自适应控制程序资料.docx
《自适应控制程序资料.docx》由会员分享,可在线阅读,更多相关《自适应控制程序资料.docx(39页珍藏版)》请在冰豆网上搜索。
自适应控制程序资料
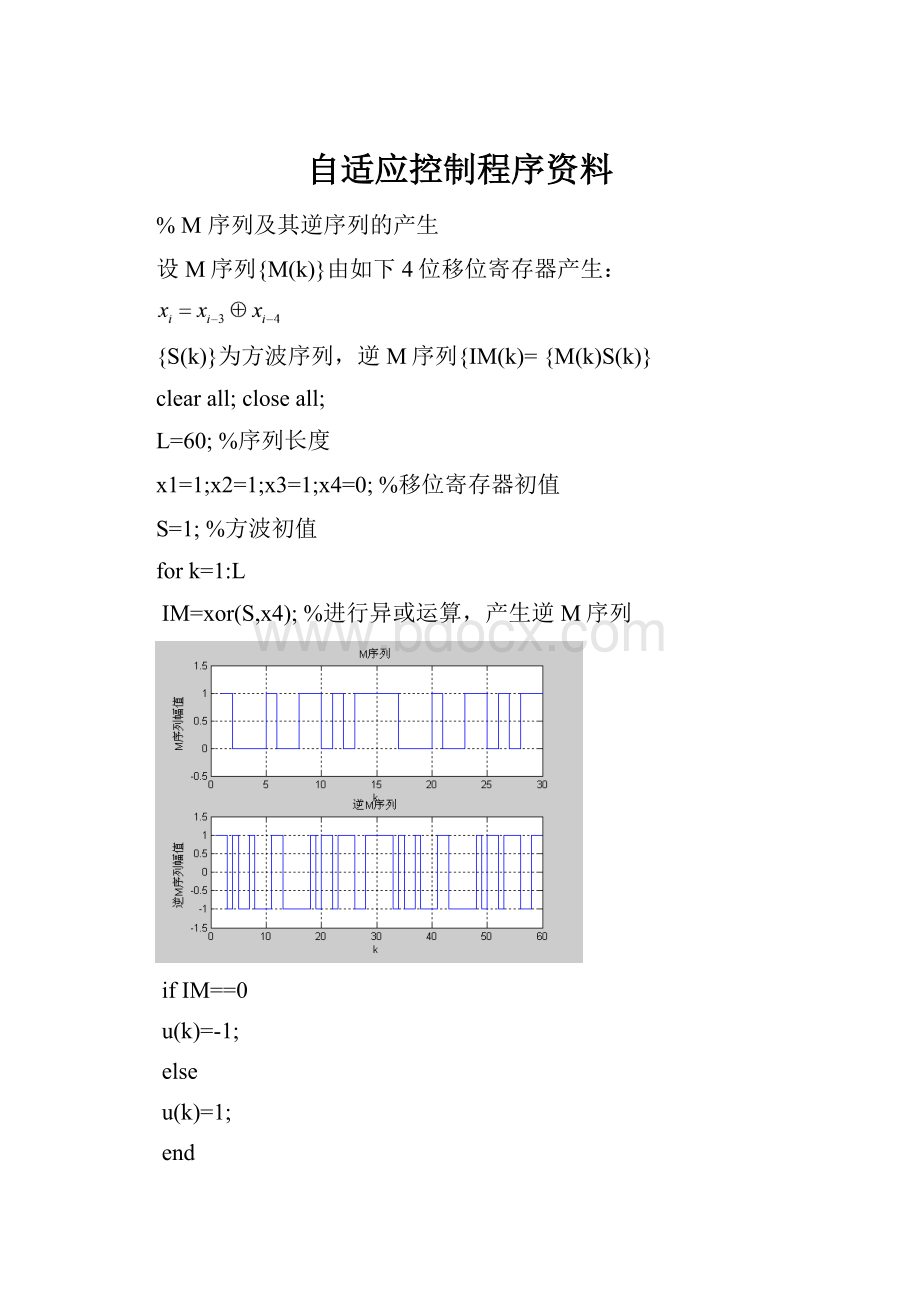
%M序列及其逆序列的产生
设M序列{M(k)}由如下4位移位寄存器产生:
{S(k)}为方波序列,逆M序列{IM(k)={M(k)S(k)}
clearall;closeall;
L=60;%序列长度
x1=1;x2=1;x3=1;x4=0;%移位寄存器初值
S=1;%方波初值
fork=1:
L
IM=xor(S,x4);%进行异或运算,产生逆M序列
ifIM==0
u(k)=-1;
else
u(k)=1;
end
S=not(S);%产生方波
M(k)=xor(x3,x4);%产生M序列
x4=x3;x3=x2;x2=x1;x1=M(k);%寄存器移位
end
subplot(2,1,1);
stairs(M);grid;
axis([0L/2-0.51.5]);xlabel('k');ylabel('M序列幅值');title('M序列');
subplot(2,1,2);
stairs(u);grid;
axis([0L-1.51.5]);xlabel('k');ylabel('逆M序列幅值');title('逆M序列');
%白噪声及有色噪声序列的产生
设(k)为均值为0,方差为1的高斯白噪声序列,e(k)为有色噪声序列:
高斯白噪声序列(k)在Matlab中由rand()函数产生,程序如下:
clearall;closeall;
L=500;%仿真长度
d=[1-1.50.70.1];c=[10.50.2];%分子分母多项式系数
nd=length(d)-1;nc=length(c)-1;%阶次
xik=zeros(nc,1);%白噪声初值
ek=zeros(nd,1);
xi=randn(L,1);%产生均值为0,方差为1的高斯白噪声序列
fork=1:
L
e(k)=-d(2:
nd+1)*ek+c*[xi(k);xik];%产生有色噪声
%数据更新
fori=nd:
-1:
2
ek(i)=ek(i-1);
end
ek
(1)=e(k);
fori=nc:
-1:
2
xik(i)=xik(i-1);
end
xik
(1)=xi(k);
end
subplot(2,1,1);
plot(xi);
xlabel('k');ylabel('噪声幅值');title('白噪声序列');
subplot(2,1,2);
plot(e);
xlabel('k');ylabel('噪声幅值');title('有色噪声序列');
%批处理最小二乘参数估计(LS)
考虑如下系统:
式中(k)为方差为1的白噪声。
clearall;
a=[1-1.50.7]';b=[10.5]';d=3;%对象参数
na=length(a)-1;nb=length(b)-1;%计算阶次
L=500;%数据长度
uk=zeros(d+nb,1);yk=zeros(na,1);%输入初值
x1=1;x2=1;x3=1;x4=0;S=1;%移位寄存器初值,方波初值
xi=rand(L,1);%白噪声序列
theta=[a(2:
na+1);b];%对象参数真值
fork=1:
L
phi(k,:
)=[-yk;uk(d:
d+nb)]';%phi(k,:
)为行向量,便于组成phi矩阵
y(k)=phi(k,:
)*theta+xi(k);%采集输出数据
IM=xor(S,x4);
ifIM==0
u(k)=-1;
else
u(k)=1;
end
S=not(S);M=xor(x3,x4);%产生M序列
%更新数据
x4=x3;x3=x2;x2=x1;x1=M;
fori=nb+d:
-1:
2
uk(i)=uk(i-1);
end
uk
(1)=u(k);
fori=na:
-1:
2
yk(i)=yk(i-1);
end
yk
(1)=y(k);
end
thetaevaluation=inv(phi'*phi)*phi'*y'%计算参数估计值
thetaevaluation=
-1.5362
0.6802
1.0068
0.4864
%遗忘因子递推最小二乘参数估计(FFRLS)
考虑如下系统:
式中(k)为均值为0、方差为0.1的白噪声,
对象时变参数
为:
取遗忘因子=0.98,
clearall;closeall;
a=[1-1.50.7]';b=[10.5]';d=3;%对象参数
na=length(a)-1;nb=length(b)-1;%计算阶次
L=1000;%数据长度
uk=zeros(d+nb,1);yk=zeros(na,1);%输入输出初值
u=randn(L,1);%输入采用方差为1的白噪声序列
xi=sqrt(0.1)*randn(L,1);%方差为0.1的白噪声干扰序列
%theta=[a(2:
na+1);b];%对象参数真值
thetae_1=zeros(na+nb+1,1);%参数初值
P=10^6*eye(na+nb+1);
lambda=0.98;%遗忘因子范围[0.91]
fork=1:
L
ifk==501
a=[1-10.4]';b=[1.50.2]';%对象参数突变
end
theta(:
k)=[a(2:
na+1);b];%对象参数真值
phi=[-yk;uk(d:
d+nb)];
y(k)=phi'*theta(:
k)+xi(k);%采样输出数据
%遗忘因子递推最小二乘公式
K=P*phi/(lambda+phi'*P*phi);
thetae(:
k)=thetae_1+K*(y(k)-phi'*thetae_1);
P=(eye(na+nb+1)-K*phi')*P/lambda;
%更新数据
thetae_1=thetae(:
k);
fori=d+nb:
-1:
2
uk(i)=uk(i-1);
end
uk
(1)=u(k);
fori=na:
-1:
2
yk(i)=yk(i-1);
end
yk
(1)=y(k);
end
subplot(2,1,1);
plot([1:
L],thetae(1:
na,:
));holdon;plot([1:
L],theta(1:
na,:
),'k:
');
xlabel('k');ylabel('参数估计a');
legend('a_1','a_2');axis([0L-22]);
subplot(2,1,2);
plot([1:
L],thetae(na+1:
na+nb+1,:
));holdon;plot([1:
L],theta(na+1:
na+nb+1,:
),'k:
');
xlabel('k');ylabel('参数估计b');
legend('b_0','b_1');axis([0L-0.52]);
%增广递推最小二乘参数估计(ERLS)
考虑如下系统:
式中(k)为方差为0.1的白噪声。
选择方差为1的白噪声作为输入信号u(k).
