并联机床的刀位文件预处理Word下载.docx
《并联机床的刀位文件预处理Word下载.docx》由会员分享,可在线阅读,更多相关《并联机床的刀位文件预处理Word下载.docx(10页珍藏版)》请在冰豆网上搜索。
由交流伺服电机和滚珠丝杠副驱动各伸缩杆运动。
刀具安装在动平台上,由主轴电机驱动。
动平台和刀具可实现六自由度的空间运动。
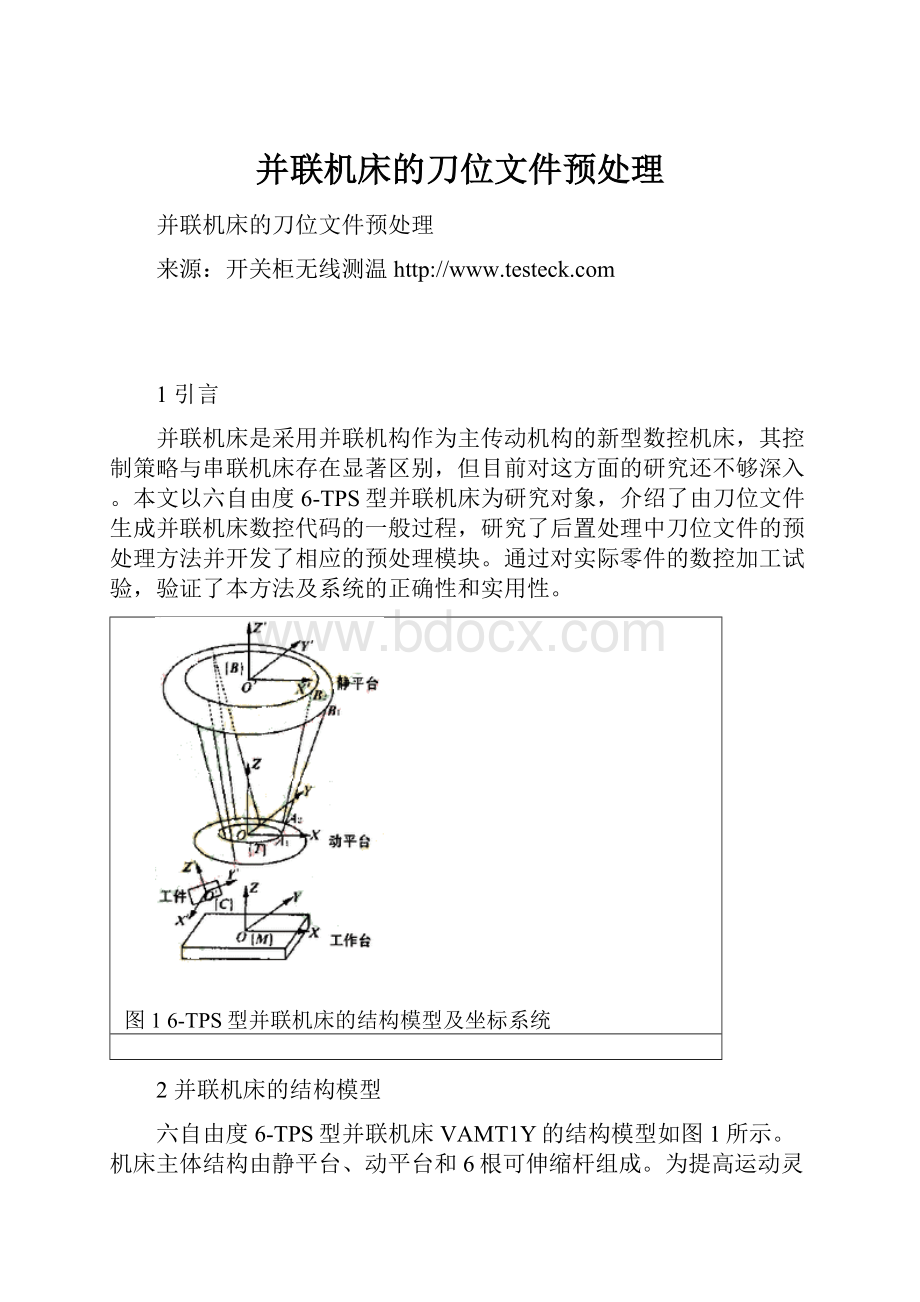
建立图1所示坐标体系。
机床坐标系{M}位于工作台上,又称为加工坐标系;
动坐标系{T}位于动平台上;
基础坐标系{B}位于静平台上,其三个坐标轴方向与{M}相同;
工件坐标系{C}是工件编程的基准坐标系,也称为编程坐标系。
3并联机床控制数据的生成
并联机床控制数据的生成过程如图2所示。
系统接收到来自CAM系统的刀位文件后,首先进行数据预处理;
然后获取机床结构参数(包括静、动平台12个铰链的安装坐标、基准矢量及转动范围,动平台及6根伸缩杆的质量,伸缩杆的基本长度及可伸缩范围、直径尺寸及其运动速度、加速度、驱动力额定值等)和切削条件参数(包括刀具的进给率、快进速度等);
然后根据满足作业空间和加工精度的原则,确定{C}相对于{M}的定位矢量,并经过代码转换生成基于{M}的刀位文件;
最后进行笛卡尔空间的插补计算,生成任务空间的坐标点阵,同时计算对应的动平台位姿,并利用运动学逆解算法生成实际伺服轴的控制数据。
图2并联机床控制数据的生成过程
由相对于{C}的刀位文件生成基于{M}的机床动平台位姿的过程可表示为
MTCTCCq=MTT[00-Ltl]T
(1)
MTCTCCk=MTT[0010]T
(2)
式中:
Lt——刀具长度
Cq——刀具相对于{C}的位置矢量,Cq=[qxqyqz1]T
Ck——刀具相对于{C}的方向矢量,Ck=[kxkykz0]T
TC——刀位文件的预处理矩阵
MTC——工件坐标系的定位转换矩阵,用于描述{C}与{M}的关系
MTT——机床运动传输矩阵,由{T}相对于{M}的位置矢量MrT和姿态矩阵MRT构成,其具体形式为
T=
[
MRT
MrT
]
1
(3)
根据已求出的动平台位姿MrT和MRT,利用机构逆解算法可求得各伺服轴的坐标。
静、动平台各铰链点相对于{B}和{T}的位置矢量为BBi=[Xi,Yi,Zi]M和TTi=[xi,yi,zi]M,其相对于{M}的坐标为
MBi=MrB+MRBBBi(i=1,2,…,6)
(4)
MTi=MrT+MRTTTi(i=1,2,…,6)
(5)
式中MrB,MRB——分别为{B}相对于{M}的位置和姿态矩阵,由机床结构参数确定
根据图1定义,MRB为单位矩阵,因此各伺服支链的矢量为
