自动控制原理复习资料 卢京潮版.docx
《自动控制原理复习资料 卢京潮版.docx》由会员分享,可在线阅读,更多相关《自动控制原理复习资料 卢京潮版.docx(29页珍藏版)》请在冰豆网上搜索。
自动控制原理复习资料卢京潮版
第二章:
控制系统的数学模型
§2.1引言
·系统数学模型-描述系统输入、输出及系统内部变量之间关系的数学表达式。
·建模方法
·本章所讲的模型形式
§2.2控制系统时域数学模型
1、线性元部件、系统微分方程的建立
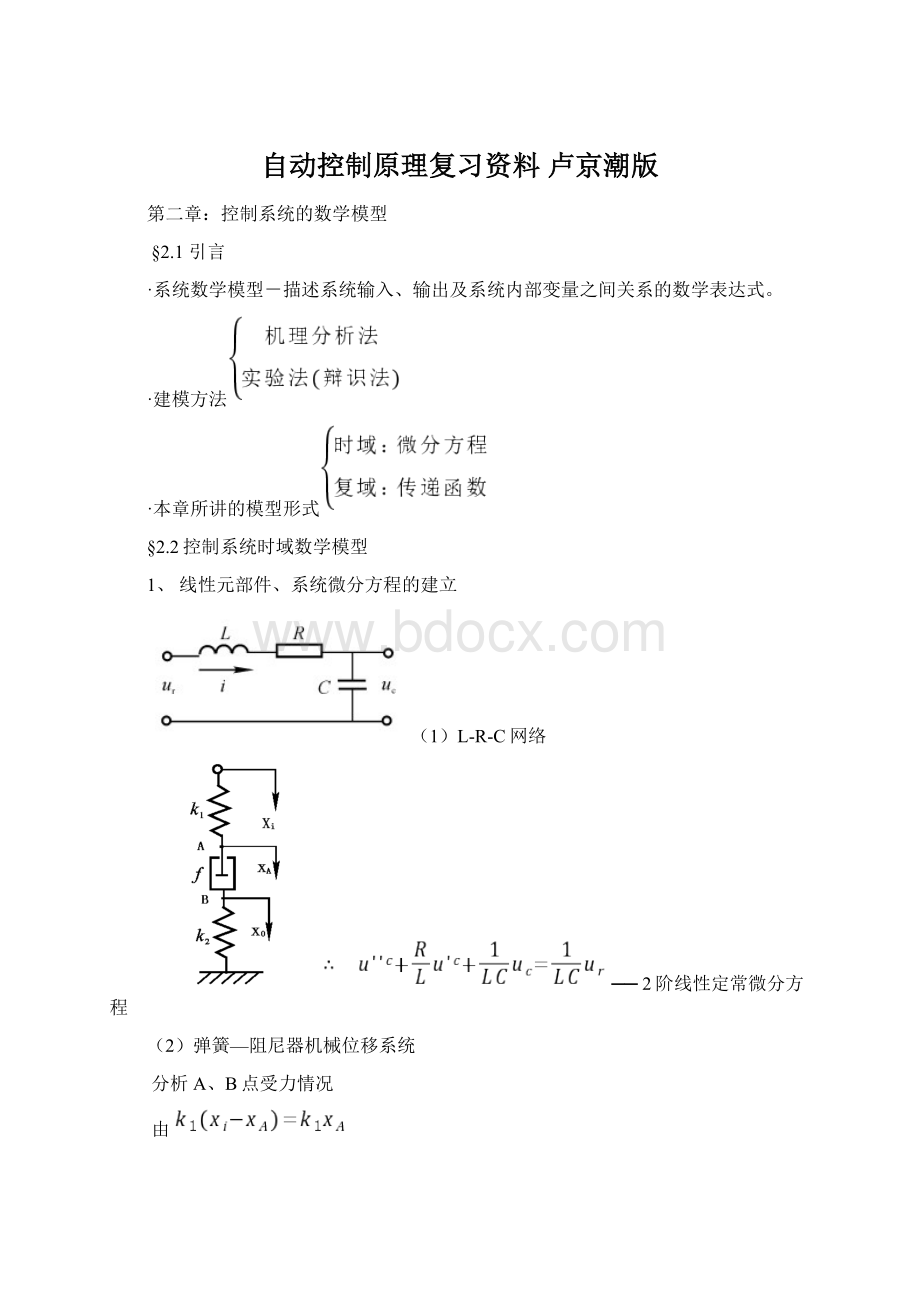
(1)L-R-C网络
──2阶线性定常微分方程
(2)弹簧—阻尼器机械位移系统
分析A、B点受力情况
由
解出
代入B等式:
得:
──一阶线性定常微分方程
(3)电枢控制式直流电动机
电枢回路:
┈克希霍夫
电枢及电势:
┈楞次
电磁力矩:
┈安培
力矩方程:
┈牛顿
变量关系:
消去中间变量有:
(4)X-Y记录仪(不加内电路)
消去中间变量得:
─二阶线性定常微分方程
即:
2、线性系统特性──满足齐次性、可加性
线性系统便于分析研究。
在实际工程问题中,应尽量将问题化到线性系统范围内研究。
非线性元部件微分方程的线性化。
例:
某元件输入输出关系如下,导出在工作点处的线性化增量方程
解:
在处线性化展开,只取线性项:
令
得
3、用拉氏变换解微分方程
(初条件为0)
复习拉普拉斯变换的有关内容
1复数有关概念
(1)复数、复函数
复数
复函数
例:
(2)复数模、相角
(3)复数的共轭
(4)解析:
若F(s)在s点的各阶导数都存在,称F(s)在s点解析。
2拉氏变换定义
3几种常见函数的拉氏变换
1.单位阶跃:
2.指数函数:
3.正弦函数:
4 拉氏变换的几个重要定理
(1)线性性质:
(2)微分定理:
零初始条件下有:
例1:
求
例2:
求
解:
(3)积分定理:
(证略)
零初始条件下有:
进一步有:
例3:
求L[t]=?
