变频器培训docWord格式.docx
《变频器培训docWord格式.docx》由会员分享,可在线阅读,更多相关《变频器培训docWord格式.docx(41页珍藏版)》请在冰豆网上搜索。
1.转子串联电阻的机械特性
2.改变电压的机械特性
图2-5 改变电压的机械特性
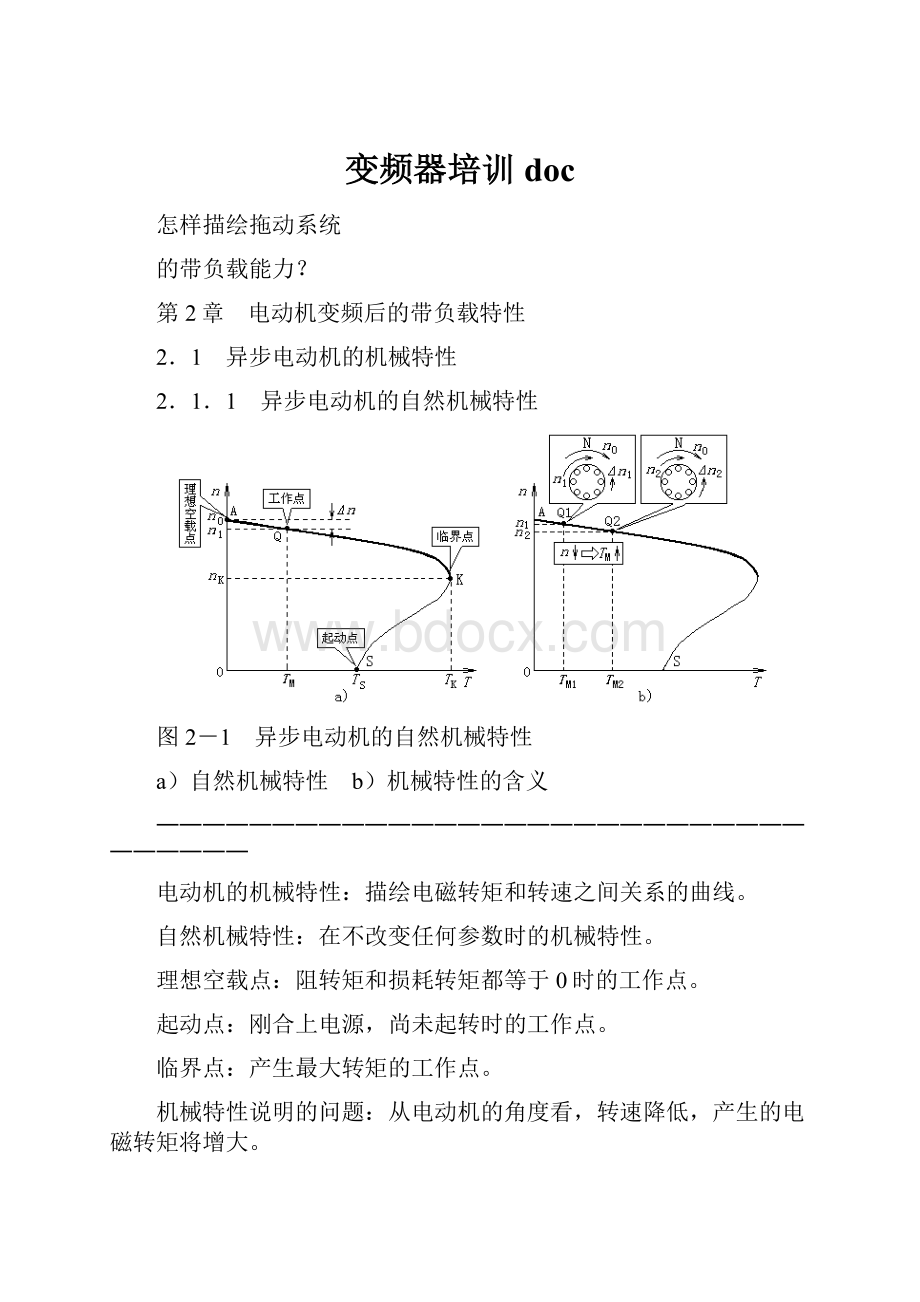
a)电路图 b)机械特性
临界转速不变,临界转矩减小,起动转矩减小。
可平滑起动。
不利于起动。
图2-6 fX≤fN时的机械特性
a)变频调速 b)变频机械特性簇
随频率的减小而下移。
临界转矩:
略有减小。
机械特性硬度:
基本不变。
可平滑调速。
低频时带负载能力略有减小。
3.改变频率的机械特性(kU=kf)
转矩变小的关键在磁通!
