CT图像三维重建附源码.doc
《CT图像三维重建附源码.doc》由会员分享,可在线阅读,更多相关《CT图像三维重建附源码.doc(8页珍藏版)》请在冰豆网上搜索。
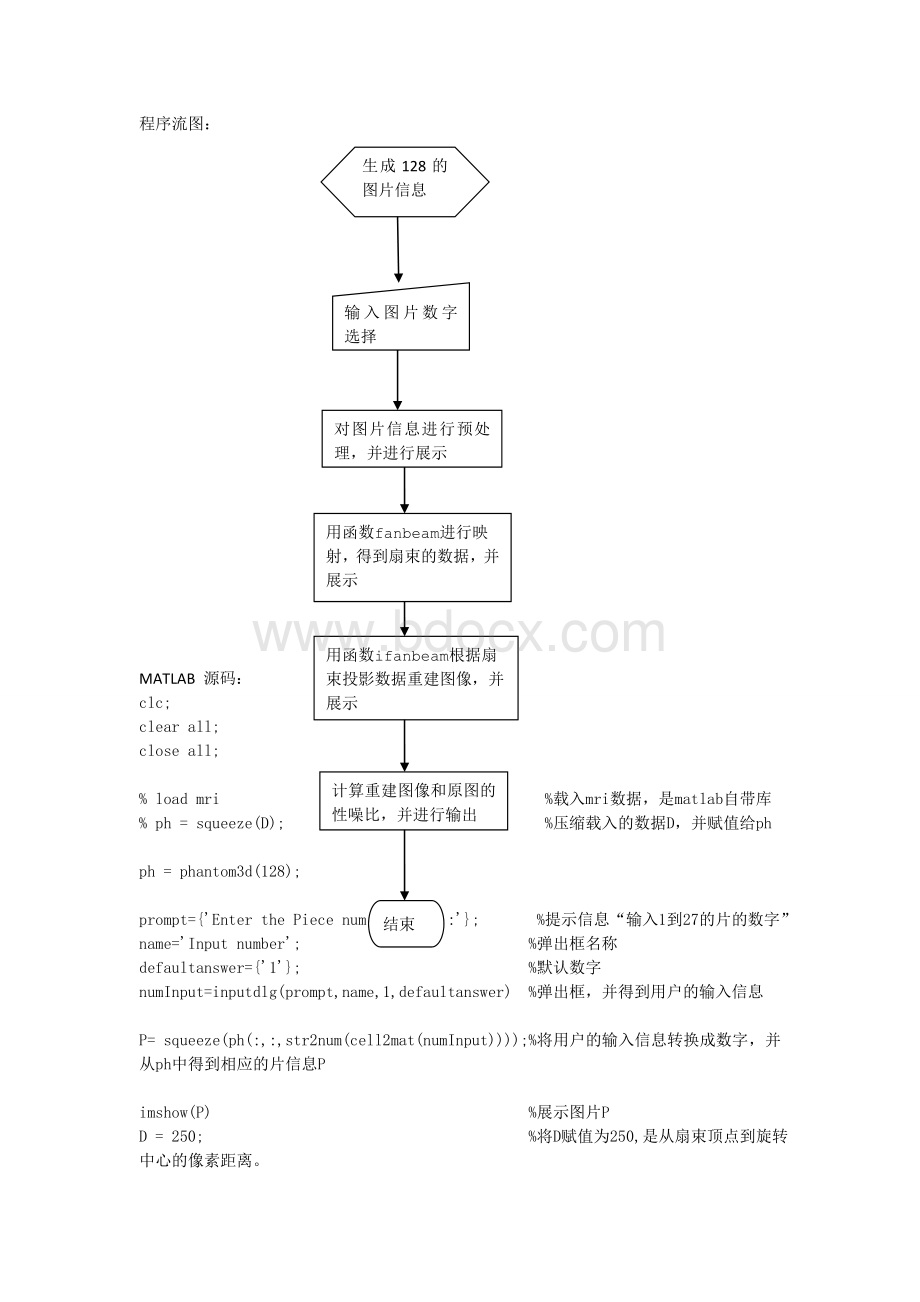
结束
计算重建图像和原图的性噪比,并进行输出
用函数ifanbeam根据扇束投影数据重建图像,并展示
用函数fanbeam进行映射,得到扇束的数据,并展示
对图片信息进行预处理,并进行展示
输入图片数字选择
生成128的图片信息
程序流图:
MATLAB源码:
clc;
clearall;
closeall;
%loadmri%载入mri数据,是matlab自带库
%ph=squeeze(D);%压缩载入的数据D,并赋值给ph
ph=phantom3d(128);
prompt={'EnterthePiecenum(1to128):
'};%提示信息“输入1到27的片的数字”
name='Inputnumber';%弹出框名称
defaultanswer={'1'};%默认数字
numInput=inputdlg(prompt,name,1,defaultanswer)%弹出框,并得到用户的输入信息
P=squeeze(ph(:
:
str2num(cell2mat(numInput))));%将用户的输入信息转换成数字,并从ph中得到相应的片信息P
imshow(P)%展示图片P
D=250;%将D赋值为250,是从扇束顶点到旋转中心的像素距离。
dsensor1=2;%正实数指定扇束传感器的间距2
F1=fanbeam(P,D,'FanSensorSpacing',dsensor1);%通过P,D等计算扇束的数据值
dsensor2=1;%正实数指定扇束传感器的间距1
F2=fanbeam(P,D,'FanSensorSpacing',dsensor2);%通过P,D等计算扇束的数据值
dsensor3=0.25%正实数指定扇束传感器的间距0.25
[F3,sensor_pos3,fan_rot_angles3]=fanbeam(P,D,...
