推瓶机 机械原理课程设计Word文档下载推荐.docx
《推瓶机 机械原理课程设计Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《推瓶机 机械原理课程设计Word文档下载推荐.docx(12页珍藏版)》请在冰豆网上搜索。
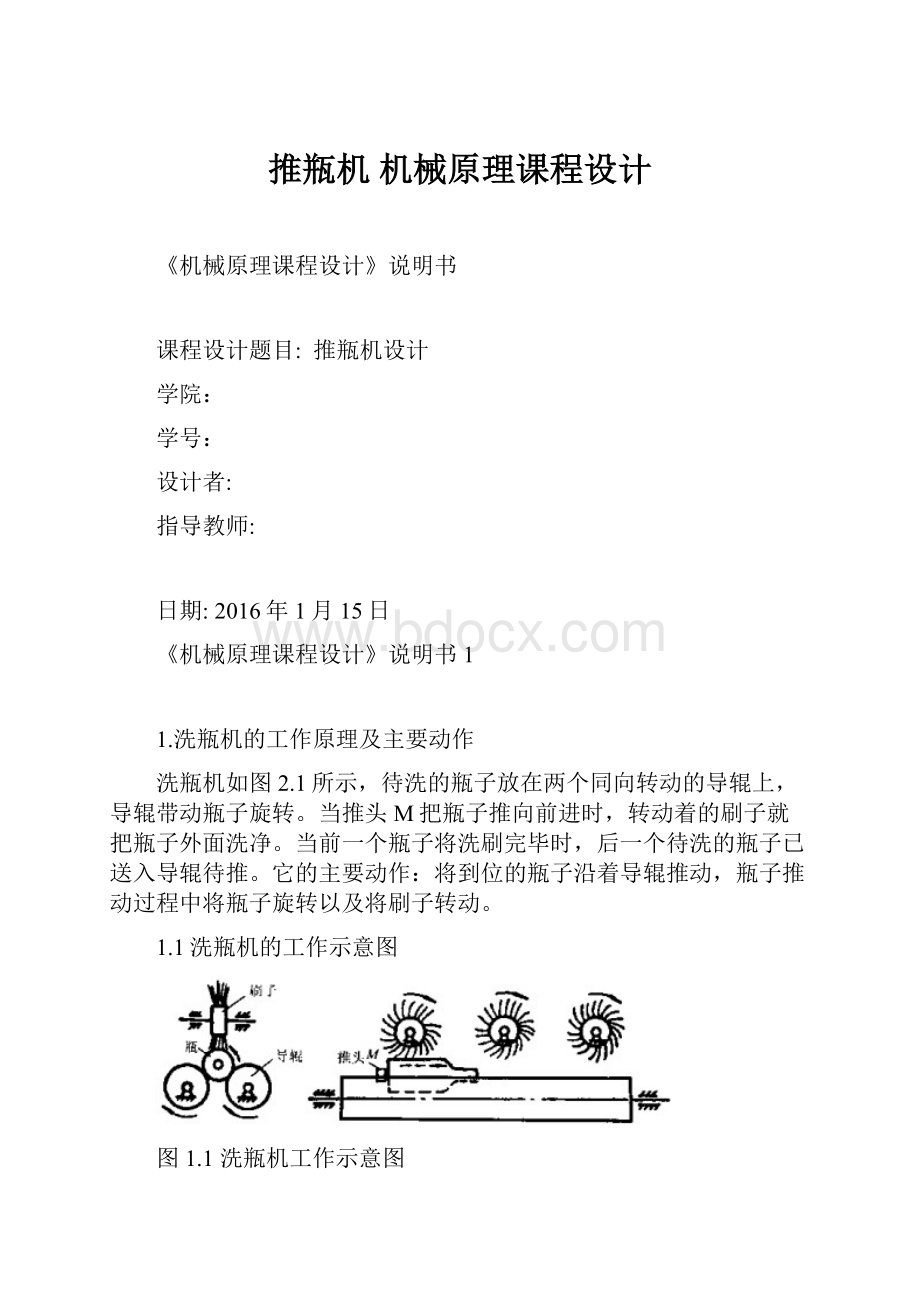
1.1洗瓶机的工作示意图
图1.1洗瓶机工作示意图
1.2原始数据
①瓶子尺寸:
大端直径d=80mm,长200mm。
②推进距离:
600mm。
1.3推瓶机构的设计要求
1.洗瓶机的推瓶机构:
平面连杆机构等常用机构或组合机构。
2.推瓶机构应使推头M以接近匀速的速度推瓶,推进距离L=600mm然后推头快速返回原位,准备第二个工作行程。
3.设计组合机构实现运动要求,并对从动杆进行运动分析。
推程时速度要求为
,返回时的平均速度为工作行程的3倍。
4.机构的传动性能好,结构紧凑,制造方便。
5.编写设计说明书。
2.系统功能图
推杆匀速推瓶
减速返回待洗瓶子放入
导辊带动瓶子转动
加速返回推瓶完成刷子旋转洗瓶
3.推头运动路线的分析
分析设计要求可知:
洗瓶机主要由推瓶机构、导辊机构、转刷机构组成。
设计的推瓶机构应使推头M以接近均匀的速度推瓶,平稳地接触和脱离瓶子,然后,推头快速返回原位,准备第二个工作循环.在运动中,两个导辊以恒定的转速转动,带动瓶子转动;
刷子也以恒定的转速转动;
推进距离:
推杆机构带动的M点推进距离为600mm。
根据设计要求,推头M可走图2.4所示轨迹,而且推头M在工作行程中应作匀速直线运动,在工作段前后可有变速运动,回程时有急回。
由此可根据其运动轨迹选择推瓶机构的设计方案。
应该选择具有急回运动特性的机构。
图3.1推头M运动轨迹
对这种运动要求,若用单一的常用机构是不容易实现的,通常要把若干个基本机构组合,起来,设计组合机构。
在设计组合机构时,一般可首先考虑选择满足轨迹要求的机构(基础机构),而沿轨迹运动时的速度要求,则通过改变基础机构主动件的运动速度来满足,也就是让它与一个输出变速度的附加机构组合。
4.方案的设计与分析决策
4.1方案的设计
根据推头的运动轨迹分析得知推瓶机构主要是控制推头做推瓶和急回运动,故选择机构方案可从能实现急回运动的机构考虑。
根据已学知识得知能做急回运动的机构有曲柄滑块机构,凸轮机构,和连杆组合机构等。
他们各自有自己的特点。
通过综合考虑列出如下机构作为参考方案:
方案一:
如图4.1,所示凸轮一铰链四杆机构的连杆2上的M点能基本实现所要求的轨迹.
图4.1
方案二:
如图4.2,该方案的的运动由凸轮机构和四杆机构协调运动完成,这种组合可以很好的对推头进行控制,不仅结构简单,体积小,安装后便于调试,从经济上也比较合适