2.2 低频时临界转矩减小的原因
图2-7 有效转矩与磁通
――――――――――――――――――――――――――――――――――――
(1)电磁转矩总是和负载转矩(包括损耗转矩)相平衡的。
(2)电磁转矩正比于转子电流和磁通的乘积。
(3)电流是不允许超过额定电流的。
(4)临界转矩与磁通成正比。
2.2.1 有效转矩与磁通
2.2.2 与磁通有关的因素
2.2.3 频率下降时的磁通变化(kU=kf)
假设:
(1)ΔU=30V[I1=I1N](约30~40V)
(2)
≈U1X-ΔU1
图2-8 低频时临界转矩减小的原因
a)运行频率为50Hz b)运行频率为25Hz c)运行频率为10Hz
低频时运行特点
变频器的输出电压:
随频率的减小而下降。
电动机的阻抗压降:
如负载不变,则阻抗压降也基本不变。
反电动势:
有所减小。
磁通:
当kU=kf,I1=I1N时,在不同频率下的磁通量
fX(Hz)
U1X(V)
Φ1X(%)
50
380
100
20
152
87
40
304
98
10
76
66
30
228
94
5
38
23
2.3 增大转矩的对策之一 ——V/F控制方式
2.3.1 V/F控制的基本思想
图2-9 电压补偿的原理
a)电压补偿的含义 b)25Hz时的补偿量 c)10Hz时的补偿量
转矩提升的基本思想:
低频时适当补偿电压,使反电动势保持不变。
1.设置转矩提升功能
图2-10 转矩提升量的定义
a)基本U∕f线 b)转矩提升量
基本U∕f线:
kU=kf时的U∕f线。
基本频率:
与最大输出电压对应的频率。
转矩提升量:
UC%=
×
100%
2.转矩提升后的U∕f线
图2-11 负载变化(减轻)对磁通的影响
a)负荷率减轻至20% b)正常时励磁电流 c)饱和时励磁电流
只和频率有关,与负载无关。
阻抗压降:
负载减小时,阻抗压降也随之减小。
负载减小时,将有所增加。
负载减小时,将有所增加,甚至可使磁路饱和,励磁电流产生尖峰波。
3.转矩提升存在的问题
2.3.2变频器提供的U∕f线
图2-12 U∕f线的类型之一
a)U∕f线类别 b)恒转矩类U∕f线 c)二次方类U∕f线
第一步:
预置U∕f线类别。
第二步:
预置转矩提升量。
1.U∕f线的类型之一
图2-13 U∕f线的类型之二
a)二次方类 b)一次方类 c)恒转矩类
―――――――――――――――――――――――――――――――――
二次方律负载预置范围:
0.1~0.9(0.9对应于10%)。
一次方律负载预置范围:
1.0~1.9(1.9对应于10%)。
恒转矩负载预置范围:
2.0~20.0(20.0对应于10%)。
2.U∕f线的类型之二
3.U∕f线的类型之三
图2-14 U∕f线的类型之三
a)三点式U∕f线 b)多点式U∕f线 c)折线的预置
作出所需U∕f线。
作出近似折线。
第三步:
预置近似折线各拐点的坐标。
图2-15 自动转矩提升
a)自动U∕f线 b)手动提升过程 c)自动提升过程
手动提升特点:
提升量预置后,不同频率时的补偿量也就确定。
自动提升特点:
不论频率多大,每次自动搜索的增量都相同。
优点:
起动转矩大。
缺点:
容易引起振荡。
4.自动转矩提升
2.3.3 关于预置转矩提升功能的讨论
1.转矩提升量的初定
(1)满负荷时的最大提升量为:
UC%=10%
(2)测量负载在运行过程中的最大负荷率:
ξmax%=
≈
(3)转矩提升量约为:
UC%=10%×
ξmax%
=0.1ξmax%
(4)根据运行情况进行调整。
图2-16 塑料挤出机
转矩提升不足:
磁通小于额定磁通,故电流大于额定电流。
增大提升量:
磁通接近于额定磁通,电流接近于工频运行电流。
2.提升不足
2.提升过分
