斗轮堆取料机使用说明书正文英文Word格式.docx
《斗轮堆取料机使用说明书正文英文Word格式.docx》由会员分享,可在线阅读,更多相关《斗轮堆取料机使用说明书正文英文Word格式.docx(50页珍藏版)》请在冰豆网上搜索。
1.2.2Reclaimingoperationiscarriedoutaccordingtolayerreclaimingprocessaswellasbevelreclaimingifnecessary.Thecoalwillbeexcavatedandreclaimedbythebucket(bucketwheelmechanism),anddeliveredtoboomconveyor.Thentransferchuteviayardconveyoroutput.Bucketwheelboomluffingcanrealizehigh&
lowlevelreclaiming;
Bucketwheelboomslewingcanreachleft-rightstockyardandstockyardwidthreclaiming.
Forbiddentoreclaimthematerialonlydependingonlongtravel.
Chapter2Performanceofthemachineandmaintechnicalparameter
1Typeofequipment
DQ500/1000.35type,itmeans:
35-slewingradius(thedistancefrombucketwheel
centertoslewingcenteroftheequipmentis35m);
1000--stackingcapacity1000tons/hour;
500--reclaimingcapacity500tons/hour;
Q……reclaiming;
D……stacking。
2Naturalconditionofthecoalyard
Coalyardtype:
shuttlingtypelayout
Coaldensity:
0.85~1t/m3
Heightofstockpile:
13mabovetherail,
and1.5mbelowtherail
3Mainparameterofequipment
Ratedcapacity:
Stackingcapacity:
1000t/h
Reclaimingcapacity:
500t/h
a.Longtravel
Travelingspeed:
Operatingspeed:
7m/min;
Commissioningspeed:
30m/min
Wheelbaseandwheelgauge:
7mx7m
Motorpower:
4x11kW
Reducertype:
FH127GDV160M4BM/HF
Outputrpm.ofreducer:
14.45r/min
Braketype:
withthegearbox
Railclamptype:
TZT-J100
Limitswitchofanchordevice:
XCKS141H29
b.Slewunit
Slewingradius:
35m
Slewingspeed:
0.02~0.12r/min
Slewingangle:
stackingangle:
±
110°
reclaimingangle:
Motortype:
Y2-200L-8
15kW
PHF062+KF107AD6
Transmissionratioofreducer:
i=774.4
Braketype:
YWZ9-200/E23
c.Bucket-wheelmechanism
Reclaimingcapacity:
Outerdiameterofbucket-wheel:
Φ5200mm
rpmofbucket-wheel6.5r/min
Bucketcapacity:
0.2m3
Bucketquantity:
9nos.
Drivingdeviceparameter:
Motortype:
Y225M-4
45kW
P2HF052+MC2RLS03
i=226.86
Limitedtorquefluidcouplingtype:
YOXA450
d.Luffunit
Luffingangle:
Luffup12.04°
,Luffdown11.87°
Luffingspeed:
3~5m/min(atthecenterofbucket-wheel)
Typeofhydrauliccylinder:
250MP5
Hydrauliccylinderform:
doubleactingcylinder
Ratedworkingpressure:
16Mpa
e.Boomconveyor
Lengthofboomconveyor:
36.83m
Conveyingcapacity:
1500t/h
Beltwidthxbeltspeed:
1200mmx3.15m/s
Idlerdiameter:
φ133mm
Troughangleoftheilder:
35°
Takeuptype:
Heavybobtakeup
Y280S-4
75kW
MC3RLHF05+1FAN
i=20.22
Limitedtorquefluidcouplingtype:
YOXⅡZ-450
YWZ-300/45
Longitudinalsplitingprotectionswitchtype:
HFZL-K
Dualdirectionpullingwireswitchtype:
KLT2-Ⅰ
Misalliancedetectingswitchtype:
FPK-12-30
Speedsensortype:
SJK-B-Ⅲ
boomconveyormaterialflowdetectingswitchtype:
LJ-Ⅲ
f..Dustsuppressionsystem/Sprinklingsystem
Watertankvolume:
10m3
Pumptype40DL6.2-11.8X7
Flowofthepump:
6.2m3/h
Deliverylift:
82.6m
Typeofmotorequippedwithpump:
Y132S1-4
Motorpower:
5.5kW
Rotationalspeedofmotor:
1450r/min
Liquidlevelrelay:
UQK-02
Electromagneticvalve:
ZCLF-20
Waterpressureenteringintowatertank:
0.1~0.2MPa
g.Powercablereeler
Cablespecification:
F-3PNCT3x35+1x16mm2
Cablecrossdimensions:
91.6mmx31mm
Cablereelertype:
T1C-[J2D-4]x2(right)
h.Controlcablereeler
F-3PNCT-30x2.5+2Gmm2
82.8mmx23.7mm
T1C-[J3K37]x1(left)
i.Transferchute
ElectricalthrustorMT300500Ⅲ-60
JammingdetectorLD-X
j.Trippercarguidechutedevice
lockingpreventiondeviceZFB-6
blockagedetectorLD-X
k.Limitedswitch
Anti-collisiondeviceofboomrack:
FKLT2-I
OtherlimitedswitchesXCKS141H29
Note:
Otherlimitswitchesmeanboomrackluffinglimitedposition,slewingangle,slewingluffandterminallimitedpositionofLongtravel.
l.Detectiondevice
Detectiondevicefortravelingdistance:
XCC1406PR01Ktyperotaryencoder
Detectiondeviceforslewingangle:
XCC2506PS81KBtyperotaryencoder
Detectiondeviceforluffingangle:
Detectiondeviceforstockpilelevel:
20-39typeincliningswitch.