lili=MBi-MTi(i=1,2,…,6)
(6)
li——第i条支链的方向矢量
li——第i条支链的长度坐标
将式(6)对时间求导,可得速度表达式为
V=Jv
(7)
V——由6根伸缩杆的速度组成的关节空间速度矢量
v——刀具在笛卡尔空间中的六维速度矢量
J——雅可比矩阵,反映关节空间向工作空间传递速度的广义传动比
4刀位文件的数据预处理
对于一些具有对称结构的零件,为减小零件编程工作量,一般不需要CAD/CAM系统生成零件的全部刀位文件,这就要求系统具有对刀位文件进行镜像或旋转处理的功能,即对刀位文件数据进行预处理,确定式
(1)和式
(2)中的TC。
为此,在VAMT1Y的后置处理器中设计开发了一个数据预处理模块,其功能包括:
①正常格式转换;
②X-Y平面的镜像变换;
③Y-Z平面的镜像变换;
④Z-X平面的镜像变换;
⑤(X=Y)-Z平面的镜像变换;
⑥(X=-Y)-Z平面的镜像变换;
⑦绕X轴的旋转变换;
⑧绕Y轴的旋转变换;
⑨绕Z轴的旋转变换。
转换形式为
Cq1=TCCq
(8)
Ck1=TCCk
(9)
Cq1——转换后的刀具位置
Ck1——转换后刀具位置的方向矢量
刀位文件预处理矩阵TC具有以下几种形式:
1正常格式
TC=I
1X-Z平面镜像
TC=TX-Z=
-1
1Y-Z平面镜像
TC=TY-Z=
=1
1X-Y平面镜像
TC=TX-Y=
1(X=Y)-Z平面镜像
可认为首先绕Z轴旋转45°
,然后相对于X-Z平面作镜像,最后将坐标系绕Z轴旋转-45°
,其变换矩阵为
TC=Rot(Z,p/4)TX-ZRot(Z,-p/4)=
1(X=-Y)-Z平面镜像
可认为首先绕Z轴旋转-45°
,然后相对于X-Z平面作镜像,最后将坐标系绕Z轴旋转45°
1绕X轴旋转q
TC=Rot(X,q)=
Cq
-Sq
Sq
1绕Y轴旋转q
TC=Rot(Y,q)=
1绕Z轴旋转q
TC=Rot(Z,q)=
图3数控加工试验
5数控加工试验
为验证刀位文件预处理算法的正确性及预处理模块的实用性,对图3所示的一个上顶端截面为圆、下底端截面为椭圆的锥形柱体零件进行了数控加工试验。
首先通过ProE建模生成刀位文件。
由于该零件结构对称,因此只需生成一个象限下的刀位文件即可。
生成的部分刀位文件如下:
$S*Pro/CLfileVers1.0
MACHIN/AIMILL,M0001UNITS/MM
LOADTL/1
$$->
CUTTER/12.000000
MULTAX/ON
COOLNT/ON
SPINDL/RPM,800.000000,CLW
$$SETSTART/0.0000000,0.0000,700.00000,$0.0000,0.0000,1.00000