图2-17 转矩补偿后的电流—转矩曲线
a)电压补偿线 b)补偿后的电流曲线
转矩提升量过大的现象
负荷较重时:
磁路未饱和,转矩电流居主导地位,负载轻,电流小。
负荷较轻时:
磁路饱和,励磁电流居主导地位,负载越轻,电流越大。
(1)提升过分时的IM=f(TL)曲线
图2-18 转矩提升预置过分
a)风机的机械特性 b)U/f线的预置
针对二次方律负载:
低频运行时负荷率很低,应进行负补偿。
(2)提升过分的实例之一
图2-19 离心浇铸机的U∕f线选择
a)离心浇铸机示意图 b)机械特性 c)U∕f线选择
40Hz以下:
浇铸机处于轻载状态,不必补偿。
40Hz以上:
浇铸机虽然处于重载状态,因已接近于基本频率,也不必补偿。
(3)提升过分的实例之二
休 息 15 分
2.3.4 关于预置基本频率的讨论
1.电动机额定电压不符时的处理
图2-20 220V电动机配380V变频器
a)对基本频率的设定 b)变频器与电动机的对应关系
通过增大基本频率,使与50Hz对应的电压为220V。
(1)三相220V电动机配380V变频器
图2-21 270V、70Hz电动机配380V变频器
作出所需基本U∕f线OA。
延长OA至B,B点对应380V。
算出与B点对应的基本频率。
(2)270V、70Hz电动机配380V变频器
图2-22 电源电压与基本频率
a)电源电压偏低 b)降压节能
电源电压偏低:
为了保证额定磁通和转矩,应降低基本频率。
额频时降压节能:
“大马拉小车”时,适当加大基本频率,可减小与50Hz对应的电压,实现降压节能。
2.电源电压与基本频率
变频效颦赛“西施”!
2.4 增大转矩的对策之二 ——矢量控制方式
2.4.1 矢量控制的基本思想
图2-23直流电动机的调速
a)直流电动机结构示意图 b)直流电动机电路 c)调速后机械特性
直流电动机的特点:
(1)有两个互相垂直的磁场。
(2)两个电路互相独立。
1.直流电动机的特点
2.矢量控制的基本思路
图2-24矢量控制框图
将给定信号分解成两个互相垂直的磁场信号。
通过一系列等效变换,得到三相旋转磁场信号。
实现:
(1)转子磁通和主磁通互相垂直;
(2)主磁通保持不变。
2.4.2 电动机参数的自动测量(auto-tuning)
图2-25 矢量控制所需参数
a)铭牌数据 b)等效电路参数
铭牌数据:
额定容量、额定电压、额定电流、额定转速、效率等。
等效电路参数:
定子绕组的电阻和漏磁电抗;
转子等效电路的电阻和漏磁电抗,空载电流。
1.矢量控制需要的参数
图2-26 电动机的空载和堵转试验
a)空载试验 b)堵转试验
空载试验:
电动机脱离负载并空转,测量空载电流。
电动机不能脱离负载时,空载电流按40%IMN估算。
堵转试验:
电动机处于堵转状态,适当降低电压,测量短路电压和电流。
2.电动机的空载和堵转试验
3.自动测量的相关功能
(1)安川G7系列
表2-1 自动测量相关功能(安川CIMR—G7A)
功能码
功能含义
数据码及含义
T1—01
自动测量模式
0:
旋转自测量;
1:
静止自测量
T1—02
电动机额定功率
T1—03
电动机额定电压
T1—04
电动机额定电流
T1—05
电动机额定频率
T1—06
电动机的磁极数
T1—07
电动机额定转速
旋转自测量:
电动机脱离负载。
变频器通电,按下RUN键,先让电动机停止1分钟,再让电动机旋转1分钟(转速约为额定转速的50%~80%)。
按下STOP键,中止自测量。
静止自测量:
电动机不脱离负载。
变频器通电,按下RUN键,让电动机停止1分钟。
(2)V5-H系列
表2-2 自动测量相关功能(V5-H系列)
P9.01
P9.02
P9.03
P9.04
P9.15
参数自整定
静止自整定;
2:
旋转自整定