解:
例4:
求
解:
(4)位移定理
实位移定理:
例5:
解:
虚位移定理:
(证略)
例6:
求
例7:
例8:
(5)终值定理(极限确实存在时)
证明:
由微分定理
取极限:
∴有:
证毕
例9:
求
例10:
拉氏变换附加作业
一.已知f(t),求F(s)=?
二.已知F(s),求f(t)=?
5.拉氏反变换
(1)反变换公式:
(2)查表法——分解部分分式(留数法,待定系数法,试凑法)
微分方程一般形式:
的一般表达式为:
(I)
其中分母多项式可以分解因式为:
(II)
的根(特征根),分两种情形讨论:
I:
无重根时:
(依代数定理可以把表示为:
)
即:
若可以定出来,则可得解:
而计算公式:
(Ⅲ)
(Ⅲ′)
(说明(Ⅲ)的原理,推导(Ⅲ′))
●例2:
求
解:
●例3:
,求
解:
不是真分式,必须先分解:
(可以用长除法)
●例4:
解法一:
()
解法二:
II:
有重根时:
设为m阶重根,为单根.则可表示为:
其中单根的计算仍由
(1)中公式(Ⅲ)(Ⅲ′)来计算.
重根项系数的计算公式:
(说明原理)
●例5求
解:
3.用拉氏变换方法解微分方程
●例:
解:
举例说明拉氏变换的用途之一—解线性常微分方程,引出传函概念。
如右图RC电路:
初条件:
输入
依克西霍夫定律:
L变换:
依(*)式可见,影响CR电路响应的因素有三个:
分析系统时,为在统一条件下衡量其性能
输入都用阶跃,初条件影响不考虑
3:
系统的结构参数 ――只有此项决定系统性能
零初条件下输入/出拉氏变换之比(不随输入形式而变)
§2-3线性定常系统的传递函数——上述CR电路的结论适用于一般情况
一般情况下:
线性系统的微分方程:
简单讲一下:
传递函数的标准形式:
I:
为首1多项式型:
II:
为尾1多项式型:
开环增益的意义:
一般情况下:
首1型:
(1)
尾1型:
(2)
由
(1)式:
(3)
比较
(1)
(2):
(4)
首1型多用于根轨迹法中.