'FanSensorSpacing',dsensor3);%通过P,D等计算扇束的数据值,并得到扇束传感器的位置sensor_pos3和旋转角度fan_rot_angles3
figure,%创建窗口
imagesc(fan_rot_angles3,sensor_pos3,F3)%根据计算出的位置和角度展示F3的图片
colormap(hot);%设置色图为hot
colorbar;%显示色栏
xlabel('FanRotationAngle(degrees)')%定义x坐标轴
ylabel('FanSensorPosition(degrees)')%定义y坐标轴
output_size=max(size(P));%得到P维数的最大值,并赋值给output_size
Ifan1=ifanbeam(F1,D,...
'FanSensorSpacing',dsensor1,'OutputSize',output_size);
%根据扇束投影数据F1及D等数据重建图像
figure,imshow(Ifan1)%创建窗口,并展示图片Ifan1
title('图一');
disp('图一和原图的性噪比为:
');
result=psnr1(Ifan1,P);
Ifan2=ifanbeam(F2,D,...
'FanSensorSpacing',dsensor2,'OutputSize',output_size);
%根据扇束投影数据F2及D等数据重建图像
figure,imshow(Ifan2)%创建窗口,并展示图片Ifan2
disp('图二和原图的性噪比为:
');
result=psnr1(Ifan2,P);
title('图二');
Ifan3=ifanbeam(F3,D,...
'FanSensorSpacing',dsensor3,'OutputSize',output_size);
%根据扇束投影数据F3及D等数据重建图像
figure,imshow(Ifan3)%创建窗口,并展示图片Ifan3
title('图三');
disp('图三和原图的性噪比为:
');
result=psnr1(Ifan3,P);
function[p,ellipse]=phantom3d(varargin)
%PHANTOM3DThree-dimensionalanalogueofMATLABShepp-Loganphantom
%P=PHANTOM3D(DEF,N)generatesa3Dheadphantomthatcan
%beusedtotest3-Dreconstructionalgorithms.
%
%DEFisastringthatspecifiesthetypeofheadphantomtogenerate.
%Validvaluesare:
%
%'Shepp-Logan'Atestimageusedwidelybyresearchersin
%tomography
%'ModifiedShepp-Logan'(default)AvariantoftheShepp-Loganphantom
%inwhichthecontrastisimprovedforbetter
%visualperception.
%
%NisascalarthatspecifiesthegridsizeofP.
%Ifyouomittheargument,Ndefaultsto64.
%
%P=PHANTOM3D(E,N)generatesauser-definedphantom,whereeachrow
%ofthematrixEspecifiesanellipsoidintheimage.Ehastencolumns,
%witheachcolumncontainingadifferentparameterfortheellipsoids:
%
%Column1:
Atheadditiveintensityvalueoftheellipsoid
%Column2:
athelengthofthexsemi-axisoftheellipsoid
%Column3:
bthelengthoftheysemi-axisoftheellipsoid
%Column4:
cthelengthofthezsemi-axisoftheellipsoid
%Column5:
x0thex-coordinateofthecenteroftheellipsoid
%Column6:
y0they-coordinateofthecenteroftheellipsoid
%Column7:
z0thez-coordinateofthecenteroftheellipsoid
%Column8:
phiphiEulerangle(indegrees)(rotationaboutz-axis)
%Column9:
thetathetaEulerangle(indegrees)(rotationaboutx-axis)
%Column10:
psipsiEulerangle(indegrees)(rotationaboutz-axis)
%
%Forpurposesofgeneratingthephantom,thedomainsforthex-,y-,and
%z-axesspan[-1,1].Columns2through7mustbespecifiedinterms
%ofthisrange.
%
%[P,E]=PHANTOM3D(...)returnsthematrixEusedtogeneratethephantom.
%
%ClassSupport
%-------------
%Allinputsmustbeofclassdouble.Alloutputsareofclassdouble.
%
%Remarks
%-------
%Foranygivenvoxelintheoutputimage,thevoxel'svalueisequaltothe
%sumoftheadditiveintensityvaluesofallellipsoidsthatthevoxelisa
%partof.Ifavoxelisn
 升级会员
升级会员 