自整定过程中,如出现过电流或过电压,可适当延长加、减速时间。
变频器与电动机容量不匹配时,应选择静止自整定。
此外,在静止自整定时,电动机的空载电流应预置为额定电流的40%。
2.4.3 有反馈矢量控制和无反馈矢量控制
图2-27有反馈矢量控制方式
a)直接安装与接线 b)过渡轴 c)过渡轴套 d)联接附件
有反馈矢量控制:
外部有转速反馈的矢量控制。
转速反馈器件:
旋转编码器,有轴型和轴套型之分。
变频电动机:
选用轴套型编码器,直接套在电动机输出轴上。
普通电动机:
须通过过渡轴套或过渡轴以安装编码器。
联接附件:
如变频器不具备直接与编码器相接的端子,则通过专用的联接附件与编码器相接。
1.有反馈矢量控制接法
2.相关功能(艾默生TD3000)
功能码名称
数据码及含义(或范围)
Fb.00
编码器每转脉冲数
0~9999p∕r
Fb.01
编码器旋转方向
0—正方向;
1—反方向
Fb.02
编码器断线后处理方法
0—以自由制动方式停机;
1—切换为开环V∕F控制方式
图2-28 无反馈矢量控制方式
a)无反馈矢量控制示意图 b)机械特性曲线簇
无反馈矢量控制:
无外部转速反馈的矢量控制。
3.无反馈矢量控制
图2-29 不宜采用的场合
a)带多台电动机 b)容量差两档以上 c)8极以上 d)特殊电机
要点:
矢量控制在进行矢量变换时,部分变换系数是按照4极的配用电动机容量来设定的。
因此,当电动机的磁极数和实际容量的差别较大时,矢量变换将出现较大误差。
4.矢量控制方式的适用范围
2.5 增大转矩的对策之三 ——直接转矩控制方式
图2-30 直接转矩控制框图
1.直接转矩控制属于脉冲调速方式。
2.脉冲的形成由实测转矩与基准转矩比较而得(bang-bang控制)。
3.以保持磁通恒定作为辅助控制。
2.5.1 控制框图
2.5.2 主要优、缺点
1.优点
(1)动态响应能力强;
(2)只需一个参数(定子绕组电阻),初次通电就能测定。
2.缺点
(1)转矩有脉动,低频时较显著。
(2)脉冲频率较低,噪音较大。
何谓有效转矩?
2.6 变频调速的有效转矩线
2.6.1有效转矩线的概念
图2-31 额定工作点与有效工作点
有效转矩:
非额定状态下,允许长时间运行的最大转矩。
1.额定工作点与有效工作点
2.kU=kƒ时的有效转矩线
图2-32kU=kƒ时的有效转矩线
a)kU=kƒ时的U∕f线 b)有效转矩线的形成 c)有效转矩线
有效转矩线:
不同频率时有效工作点的联线。
性质:
是表示允许正常工作范围的界线,不是特性曲线。
2.6.2电动机变频后的有效转矩线
图2-33散热和有效转矩线的关系
a)各种损失与转速的关系 b)散热系数与转速的关系c)低频时的有效转矩线
低频时的有效转矩取决于散热:
频率低→转速低→散热变差。
1.ƒX≤ƒN的有效转矩线
2.有效转矩线的改善
图2-34 有效转矩线的改善
a)改善前后的有效转矩线 b)外部强制冷却 c)变频电动机
变频电动机的主要特点:
(1)有一个直接与电源相接的风扇,以便散热。
(2)输出轴较长,以便安装编码器。
(3)磁路裕量较大,不易饱和,用户便于掌握。
(4)槽绝缘加强,不易击穿。
3.ƒX>ƒN的有效转矩线
∵ 最大输出电压与功率不变U1X≡U1N,PM≯PMN
图2-35 fX>fN时的机械特性和有效转矩线
a)2倍频以下U∕ƒ线 b)额频以上机械特性c)有效转矩线
高频时有效转矩的恒功率性质
一方面:
因变频器的输出电压不可能超过额定电压,故fX>fN时,U∕ƒ比减小,磁通减小,临界转矩也减小。
另一方面:
频率升高→转速升高→因功率不能增加,故有效转矩减小。
∴ fX↑→U∕ƒ比↓→主磁通Φ1↓→临界转矩TKX↓
2.7 电动机机械特性的调整
机械特性软、硬可随意!