图4.1双凸轮连杆组合机构
4.2方案的分析与决策
方案一中机构由凸轮四杆机构组成,凸轮为原动件,通过滚子及连杆带动机构做运动。
其急回特性由凸轮控制。
在该方案中有5个活动构件,其中有一个高副,自由度为1,有确定的运动。
但是它的杆比较多,容易产生误差,不能实现精确的运动。
方案二的运动由凸轮机构和四杆机构协调运动完成,这种组合可以很好的对推头进行控制,不仅结构简单,体积小,安装后便于调试,从经济上也比较合适。
其中凸轮轴能很好的协调推头的运动而且工作平稳。
其缺点是四杆机构的低副之间存在间隙,会产生累计误差。
要准确的实现给定运动规律及运动轨迹,凸轮机构是首选,因为盘形凸轮轮廓就是根据从动件运动规律来设计的,而任意平面轨迹总可以用
X=x(
)
Y=y(
表示,因此把两个凸轮机构组合起来就可以准确实现轨迹。
而四杆机构在运动规律、运动轨迹设计中是用逼近的办法来做的,所以较难准确实现。
在方案中,利用了两个凸轮分别控制X和Y方向上的运动,且连杆不是很多,设计中要求速度也不是很快,所以该方案比较准确。
5.推瓶机运动简图绘制
6.尺寸综合
6.1.1设计推导的公式
6.1.2杆长的设计及确定
1.为了满足传动角的一定要求可以初步设计确定杆在两个特殊位置(推头位移最大和最小时,并且最大与最小的差值大于等于600mm)所形成的这一夹角所在的范围。
2.杆长l2与中心距和基圆大小有关,根据压力角的范围可以大概设计出杆l2的长度。
3.同理杆l3的杆长与另外一个凸轮的基圆有关系,同样在保证满足压力角的许可范围设计杆l3的长度。
4.根据凸轮压力角和基圆半径的关系,使压力角在许用范围内。
根据前述推导公式可计算得
L=900mml1=700mml3=600mml2=135mm
=133º
=26º
=47º
E=200mmF=140mm
6.2分点和推杆的位置及凸轮参数的设计
分点和推杆的位置图
设计中要求推杆在推进过程中的速度为45mm/s,推进行程为600mm,然后做急回运动,工作条件为轻载有急回,因此由推杆和凸轮的的运动规律,设计如下的参数:
摆动凸轮:
摆动凸轮
推程角:
180
远休止:
40
回程角:
100
进休止:
基圆半径:
90mm
推程:
60mm
滚轮半径:
10mm
直动凸轮:
直动凸轮
260
20
60
推程:
70mm
6.3.洗瓶机的运动循环图
洗瓶机的运动循环图如下:
推杆机构带动的M点(mm/s)
急回
近似匀速直线运动
摆动凸轮(转角/度)
0-180
180-220
回程:
220-320
320-360
直动凸轮(转角/度)
0-260
260-280
280-340