尾1型多用于时域法,频域法中.
一.传递函数定义:
条件:
定义:
有关概念:
特征式,特征方程,特征根
零点——使的s值
极点——使的s值
:
传递函数,增益,放大倍数→
结构图——系统的表示方法
G(s)分子分母与相应的微分方程之间的联系:
完全取决于系统本身的结构参数
注
(1)为何要规定零初始条件?
分析系统性能时,需要在统一条件下考查系统:
输入:
都用阶跃输入.
初条件:
都规定为零——为确定一个系统的起跑线而定.
则系统的性能只取决于系统本身的特性(结构参数)
(2)为何初条件可以为零?
1)我们研究系统的响应,都是从研究它的瞬时才把信号加上去的.
2)绝大多数系统,当输入为0时,都处于相对静止状态.
3)零初始条件是相对的,常可以以平衡点为基点(如小扰动为线性化时)
(3)零初条件的规定,并不妨碍非零初条件时系统全响应的求解.
可以由G(s)回到系统微分方程,加上初条件求解.
二.传递函数的性质:
1.G(s):
复函数,是自变量为s的有理真分式(m≤n)均为实常数.
m1).实际系统都存在惯性,从微分方程上反映出来,即C(s)的阶次比R(s)阶次高.反映到G(s)上即有分母阶次n≥分子阶次m.
2).反证法:
设m>n则:
说明:
2.G(s):
只与系统本身的结构参数有关与输入的具体形式无关.
输入变时,C(s)=G(s)R(s)变,但G(s)本身并不变化
但G(s)与输入、输出信号的选择有关.r(t),c(t)选择不同,G(s)不同.(见前CR电路.)
3.G(s)与系统的微分方程有直接联系
4.→G(s)是系统单位脉冲响应的拉氏变换
5.G(s)与系统相应的零极点分布图对应
G(s)的零极点均是复数,可在复平面上表示:
若不计传递函数,G(s)与其零极点分布图等价.
例:
G(s)系统零极点分布图系统性能
若当系统参数发生变化时,分析其特性:
1)用解微分方程法十分繁琐——一个元部件参数改变,影响,得反复解
2)若掌握了零极点分布与系统性能之间的规律性,则当某个元部件的参数改变时,变化,零极点位置变化,系统性能的变化规律就能掌握了,这样,我们可以有目的地改变某些参数,改善系统的性能,且免除了解微分方程的烦恼。
——这是为什么采用G(s)这种数模的原因之一。
三.采用传递函数的局限:
1.G(s)原则上不反映C(0)≠0时的系统的全部运动规律.(虽然由G(s)转到微分方程,可以考虑初条件的影响。
)
2.G(s)只适用于单输入,单输出系统。
3.G(s)只适用于线性定常系统——由于拉氏变换是一种线性变换.
例:
传递函数是古典控制理论中采用的数学模型形式,经常要用。
(典型元部件传递函数略讲,重点以伺服电机引出结构图的概念)
例1已知某系统,当输入为时,输出为
求:
1)系统传递函数
2)系统增益?
3)系统的特征根及相应的模态?