2.7.1 机械特性变硬(转差补偿)
图2-36 转差补偿
a)运行有转差 b)转差的补偿
转差补偿:
在给定频率不变的情况下,负载增大时,适当提高输出频率。
1.转差补偿的含义
2.转差补偿的应用举例
图2-37 转差补偿的应用
a)额定频率时的补偿 b)低频运行时的补偿
额频运行时:
可使实际转速高于额定转速。
很低频率时:
可使电动机很低速运行。
2.7.2 机械特性变软(下垂特性)
图2-38 下垂特性
a)电动扶梯上升 b)负载重,转速低
下垂特性的含义:
加大转差,使机械特性变软。
下垂特性的作用:
重负载时降低转速。
1.下垂特性的含义
2.下垂特性的应用举例
图2-39 桥式起重机的大车
大车的拖动特点:
两侧各由一台电动机拖动,由同一台变频器供电。
休 息 15 分 钟
电气工程师
勿忘传动机构!
2.8 传动机构是拖动系统的组成部分
2.8.1 传动机构及其作用
图2-40 传动机构的作用
a)传动比为1 b)传动比为5
传动比增大时:
(1)转速降低
(2)转矩增大
1.传动机构的作用
2.原理
λ=
nL=
根据能量守恒的原则,有:
=
∴TL=TM·
λ
减速器输出轴上的转矩比电动机的输出转矩增大了λ倍!
图2-41 传动比与有效转矩(从负载侧看)
a)拖动系统举例 b)有效转矩线
曲线①—负载机械特性;
曲线②—λ=5时,减速器输出轴的有效转矩
从负载侧看拖动系统
λ=5:
TM’=484×
5=2420N·
m(曲线③)
>TL(=2258N·
m)—能带动。
2.8.2 传动系统为啥要折算?
图2-42电动机和负载的工作点
在同一个n=f(T)坐标系里:
电动机轴上的数据是[50,1440],工作点在Q1。
负载轴上的数据是[200,360],工作点在Q2。
将Q1和Q2变成一点的方法:
所有数据都折算到同一轴上。
1.折算的必要性
2.折算的基本原则
稳态过程:
折算前后,传动机构所传递的功率不变。
动态过程:
折算前后,旋转部分储存的动能不变。
3.折算公式
(1)转速的折算nL’=nL·
λ=nM
(2)转矩的折算TL’=
(3)飞轮力矩的折算(GDL2)’=
经减速器减速后,电动机轴上的飞轮力矩减小了λ2倍!
十分有利于电动机的起动。
经减速器减速后,相当于使电动机轴上的负载减轻了λ倍!
图2-43 传动比与折算转矩(从电动机侧看)
曲线①—电动机额定转矩;
曲线②—λ=5时,负载的折算转矩
从电动机侧看拖动系统
TL’=2258÷
5=451.6N·
<TMN(=484N·
实例:
某电动机,带重物作园周运动,如图所示。
运行时,到达A点后电动机开始过载,到达B点时容易堵转,怎样解决?
(上限频率为45Hz)。
将传动比加大10%,则在电动机转矩相同的情况下,带负载能力也加大10%。
但这时的上限频率应加大为49.5Hz。
图2-44 重物园周运动
加大传动比的结果:
使变速箱输出轴的转矩增大。
或 使折算到电动机轴上的负载转矩减小。
传动比改变后,工作频率的计算举例
负载转速
传动比
电动机转速
工作频率
296(不变)
2
592
1480(不变)
20.4
4
1184
1480
ΔnN=1500-1480=20r/min
fX=
能量守恒须牢记!
2.9 变频拖动系统的基本规律
2.9.1变频拖动系统必须满足哪些条件?
图2-45拖动系统的功率关系
电动机轴上的额定输出功率必须大于负载所需功率!
1.电动机与负载的功率关系
2.电动机与负载的转矩关系
图2-46 拖动系统的转矩关系
电动机的有效转矩必须大于负载的折算转矩!
2.9.2 拖动系统的重要规律与常见误区
图2-47甩掉减速器
不要减速箱,把频率降低为原来的1/5,一样减速。
[误区一]可以甩掉减速器吗?
图2-48甩掉减速器
a)原来数据 b)甩掉减速器的数据
 升级会员
升级会员 