伺服驱动器参数设置步骤.docx
《伺服驱动器参数设置步骤.docx》由会员分享,可在线阅读,更多相关《伺服驱动器参数设置步骤.docx(23页珍藏版)》请在冰豆网上搜索。
伺服驱动器参数设置步骤
伺服驱动器参数
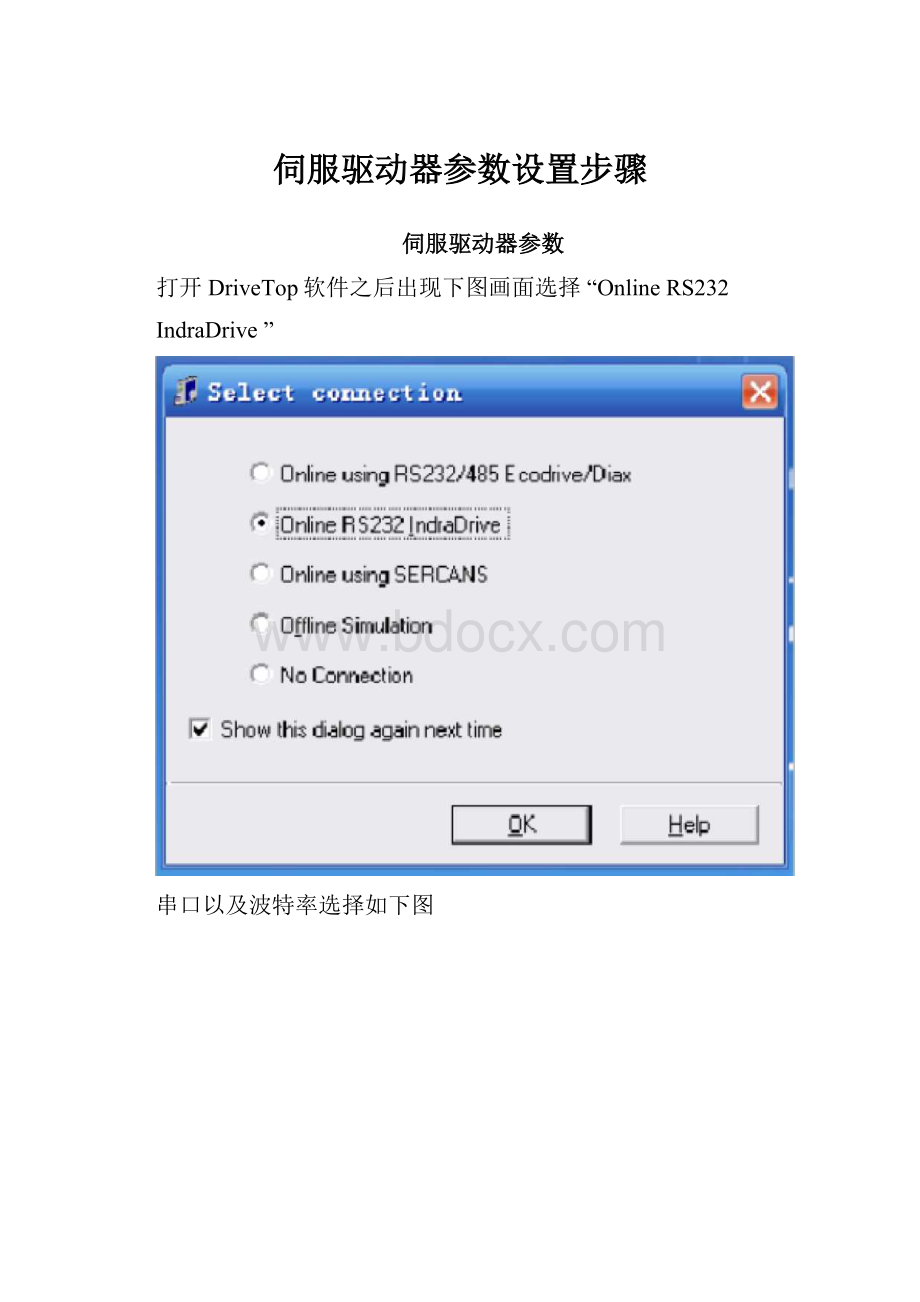
打开DriveTop软件之后出现下图画面选择“OnlineRS232
IndraDrive”
串口以及波特率选择如下图
参数设定首先进入“Operatingmodeselecting”菜单“Primary
operationmode”一栏选择“velocitycontrol”最后点击Next就可以进入以下参数设置画面
畀Signalstatusvprd-Drive5,Anvendungsart
Stalejigrul^atus^oid
Souicepaianeta
眺比.
Hit
Ex
>
■g
Ne一
--
MAD160-C-0150-SA-S2-K-G-0-35-N1发动机型号
Temperaturesensor:
KTY84
畀Sealing/units-Drive5,Anvendungsart
lypectjcalirg
广linear(tranjlator^j'
f*rOta'y
厂nonunifern
Hooolubon
Ntgalimofptiition,veloci^andtorqueifacedata
Cyes
no
「nonuniforn
IEkiIIH.*lp
2500Rpm需要设置
Ramp2pitch:
150rad/s与Decelerationramp2:
150rad/s
需要设置
畀SepondaryaperatipnBode1-Dpi^e5,Ans3rt
DrivecontroledpOsiticning/tfelativednvetanlr.nterpdatiort.eftc.1.lagless
Fosituringvabcily
Posit»ringacceleraton
Positioiingdecelefaton
f?
