机器视觉检测的分析简答作业与答案.docx
《机器视觉检测的分析简答作业与答案.docx》由会员分享,可在线阅读,更多相关《机器视觉检测的分析简答作业与答案.docx(10页珍藏版)》请在冰豆网上搜索。
机器视觉检测的分析简答作业与答案
2012研究生机器视觉课程检测及课程设计内容
一、回答下列问题:
1、什么是机器视觉,它的目标是什么?
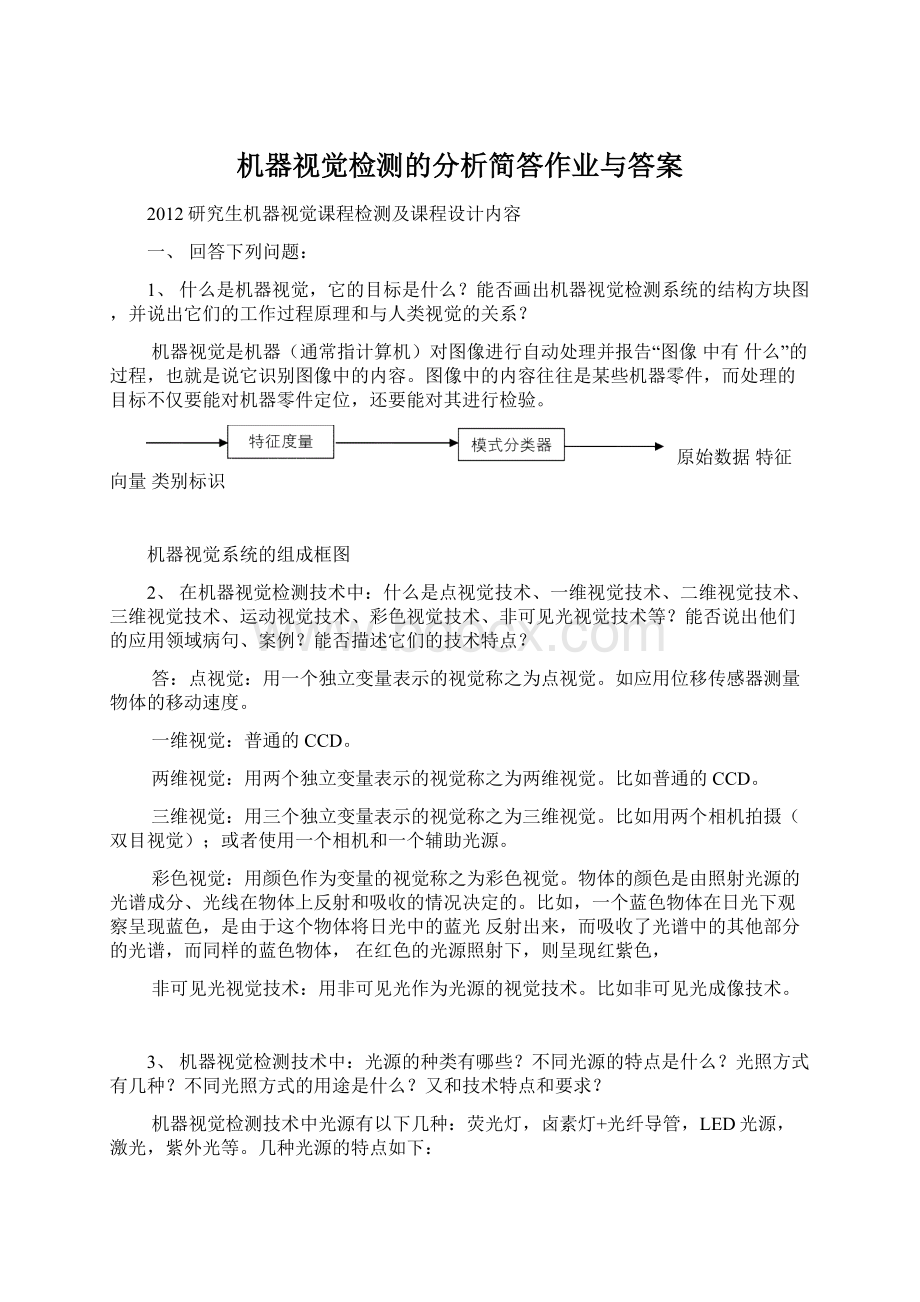
能否画出机器视觉检测系统的结构方块图,并说出它们的工作过程原理和与人类视觉的关系?
机器视觉是机器(通常指计算机)对图像进行自动处理并报告“图像中有什么”的过程,也就是说它识别图像中的内容。
图像中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。
原始数据特征向量类别标识
机器视觉系统的组成框图
2、在机器视觉检测技术中:
什么是点视觉技术、一维视觉技术、二维视觉技术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等?
能否说出他们的应用领域病句、案例?
能否描述它们的技术特点?