4)画出系统对应的零极点图;
5)系统的单位脉冲响应
6)系统微分方程;
7)当时,系统响应
解1)
①
2)由①式,增益K=1
3)由①式:
特征根模态
4)零极点图见右
5)
6)-隐含零初始条件
-不受零初始条件限制
7)对上式进行拉氏变换,注意代上初条件
例2系统如右图所示
已知方框对应的微分方程为
求系统的传递函数
解:
对相应的微分方程进行拉氏变换
①
又由运算放大器特性,有
②
①×②有
4.典型元部件的传递函数
1.电位器(无负载时)
2.电桥式误差角(位置)检测器
3.自整角机
注自整角机与电桥式误差检测器功能相同,只是有以下几点区别
1)前者工作于交流状态,后者直流
2)自整角机无摩擦,精度高
3)自整角机可以大于
4.测速发电机
1)直流测速发电机
——楞次定律
2)交流发电机
5.电枢控制式直流电动机(结构同发电机)
楞次定律:
克希霍夫:
安培定律:
牛顿定律:
利用前四个方程中的三个消去中间变量得出:
时间常数
传递系数
同一系统输入输出量选择不同有不同形式的传递函数
若分别对每一个方程分别求传递函数,则可构成以下结构图:
——分析问题的角度不同,同一系统可以有不同形式的结构图,但彼此等价。
此图清楚的表明了电动机内部各变量间的传递关系,经简化后可得上面形式结构图
6.两相交流伺服电动机
堵转力矩:
机械特性:
牛顿定律:
利用前两式消去可得:
分别各式进行拉氏变换得:
方框图
7.齿轮系:
传动比
负载轴上的粘滞阻尼,惯量向电机轴上的折算:
对于电机轴:
为负载轴转矩⑴
对于负载轴:
⑵
在啮合点:
又有:
(4)
利用4式中的3个,消去中间变量:
一般地,有多级齿轮转动时:
可见:
由于一般减速器总有
∴越靠近电机轴的惯量、粘滞摩擦,对电机轴的影响越大,
远离电机轴的负载影响则较小
若一级减速比很大,则负载轴的影响可以忽略不计
8.调制器,解调器用于
1)交、直流元件协调工作时
2)交流元件,但工作频率不同时
调制:
把直流或低频信号驮在交流元件的工作频率上的过程
解调:
把驮在交流元件频率上的有用低频(或直流)信号取出来的过程
一般不考虑调制、解调器的动态过程,认为其传函为1
5.典型环节
依上讨论可见:
输入输出信号选择不同,同一元部件可以有不同的传递函数。
不同的元部件可以有相同形式的传递函数
1.环节——把传函形式相同的元部件归并在一起的分类——具有抽象性,概括性。
如,电位器,自整角机,测速发电机等等。
同属比例环节。
2.典型环节及其传递函数
序号
微分方程
环节名称
传递函数
例
1
比例环节
电位器,放大器,自整角机
2
惯性环节
CR电路,交、直流电动机
3
振荡环节
R-L-C电路,弹簧质块阻尼系统
4
积分环节
减速器
5
微分环节
测速发电机
6
一阶复合微分环节
7
二阶复合微分环节
注:
1)环节与部件并非一一对应,有时一个环节可代表几个部件,有时一个部件可表成几个环节
2)任一个系统的传递,可以视为典型环节的组合
如:
6.负载效应问题:
传递函数要在系统正常工作,考虑负载影响条件下推导出来
例如①右电网络,当两级相联时:
用算子法:
(1)
②当两级断开时:
第一级:
第二级:
而
(2)
比较
(1)
(2),可见两式不等。
∵当两级相联时,后级有分流,对前级有负载影响。
2典型环节及其传递函数
序号
微分方程
环节名称
传递函数
例
1
比例环节
电位器,放大器,自整角机
2
惯性环节
CR电路,交、直流电动机
3
振荡环节
R-L-C电路,弹簧质块阻尼系统
4
积分环节
减速器
5
微分环节
测速发电机
6
一阶复合微分环节
7
二阶复合微分环节
五、求时须注意的问题——负载效应
要在系统正常工作的条件下考虑其传递函数,把后一级对前一级的负载效应考虑进去。
例:
如右电路,求
解1当成整体看:
回路I:
⑴
回路II:
⑵
节点A:
⑶
电容:
⑷
电容:
⑸
⑵→⑷:
⑹
 升级会员
升级会员 