Drivecontrol-Drive5.,AurexidmiEsaxt
Modedmotorcontrcl
柠Field-onarttedclosed-leapcontrol
「U/fopenlooponttol厂FielAfie^edepfirHxpcxir^al
Torque4orce/curientlimrts
Leaddefaultcontrolerpar^m?
tai:
Pautornat匚loadrigcfdefaultcortrtjlerparameterswhenclearingenuinca;emotor隔$peplaced
'Rack|理mut、|Exil|H.elp
ControlloapjCentralloopmcnitnring
Veloci^conticlhopnronilorhg
存active
Cnotactive
Pusiiuriloopmcnituiirij
CloseIHelpI
EcivpHaltations;torque/forcesndcurrent1iwit?
EfActive-orque/force:
orirnaridv^luerorqMe-generatinscurrent,commandvalue
Velocity
looc
0.0究01Z2盘胡
Actvalueborquefanilpot.(stale)
Act.valuetorqueknitneq.(stalic]
Actualvaliepwktorquelimit
111C%
Activepe^kcifiantU3.933Aett
MaocimiLinipassivecontinuoLiscurrent94999Aeff
£3Tprque/fflrces
Acc&lffatbnfeedfouward
u
Actvalu»kwquBimitjas.stctid
Aclvalufttorqueimilneg.staticI
Acbalvoluepeaktoiquslimit
'Cbse''Ihelp
Torque/forcelimitvaluepositive:
400%
Torque/forcelimitvaluenegative:
-400%
Torque/forcepeaklimit:
400%
Bipolartorque/forcelimitvalue:
400%
需设置
Ciirreit+]~i~t
Tempeiaomodelamplilier
Amplifierpeakcument
Amplifiernominalcurren*
AmpliFierienripeiiatLir&
ThernnaldriveIBad
□vorluadwoniiiy
Torque4cr«
I咼
>Min-*■
Minr
IdCommand
Stallcurienllimit
u
Iq-Ccmmand
FIumloop
Activepeakcurrerit"I曲9.的9Aeff
Maximumposstlecontriuouscurerit34.339Aeff
jrlotnrcontrol
lx
IdertNonamevalue
S-0-010GCunentloopciroportionalaain12BQ
A
S-0-0107Cuirentloopintegralactiontime1
S-0^0380DCbusvoltagt
P-0-0001SwitchingfrequencyofthepoweioutputsldgeP-0-0043Toique-genefatingcurrent,,^clualvalu&
P-0-0044Flin-ganaralrycurrentactualvalue
P00045Controlwordofcurrentconkolter
F'00046St^uswordofcurrentcontrollef
P-D^528FluxcontrolloopproportKinalgain
P-0^0529Scalingofstallcurrentlimit
15
561.S
^000
0.207
•j吕&胡
oooo.oooo.oooo<..oooo.oooo.oooo.a..
&31
100
1m
IsKI:
:
mVHAA
Sorting
_ieaich_|
aidenlnumbefs
广name$
Change
Close|del?
|
$7drivehal±-DriveAnvendimf:
sart
Lookindialog1'Staur$messigns''
hCKt>
WJ
Help
r^'Wt
DriveHaltaccelerationbipolar:
800rad/s
Standstillwindow:
5Rpm
畀Errorreacti(rn.jsupplynodule-Drive5,AiweTidiLngsart
ModulBqroup
Ccniiclvjo-dDCbusvoltageOK
SlalutwoxlDCbkt?
volt^fleOK
F^ickar^rftflc'icn
PRMcbontoerrjrirtmiddle^roup
PI'^gerirgotpackagereactionon&rrar
OCbusiindervoltage
I<•UrKjeivgfcajeasrton-fataleror
厂Undm卅出日ge渺ncn-fatalearning
厂Drivsclearsernr-dacno^is.feriaUasignaliscancelled
Eignalirgfataldriveerrors(F&.]忙thepowersupplymodule
f*Nosignaling
广R»vef$¥曲modulesvAchegpoweroffandactivatestheDCbusshortcicuitifrealizedonhardwareside
亡M.E毬Z]Nert>IExitIHelp
亡M.E毬Z]Nert>IExitIHelp
畀Encoderevulat±on-Drive5.Anrexidiuifsart
EncodetemiiaticNn
介Emulationofihcre-mentalercoder
广Emulatbriofcbsolutt?
ericodei
「Moeinuhtion
□utpul:
ofsignal
SigndJtdsctien
Resolutionofencoderemulat:
2048Counts/Rev
Makerpulseoffset:
0CountsMakerpulsedistance:
2048
Counts
Tusi-tipTi?
vitchpoint1-Drive5,tnvendung3art
Signal
'RackI理mut、IExil|H.elp
CA.J>kirK4L
注:
此软件为翻页就会保存修改数据,未提到的参数为默认制值
 升级会员
升级会员 