clearall;closeall;
a=[1-1.50.7]';b=[10.5]';c=[1-10.2]';d=3;%对象参数
na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%计算阶次
L=1000;%数据长度
uk=zeros(d+nb,1);yk=zeros(na,1);%输入输出初值
xik=zeros(nc,1);%噪声初值
xiek=zeros(nc,1);%噪声估计初值
u=randn(L,1);%输入采用方差为1的白噪声序列
xi=sqrt(0.1)*randn(L,1);%方差为0.1的白噪声干扰序列
theta=[a(2:
na+1);b;c(2:
nc+1)];%对象参数真值
thetae_1=zeros(na+nb+1+nc,1);%参数初值,na+nb+1+nc为辨识参数个数
P=10^6*eye(na+nb+1+nc);
lambda=0.98;%遗忘因子范围[0.91]
fork=1:
L
phi=[-yk;uk(d:
d+nb);xik];%测量向量
y(k)=phi'*theta+xi(k);%采样输出数据
phie=[-yk;uk(d:
d+nb);xiek];%估计的测量向量
%增广递推最小二乘公式
K=P*phie/(1+phie'*P*phie);
thetae(:
k)=thetae_1+K*(y(k)-phie'*thetae_1);
P=(eye(na+nb+1+nc)-K*phie')*P;
xie=y(k)-phie'*thetae(:
k);%白噪声估计值
%更新数据
thetae_1=thetae(:
k);
fori=d+nb:
-1:
2
uk(i)=uk(i-1);
end
uk
(1)=u(k);
fori=na:
-1:
2
yk(i)=yk(i-1);
end
yk
(1)=y(k);
fori=nc:
-1:
2
xik(i)=xik(i-1);
xiek(i)=xiek(i-1);
end
xik
(1)=xi(k);
xiek
(1)=xie;
end
figure
(1)
plot([1:
L],thetae(1:
na,:
));
xlabel('k');ylabel('参数估计a');
legend('a_1','a_2');axis([0L-22]);
figure
(2)
plot([1:
L],thetae(na+1:
na+nb+1,:
));
xlabel('k');ylabel('参数估计b');
legend('b_0','b_1');axis([0L01.5]);
figure(3)
plot([1:
L],thetae(na+nb+2:
na+nb+nc+1,:
));
xlabel('k');ylabel('参数估计c');
legend('c_1','c_2');axis([0L-22]);
递推最小二乘参数估计(RLS)
考虑如下系统:
式中(k)为方差为0.1的白噪声。
clearall;closeall;
a=[1-1.50.7]';b=[10.5]';d=3;%对象参数
na=length(a)-1;nb=length(b)-1;%计算阶次,na=2,nb=1
L=500;%数据长度(仿真长度)
uk=zeros(d+nb,1);yk=zeros(na,1);%输入输出初值uk:
4x1,ykx1
u=randn(L,1);%输入采用方差为1的白噪声序列
xi=sqrt(0.1)*randn(L,1);%方差为0.1的白噪声干扰序列
theta=[a(2:
na+1);b];%对象参数真值theta=[-1.5,0.7;1,0.5]
thetae_1=zeros(na+nb+1,1);%参数初值为4x1的全零矩阵
P=10^6*eye(na+nb+1);
fork=1:
L
phi=[-yk;uk(d:
d+nb)];%此处phi为列向量4x1
y(k)=phi'*theta+xi(k);%采集输出数据
%递推公式
K=P*phi/(1+phi'*P*phi);
thetae(:
k)=thetae_1+K*(y(k)-phi'*thetae_1);
P=(eye(na+nb+1)-K*phi')*P;
%更新数据
thetae_1=thetae(:
k);
fori=d+nb:
-1:
2
uk(i)=uk(i-1);
end
uk
(1)=u(k);
fori=na:
-1:
2
yk(i)=yk(i-1);
end
yk
(1)=y(k);
end
plot([1:
L],thetae);%line([1:
L],[theta,theta]);
xlabel('k');ylabel('参数估计a,b');
legend('a_1','a_2','b_0','b_1');
axis([0L-22]);
%最小方差控制(MVC)
考虑如下系统:
式中(k)为方差为0.1的白噪声。