答:
点视觉:
用一个独立变量表示的视觉称之为点视觉。
如应用位移传感器测量物体的移动速度。
一维视觉:
普通的CCD。
两维视觉:
用两个独立变量表示的视觉称之为两维视觉。
比如普通的CCD。
三维视觉:
用三个独立变量表示的视觉称之为三维视觉。
比如用两个相机拍摄(双目视觉);或者使用一个相机和一个辅助光源。
彩色视觉:
用颜色作为变量的视觉称之为彩色视觉。
物体的颜色是由照射光源的光谱成分、光线在物体上反射和吸收的情况决定的。
比如,一个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光反射出来,而吸收了光谱中的其他部分的光谱,而同样的蓝色物体,在红色的光源照射下,则呈现红紫色,
非可见光视觉技术:
用非可见光作为光源的视觉技术。
比如非可见光成像技术。
3、机器视觉检测技术中:
光源的种类有哪些?
不同光源的特点是什么?
光照方式有几种?
不同光照方式的用途是什么?
又和技术特点和要求?
机器视觉检测技术中光源有以下几种:
荧光灯,卤素灯+光纤导管,LED光源,激光,紫外光等。
几种光源的特点如下:
种类名称
成本
亮度
稳定度
使用寿命
复杂设计
温度影响
荧光灯
低
差
差
一般
低
一般
卤素灯+光纤导管
高
好
一般
差
一般
差
LED光源
一般
一般
好
好
高
低
光照方式有以下几种:
背景光法(背光照射)是将被测物置于相机和光源之间。
这种照明方式的优点是可将被测物的边缘轮廓清晰地勾勒出来。
由于在图像中,被测物所遮挡的部分为黑色,而未遮挡的部分为白色,因此形成“黑白分明”的易于系统分析的图像。
此方法被应用于90%的测量系统中。
前景光法(正面照射)是将灯源置于被测物和相机之前。
又可分为明场照射和暗场照射。
明场照射是为了获得物体的几乎全部信息,照射物体的光在视野范围之内几乎全部反射回去;暗场照射是为了获取物体表面的凹凸,照射物体的光在视野范围之外有部分光反射回去。
同轴光法是将灯源置于被测物和相机之间。
4、机器视觉检测系统中,光学系统的作用是什么?
光学器件有哪几种,它们各自的作用是什么?
光学镜头有几种类型,它们各自有何用途?
光学镜头有哪些技术参数,各自对测量有什么影响?
答:
机器视觉检测系统中,光学系统用来采集物体的轮廓、色彩等信息。
光学器件主要有:
镜头、成像器件(CCD和CMOS)、光圈、快门等。
镜头的作用是对成像光线进行调焦等处理,使成像更清晰;成像器件的作用是将光学图像转换成模拟电信号;光圈的作用如同人得瞳孔,控制入射光的入射量,实现曝光平衡;快门的作用是将想要获取的光学图像照射在成像器件上,获取想要的光学图像,排除干涉等。
光学镜头的类型:
标准镜头、广角镜头、远摄镜头、鱼眼镜头、反射式镜头、变焦镜头和特殊镜头等。
标准镜头的作用是获取和人眼观看效果类同的图像;广角镜头的作用是近距离拍摄较大场景的图像;远摄镜头的作用是远距离摄取景物的较大影象,对拍摄不易接近的物体,如动物、风光、人的自然神态,均能在远处不被干扰的情况下拍摄;鱼眼镜头的作用是近距离拍摄更大场景的图像;反射式镜头的作用是更远距离摄取物体图像;变焦镜头的作用是在不改变拍摄距离的情况下,能够在较大幅度内调节底片的成像比例。
光学镜头的技术参数有分辨率,失真,透光,暗角盲区。
5、光电转换器件CCD和CMOS的作用是什么?
各自的工作原理是什么,它们的差别是什么?
它们有哪些主要的技术参数,其作用是什么?
光电转换器件CCD和CMOS的作用是作为半导体光敏元件把光信号转换为电信号。
CCD(Charge—CoupledDemce)电路耦合器件的工作原理:
CCD电路耦合器分三个阶段采集图像信号,首先将光信号转换为电信号,然后暂时存放在CMOS存储器中,最后用时钟脉冲顺序读出信号。
CMOS(ComplementMetalOxideSemiconuctor)是互补金属氧化物场效应的简称,其工作原理为:
CMOS传感器中每一个感光元件都直接整合了放大器和模数转换逻辑,当感光二极管接受光照、产生模拟的电信号之后,电信号首先被该感光元件中的放大器放大,然后直接转换成对应的数字信号。
换句话说,在CMOS传感器中,每一个感光元件都可产生最终的数字输出,所得数字信号合并之后被直接送交DSP芯片处理。
从技术角度来讲二者的主要区别如下:
(a)信息读取方式不同;(b)速度有所差别;(c)电源及耗电量;(d)成像质量
CCD和CMOS主要参数:
CCD或CMOS尺寸、CCD或CMOS像素、水平分辨率、最小照度,也称为灵敏度、扫描制式、摄像机电源、信噪比、视频输出接口、镜头安装方式。
6、机器视觉检测技术中,图像处理的中心任务是什么?