RAPID
GOTO/0.00000,-28.43108,80.00000,0.00000,-0.17365,0.98481
GOTO/0.00000,-28.43108,13.78731,0.00000,-0.17365,0.98481
FEDRAT/200.
GOTO/0.00000,-24.95811,-5.90885,0.00000,-0.17365,0.98481
GOTO/26.11525,0.00000,79.78946,0.04197,0.00000,0.99912
GOTO/26.11525,0.00000,120.00000,0.04197,0.00000,0.99912
END/
FINI
在经过正常格式、X-Z平面镜像、Y-Z平面镜像和绕Z轴旋转四种格式的转换后,增加了Z轴方向的偏置,得到四个象限下的动平台位姿文件,其中第一象限下的文件如下:
%
N2H136.000000
N4S800.000000
N6G92X0.0000000Y0.0000Z700.000000A0.000000B0.000000C0.000000
N8G00X0.0000000Y0.0000Z464.000000A0.000000B0.000000C-0.235619
N10G00X0.000000Y-28.431080Z164.000000A0.000000B0.174520C-0.235619
N12G00X0.000000Y-28.431080Z97.787310A0.000000B0.174520C-0.235619
N14F200.
N16G01X0.000000Y-24.958110Z78.091150A0.000000B0.174520C-0.235619
N592G01X26.115250Y0.000000Z163.789460A-1.570796B-0.04195C1.335177
N594G00X26.115250Y0.000000Z204.000000A-1.570796B-0.04195C1.335177
N596M02
该文件经过作业空间检验、速度控制、插补计算和虚实映射变换后,即得到实轴控制指令,并将其输入伺服控制系统。
虽然该零件的数控加工程序由四个程序段的一千余行程序组成,但加工中刀具运行平稳、速度均匀,加工样件的表面精度达到普通五轴铣床的水平。
6结语
本文重点研究了六自由度6-TPS型并联机床的刀位文件预处理方法,所开发的预处理模块具有对刀位文件进行多种镜像和旋转处理的功能,可增强机床的数据接收能力。
对实际零件的数控加工试验验证了预处理算法的正确性和预处理模块的实用性。
 升级会员
升级会员 