面要遍历每个距离点,用该距离点前后一定区间内的PHIDP值,进行平滑滤波计算。
注意:
这段代码比较耗费时间,以后需要优化。
但如果用C++实现,则速度应该很快的。
在进行计算的时候,需要注意如果参与计算的点数<20,则说明有效的点数太少了,为了计算的精确,需要将参与运算的前后距离范围增加1倍。
另外,如果发现在当前距离点的左边或者右边没有足够的数据(至少要有4个数据才行),则还要将参与运算的前后距离范围再增加1倍。
平滑滤波的算法有两种:
●用Matlab的polyfit函数实现的常用的一元线性回归;
●用Matlab提供的robustfit实现的鲁棒线性回归;
一元线性回归的主要代码如下:
p=polyfit(KDP_Calc_Index_No_NaN',KDP_Calc_PHIDP_No_NaN,1);
PHIDP_Select_Temp(ii)=polyval(p,ii);
KDP_Select_Temp(ii)=p
(1)/*1e3;
鲁棒线性回归的主要代码如下:
brob=robustfit(KDP_Calc_Index_No_NaN,KDP_Calc_PHIDP_No_NaN);
PHIDP_Select_Temp(ii)=brob
(1)+brob
(2)*ii;
KDP_Select_Temp(ii)=brob
(2)/*1e3;
经试验,这两种算法的效果都很好。
但是,一元线性回归的计算速度快得多。
3.3.3 计算结果
图314在某条径向上,PHIDP的平滑滤波前后对比
图315在某条径向上,PHIDP的平滑滤波前后对比(近距离处地物干扰)
图316在某条径向上,PHIDP的平滑滤波前后对比(强回波,高斜率)
图317在某条径向上,PHIDP的平滑滤波前后对比(远处弱信号)
3.3.4 小结
通过PHIDP在不同距离段上、平滑滤波的表现,我们可以发现:
通过合理、科学的确定需要前后多少距离范围内的点参与平滑滤波计算,然后采用线性回归的方法,可以很好的实现PHIDP的滤波任务。
同时,线性回归还能将前面剔除的、异常PHIDP值所在的距离单元上的值,用线性内插的方式填充起来。
3.4 对一些问题的说明
3.4.1 为何不采用FIR滤波器对PHIDP进行平滑滤波
我们认为,FIR滤波器用于PHIDP的平滑滤波存在以下的缺陷:
●由于FIR滤波器不具备对奇异的点的抵抗能力,因此万一有一个奇异点(由于地物抑制不干净、非气象回波等原因),则会严重影响计算的结果。
而线性回归的算法就具备这个抵抗奇异点的能力。
●由于前面进行了“剔除异常的PHIDP值”的处理,那些异常值的距离单元的PHIDP,也要想办法给恢复出来(如果这些距离单元的PHIDP值直接扔掉了,最终的dBZ和ZDR的画面上就会出现比较多的缺失)。
而FIR滤波器难以完成这个插值的功能,只有本文中提到的线性回归才适合完成这件事情;
●由于需要根据不同的数据质量,选择不同的参与平滑滤波的点数,而FIR滤波器难以做到根据点数而变化(因为FIR的阶数一般都是预先设计好的);
●还有一条:
线性回归的计算量也要比FIR滤波器要少。
3.4.2 一元线性回归和鲁棒线性回归的比较
我们挑选了一组PHIDP起伏很大的数据,来比较两种方法的效果。
用Matlab的polyfit函数实现的常用的一元线性回归的效果如下:
图318polyfit函数实现的常用的一元线性回归的效果
(1)
用Matlab提供的robustfit实现的鲁棒线性回归的效果如下;
图319robustfit实现的鲁棒线性回归的效果
(1)
再换一组PHIDP起伏很大的数据,再比较两种方法的效果:
图320polyfit函数实现的常用的一元线性回归的效果
(2)
图321robustfit实现的鲁棒线性回归的效果
(2)
对比两种方法发现,这两种算法的效果都很好,能很好的起到平滑滤波的作用,基本不受异常点的影响。
但是,一元线性回归的计算速度快得多,而且容易用C++实现。
因此,今后的基于C++的信号处理程序,将采用polyfit的一元线性回归来实现。
3.4.3 对前后多少距离范围,再相邻10点的平滑的说明
在确定参与平滑滤波的点数的时候,我们提到:
自动计算出需要前后多少距离范围之后,还需要对前后多少距离范围,进行相邻10点的平滑,以便得出一个更稳健的距离范围。
那么,为何还要仅有相邻10点的平滑呢?