什么是图像预处理,能否说出几种与处理的方法和算法?
边缘检测和边缘提取有何区别?
图像分割有几种方法?
如何理解图像处理中的卷积?
能否描述空间域处理和变换域处理的方法和用途?
机器视觉检测技术中,图像处理的中心任务是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配和识别的可靠性。
图像预处理即在图像分析中,对输入图像进行特征抽取、分割和匹配前所进行的处理。
是将每一个文字图像分检出来交给识别模块识别的这一过程。
边缘检测使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。
边缘提取是要保留图像弧度变化比较剧烈的区域,从数学上最直观的方法就是微分(对于数字图像来说就是差分),在信号处理的角度来看,也可以说是高通滤波器,即保留高频信号。
图象分割有三种不同的方法,其一是将各象素划归到相应物体或区域的象素聚类方法即区域法,其二是通过直接确定区域间的边界来实现分割的边界方法,其三是首先检测边缘象素再将边缘象素连接起来构成边界形成分割。
图像分割主要包括4种技术:
并行边界分割技术、串行边界分割技术、并行区域分割技术和串行区域分割技术。
图像处理中的卷积就是定义图像是f(x),模板是g(x),然后将模版g(x)在图像中移动,每到一个位置,就把f(x)与g(x)的定义域相交的元素进行乘积并且求和,得出新的图像一点(通常是灰度值),把新得到的像素集合起来就是卷积后的图像。
空间域是指图像本身,空间域图像处理的方法是直接对图像的像素进行处理,主要是亮度(灰度级)变换和空间滤波两种方法。
7、机器视觉算法中,你能说出几种与检测有关的方法,能否实践一种算法用于机器视觉检测(如:
各阶矩的应用等)?
有Canny边缘检测方法,差分边缘检测法,roberts边缘检测法,prewitt边缘检测法,laplace边缘检测法,log边缘检测法等算法。
下面实现一种基于c++软件语言的程序算法:
HDIBSUSANEdgeDetectDIB(HDIBhDib){
SetCursor(LoadCursor(NULL,IDC_WAIT));
DWORDdwDataLength=GlobalSize(hDib);
HDIBhNewDib=GlobalAlloc(GHND,dwDataLength);
if(!
hNewDib){
SetCursor(LoadCursor(NULL,IDC_ARROW));
returnNULL;
}
LPBYTElpDIB=(LPBYTE)GlobalLock(hNewDib);
if(lpDIB==NULL){
SetCursor(LoadCursor(NULL,IDC_ARROW));
returnNULL;
}
LPBYTElpDIBSrc=(LPBYTE)GlobalLock(hDib);
memcpy(lpDIB,lpDIBSrc,
sizeof(BITMAPINFOHEADER)+PaletteSize(lpDIBSrc));
DWORDlSrcWidth=DIBWidth(lpDIBSrc);
DWORDlSrcHeight=DIBHeight(lpDIBSrc);
WORDwBitCount=((LPBITMAPINFOHEADER)lpDIBSrc)->biBitCount;
DWORDlSrcRowBytes=WIDTHBYTES(lSrcWidth*((DWORD)wBitCount));
LPBYTElpOldBits=FindDIBBits(lpDIBSrc);
LPBYTElpData=FindDIBBits(lpDIB);
//图像变换开始//////////////////////////////////////////
DWORDi,j,h,k,offset;
intNearPoint[37];
intOffSetX[37]={-1,0,1,
-2,-1,0,1,2,
-3,-2,-1,0,1,2,3,
-3,-2,-1,0,1,2,3,
-3,-2,-1,0,1,2,3,
-2,-1,0,1,2,
-1,0,1};
intOffSetY[37]={-3,-3,-3,
-2,-2,-2,-2,-2,
-1,-1,-1,-1,-1,-1,-1,
0,0,0,0,0,0,0,
1,1,1,1,1,1,1,
2,2,2,2,2,
3,3,3};
if(wBitCount==8){
intthre,same,max,min;
//统计象素亮度最大值和最小值
max=min=0;
for(i=0;ifor(j=0;joffset=lSrcRowBytes*i+j;
if(max<(int)(*(lpOldBits+offset)))
max=(int)(*(lpOldBits+offset));
if(min>(int)(*(lpOldBits+offset)))
min=(int)(*(lpOldBits+offset));
}
//相似度阈值为最大值和最小值差的1/10
thre=(max-min)/10;
for(i=3;ifor(j=3;j//统计圆形邻域内相似的点的个数
same=0;
for(h=0;h<37;h++)
NearPoint[h]=(int)(*(lpOldBits+lSrcRowBytes*(i+OffSetY[h])+(j+OffSetX[h])));
for(h=0;h<37;h++)
if(((int)abs(NearPoint[h]-NearPoint[18]))
 升级会员
升级会员 