取期望输出yr(k)为幅值为10的方波信号。
clearall;closeall;
a=[1-1.70.7];b=[10.5];c=[10.2];d=4;%对象参数
na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%计算阶次
nh=nb+d-1;%nh为多项式H的阶次
L=400;
uk=zeros(d+nb,1);
yk=zeros(na,1);
yrk=zeros(nc,1);
xik=zeros(nc,1);
yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)];%期望输出
xi=sqrt(0.1)*randn(L,1);%方差为0.1的白噪声序列
[h,f,g]=singlediophantine(a,b,c,d);%求解单步Diophantine方程
fork=1:
L
time(k)=k;
y(k)=-a(2:
na+1)*yk+b*uk(d:
d+nb)+c*[xi(k);xik];%采集输出数据
u(k)=(-h(2:
nh+1)*uk(1:
nh)+c*[yr(k+d:
-1:
k+d-min(d,nc));yrk(1:
nc-d)]-g*[y(k);yk(1:
na-1)])/h
(1);%求控制量
%更新数据
fori=d+nb:
-1:
2
uk(i)=uk(i-1);
end
uk
(1)=u(k);
fori=na:
-1:
2
yk(i)=yk(i-1);
end
yk
(1)=y(k);
fori=nc:
-1:
2
yrk(i)=yrk(i-1);
xik(i)=xik(i-1);
end
ifnc>0
yrk
(1)=yr(k);
xik
(1)=xi(k);
end
end
subplot(2,1,1);
plot(time,yr(1:
L),'r:
',time,y);
xlabel('k');ylabel('y_r(k)、y(k)');
legend('y_r(k)','y(k)');
subplot(2,1,2);
plot(time,u);
xlabel('k');ylabel('u(k)');
单步Diophantine方程求解
求解下列系统的单步Diophantine方程:
(1)
(2)
(3)
%单步Diophantine方程的求解
clearall;
a=[1-1.50.7];b=[10.5];c=[1];d=3;%例4.1
(1)
%a=[1-0.95];b=[12];c=[1-0.7];d=2;%例4.1
(2)
%a=[1-1.70.7];b=[0.91];c=[12];d=4;%例4.1(3)
[e,f,g]=sindiophantine(a,b,c,d)%调用函数sindiophantine
function[e,f,g]=singlediophantine(a,b,c,d)%单步Diophantine方程求解
na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%计算阶次
ne=d-1;ng=na-1;%E,G的阶次
ad=[a,zeros(1,ng+ne+1-na)];cd=[c,zeros(1,ng+d-nc)];%令a(na+2)=a(na+3)=...=0
e
(1)=1;
fori=2:
ne+1
e(i)=0;
forj=2:
i
e(i)=e(i)+e(i+1-j)*ad(j);
end
e(i)=cd(i)-e(i);%计算ei
end
fori=1:
ng+1
g(i)=0;
forj=1:
ne+1
g(i)=g(i)+e(ne+2-1)*ad(i+j);
end
g(i)=cd(i+d)-g(i);%计算gi
end
f=conv(b,e);%计算F
e=
1.00001.50001.5500
f=
1.00002.00002.30000.7750
g=
1.2750-1.0850
多步Diophantine方程求解
求解如下系统的多步Diophantine方程,并去预测长度N=3
%多步Diophantine方程的求解
clearall;
a=[1-2.72.4-0.7];b=[0.91];c=[12];
na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%A、B、C的阶次
N=3;%预测步数
[E,F,G]=multidiophantine(a,b,c,N)%调用函数multidiophantine
function[E,F,G]=multidiophantine(a,b,c,N)
%********************************************************
%功能:
多步Diophanine方程的求解
%调用格式:
[E,F,G]=sindiophantine(a,b,c,N)(注:
d=1)
%输入参数:
多项式A、B、C系数向量及预测步数(共4个)
%输出参数:
Diophanine方程的解E、F、G(共3个)
%********************************************************
na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%A、B、C的阶次
%E、F、G的初值
E=zeros(N);E(1,1)=1;F(1,:
)=conv(b,E(1,:
));
ifna>=nc
G(1,:
)=[c(2:
nc+1)zeros(1,na-nc)]-a(2:
na+1);%令c(nc+2)=c(nc+3)=...=0
else
G(1,:
)=c(2:
nc+1)-[a(2:
na+1)zeros(1,nc-na)];%令a(na+2)=a(na+3)=...=0
end
%求E、G、F
forj=1:
N-1
fori=1:
j
E(j+1,i)=E(j,i);
end
E(j+1,j+1)=G(j,1);
fori=2:
na
G(j+1,i-1)=G(j,i)-G(j,1)*a(i);
end
G(j+1,na)=-G(j,1)*a(na+1);
F(j+1,:
)=conv(b,E(j+1,:
));
end
%最小方差自校正控制
用最小方差自校正控制算法对以下系统进行闭环控制:
式中(k)为方差为0.1的白噪声。
取期望输出yr(k)为幅值为10的方波信号。
%最小方差间接自校正控制
clearall;closeall;
a=[1-1.70.7];b=[10.5];c=[10.2];d=4;%对象参数
na=length(a)-1;nb=length(b)-1;nc=length(c)-1;%na、nb、nc为多项式A、B、C阶次
nf=nb+d-1;%nf为多项式F的阶次
L=400;%控制步数
uk=zeros(d+nb,1);%输入初值:
uk(i)表示u(k-i);
yk=zeros(na,1);%输出初值
yrk=zeros(nc,1);%期望输出初值
xik=zeros(nc,1);%白噪声初值
xiek=zeros(nc,1);%白噪声估计初值
yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)];%期望输出
xi=sqrt(0.1)*randn(L,1);%白噪声序列
%RELS初值设置
thetae_1=0.001*ones(na+nb+1+nc,1);%非常小的正数(这里不能为0)
P=10^6*eye(na+nb+1+nc);
fork=1:
L
time(k)=k;
y(k)=-a(2:
na+1)*yk+b*uk(d:
d+nb)+c*[xi(k);xik];%采集输出数据
%递推增广最小二乘法
phie=[-yk;uk(d:
d+nb);xiek];
K=P*phie/(1+phie'*P*phie);
thetae(:
k)=thetae_1+K*(y(k)-phie'*thetae_1);
P=(eye(na+nb+1+nc)-K*phie')*P;
xie=y(k)-phie'*thetae(:
k);%白噪声的估计值
%提取辨识参数
ae=[1thetae(1:
na,k)'];be=thetae(na+1:
na+nb+1,k)';ce=[1thetae(na+nb+2:
na+nb+1+nc,k)'];
ifabs(be
(2))>0.9
be
(2)=sign(ce
(2))*0.9;%MVC算法要求B稳定
end
ifabs(ce
(2))>0.9
ce
(2)=sign(ce
(2))*0.9;
end
[e,f,g]=sindiophantine(ae,be,ce,d);%求解单步Diophantine方程
u(k)=(-f(2:
nf+1)*uk(1:
nf)+ce*[yr(k+d:
-1:
k+d-min(d,nc));yrk(1:
nc-d)]-g*[y(k);yk(1:
na-1)])/f
(1);%求控制量
%更新数据
thetae_1=thetae(:
k);
fori=d+nb:
-1:
2
uk(i)=uk(i-1);
end
uk
(1)=u(k);
fori=na:
-1:
2
yk(i)=yk(i-1);
end
yk
(1)=y(k);
fori=nc:
-1:
2
yrk(i)=yrk(i-1);
xik(i)=xik(i-1);
xiek(i)=xiek(i-1);
end
ifnc>0
yrk
(1)=yr(k);
xik
(1)=xi(k);
xiek
(1)=xie;
end
end
figure
(1);
subplot(2,1,1);
plot(time,yr(1:
L),'r:
',time,y);
xlabel('k');ylabel('y_r(k)、y(k)');
legend('y_r(k)','y(k)
 升级会员
升级会员 