340-360
导辊(r/min)
匀速转动
刷子(r/min)
7.凸轮的设计与廓线的绘制
7.1.摆动凸轮的设计
摆动凸轮的位移线图:
根据位移线图画出的凸轮的廓线:
7.2.直动凸轮的设计
直动凸轮的位移线图如下:
由位移线图画出的凸轮廓线如下:
7.3压力角的检验
实际设计中规定压力角的许用值[ɑ]。
对摆动从动件,通常取[ɑ]=30º
,对于直动从动件,通常取[ɑ]=35º
—45º
。
回程程时,由于推杆运动是力封闭的,不存在自锁的问题,所以压力角的许用[ɑ]=70º
-80º
滚子接触、润滑良好和支撑有较好刚性时取数据上限否则取下限。
现通过移动从动件和摆动从动件凸轮廓线中可以得出:
移动从动件在运动中最大压力角ɑ=21º
<
[ɑ];
摆动从动件在一个周期内的最大压力角ɑ=15º
[ɑ]。
7.4机构尺寸的确定
杆件代号
l1
l2
l3
L
设计参数值(mm)
700
135
600
900
8.运动参数设计
已知,推程中V=45mm/s,回程时V=135mm/s,所以整个运动周期为:
T=t(推程)+t(回程),所以周期约为T=16.30s,所以凸轮的角速度为0.368rad/s.
9.推瓶机动力装置和传动系统的设计
9.1动力装置的选用
因为在推瓶机的运动为轻载有急回的运动,因此查电动机参数对照表后,选用功率为0.75kw,转速为910rad/min的电动机。
9.2传动系统的设计
电动机的转速为910rad/min,即15.16rad/s,而凸轮所需的转速为0.368rad/s.因此从电动机到凸轮的传动过程中需要对电动机的转速进行减速,减速的传动比为i=15.16/0.368=41.2.设计为三级减速.传动系统的示意图如下:
传动系统的齿轮参数:
齿轮
齿数
模数
分度圆直径(mm)
Z1
2
Z2
80
160
Z3
Z4
Z5
Z6
52
102
10.心得体会
在这一周的的课程设计中,我从一开始学习设计推杆,凸轮,查找资料,确定机构它们的参数;
然后利用用制图画运动简图,凸轮的位移线图,凸轮的轮廓线图等,最后检验我设计的参数是否合理。
在这一周的课程设计中,我学会了把课本上的知识与实际得运用。
课本上的很多知识都很抽象,比如凸轮的轮廓线和基圆半径的确定等一些凸轮的参数的计算公式,计算起来也很繁琐,需利用电脑软件计算,通过对这些公式的运用,加深了我对这些知识的理解。
通过用CAD画凸轮的廓线,让我更加清晰的认识凸轮的工作原理,同时也锻炼了我的计算机绘图的能力。
在设计中,摆动凸轮的设计比较难。
11.参考文献
1.《机械原理》——孙恒,陈作模,葛文杰主编-高等教育出版社
2《机械原理课程设计指导书》——戴娟主编-高等教育出版社
 升级会员
升级会员 