先绘制一张不经过相邻10点平滑,直接就是自动计算出的需要前后多少距离范围的图(横轴是距离,竖轴是需要前后多少距离范围):
图322计算出的需要前后多少距离范围的图
下图是此时,经过PHIDP滤波后的图:
图323根据前后多少距离范围,对PHIDP进行滤波后的图
从上面两张图可以看出,由于回波的SNR、dBZ天生就存在起伏,从而就造成了“前后多少距离的点参与后续计算”也会发生很大的起伏。
而这个起伏就会造成对PHIDP的平滑滤波效果大大下降,会出现不合理的振荡现象。
注意:
在国内外的文献中,一般采用根据数据的质量,将参与计算的前后距离的长度分为几种不同的情况。
由于回波天生存在的起伏,当回波数据处于分类的交接区的时候,也会造成平滑滤波后的PHIDP出现不合理的振荡现象。
下面是对自动计算出的前后距离,进行10点平滑之后的图(横轴是距离,竖轴是需要前后多少距离范围):
图324计算出的需要前后多少距离范围,再进行10点平滑的图
下图是此时,经过PHIDP滤波后的图:
图325根据10点平滑后的距离范围,对PHIDP进行滤波后的图
从上面两张图可以看出,经过对“前后多少距离范围”经过10点平滑之后,可以得出一个更稳健的距离范围。
然后再以这个距离范围内的PHIDP数据点,进行平滑滤波,效果就非常好了。
当然,对“前后多少距离范围再进行10点平滑,得到更稳健的距离范围”这件事情并不是非常必需的。
也就是说,即使不采取这个措施,经过平滑滤波之后的PHIDP,以及推算出的KDP,已经比信号处理器直接给出的PHIDP和KDP要好的多了。
4 利用PHIDP进行dBZ和ZDR修正
4.1 计算方法
这里的计算就很简单了。
主要代码如下:
=+PHIDP*;
=+PHIDP*;
在该程序中,和分别是dBZ和ZDR相对于PHIDP的修正系数,见有关论文。
该系数和雷达波段有关。
我们先直接选用国外的研究成果,以后再研究更加准确的系数值。
下面以两组回波为例,展示一下处理的效果。
更多的处理效果,直接用以下Matlab程序,进行计算吧:
4.2 NJU..,仰角=度的计算结果
4.2.1 PHIDP处理前后的对比
图41雷达信号处理器直接给出的PHIDP结果
图42经过初相修正、数据剔除、去折叠、平滑滤波之后的PHIDP结果
从上面两张图对比可以看出,经过初始相位修正、数据剔除、去折叠、平滑滤波之后的PHIDP的数据质量,要远远好于雷达信号处理器直接给出的PHIDP结果。
4.2.2 dBZ修正前后对比
图43雷达信号处理器直接给出的dBZ结果
图44经过PHIDP订正之后的dBZ结果
4.2.3 ZDR修正前后对比
图45雷达信号处理器直接给出的ZDR结果
图46经过PHIDP订正之后的ZDR结果
4.2.4 RVP9给出的KDP和重新计算的KDP对比
图47RVP9给出的KDP结果
图48从PHIDP重新计算的KDP结果
下面我们对方位为298度的PHIDP和KDP结果绘制A显如下,可以更明显的看出两者的差异:
图49方位为298度的PHIDP的值
图410方位为298度的两种KDP结果的对比
注意:
这个偏差的原因很简单:
RVP9处理器给出的KDP是单程的,而Matlab计算的KDP是双程的。
单程的KDP是双程的1/2。
4.3 NJU..,仰角=度的计算结果
4.3.1 PHIDP处理前后的对比
图411雷达信号处理器直接给出的PHIDP结果
图412经过初相修正、数据剔除、去折叠、平滑滤波之后的PHIDP结果
4.3.2 dBZ修正前后对比
图413雷达信号处理器直接给出的dBZ结果
图414经过PHIDP订正之后的dBZ结果
4.3.3 ZDR修正前后对比
图415雷达信号处理器直接给出的ZDR结果
图416经过PHIDP订正之后的ZDR结果
4.3.4 RVP9给出的KDP和重新计算的KDP对比
图417RVP9给出的KDP结果
图418从PHIDP重新计算的KDP结果
5 总结
5.1 基于PHIDP修正ZDR和PHIDP很重要,否则dBZ和ZDR的结果会有很大的偏差
5.2 由于雷达采用接收机恒温技术,自身的PHIDP比较稳定,因此可以在进行体扫的时候,利用垂直90度观测的数据(如果有合适的降水回波数据的话),来进行初始值的计算,不需要每个径向上都进行初始值的统计
5.3 通过垂直90度的回波计算的PHIDP初始值非常精确,不受四周地物等的影响
5.4 通过对PHIDP进行精心的处理(剔除异常值、去折叠、自适应的平滑滤波等),可以很好的去除PHIDP受地物等非降水回波的影响,并能大大降低PHIDP的随机误差
5.5 根据PHIDP,重新计算的KDP,看起来效果比RVP9信号处理器给出的KDP值,要好得多。
接下来终于可以用KDP的值进行定量降水的研究了。
6 下一步工作
6.1 将上面的一整套处理方法,全面应用到该雷达至今所观测到的所有回波数据之中,进行全面的验证,主要是要看对于各个不同情况的回波,算法不能出现错误或奇异的结果。
Matlab程序为:
计算后生成的PHIDP、dBZ、ZDR、KDP的图片,保存在“xxx_New”目录下。
6.2 根据PHIDP订正之后的dBZ、ZDR,和S波段的雷达进行对比
6.3 重新计算得到的KDP,和雨量计进行对比
6.4 从IQ层面,开展对地物等非气象回波的研究,看能否找到更加合理、科学的剔除异常PHIDP的准则
 升级会员
升级会员 