Chapter3Equipmentstructure
Section1:
GeneralStructure
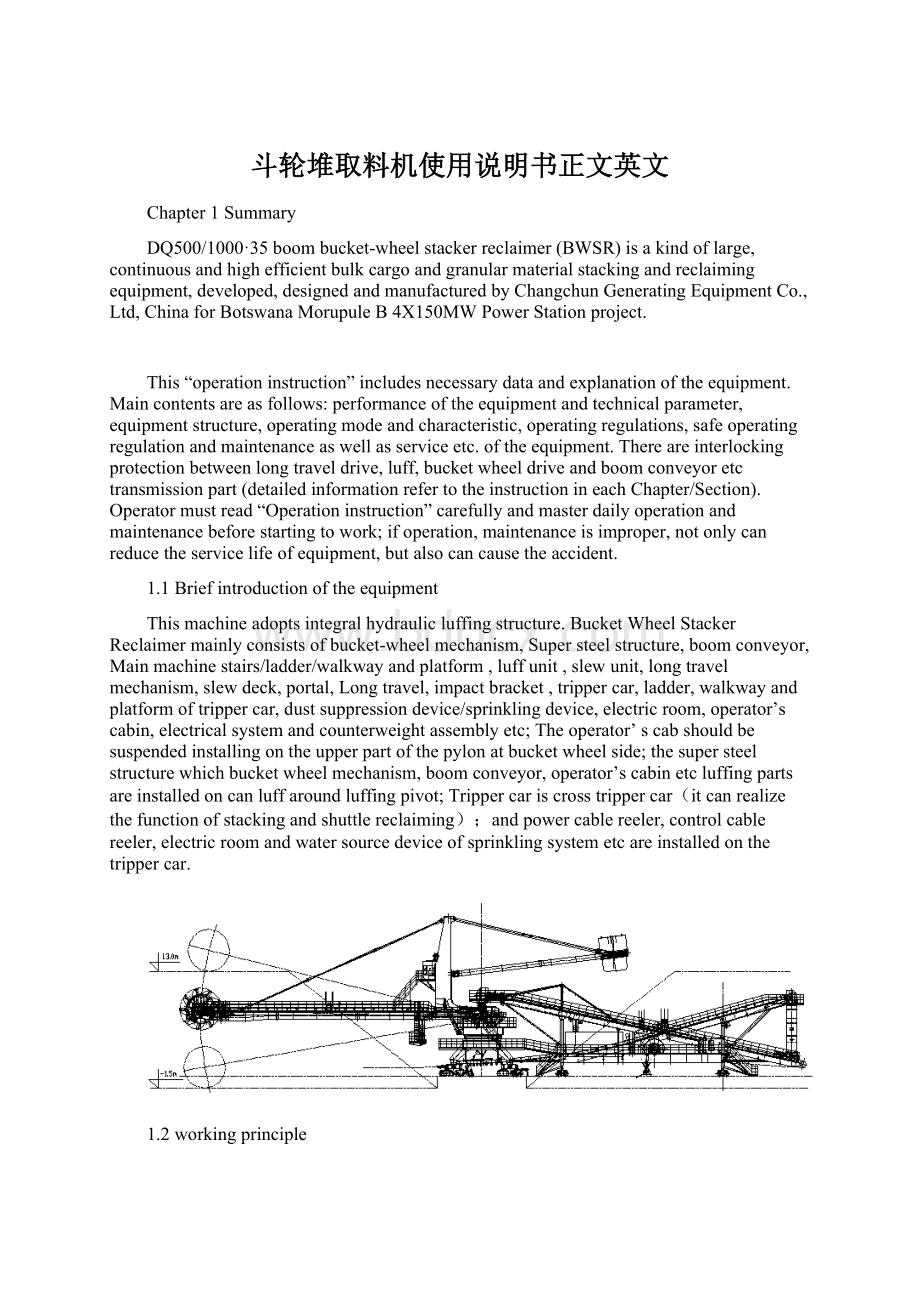
Theequipment(seedetailsingeneralarrangementdrawingDQ9912.0ST)consistsofbucket-wheelmechanism,supersteelstructure,boomconveyor,mainladderplatform,luffinghydraulicdevice,portal,supportpivot,slewdeck,transferchute,slewingmechanism,limitedswitchdevice,detectiondevice,longtravel,centrallubricationsystem,powercablereelerdevice,controlcablereelerdevice,trippercar,impactbracket,ladderplatformoftrippercar,dustsuppression/sprinklingsystem,electricroom,electricalsystem,operator’scabin,nameplate,counterweightassembly,foundationallayout,loadandsoon.
Superstructureofmainmachineisanintegralstructurewhichconsistsofboomrack,pylon,counterweightboomandfrontandbackbracing,allpartswillbeconnectedbypinrollwhichfixedbyblock.Headpartisbucket-wheelmechanism;
backpartiscounterweightassemblywhichcanadjustthebalanceofsuperstructure.Superstructureisfixedonslewdeckbysupportpivot,theupperpartofthesupportpivot(bearingbody)willbeweldedwiththelowerplaneofthepylon;
thelowerpartofthesupportpivot(supportingblock)willbeweldedwiththeupperplaneoftheSlewdeck.Thecompletedstructurecanwagglearoundthesupportpivotpoint,Hydrauliccylinderwhichliebetweenslewdeckandpylonactscanachieveintegralluffofsuperstructure.Slewsupportbearingismountedbetweenupperandlowerpedestalring,upperpedestalringsupportstheslewdeck,andlowerpedestalringisfixedontheportal.Slewdrivingdeviceisfixedontheslewdeck,andthroughoutputaxispinionofslewingreducer,thespurpinionismeshedwithbiggearringwhichisfixedunderthebearingoflowerpedestalring,whichshalltransmitupperstructuretorotatearoundslewcenter.Pivotoftravelingmechanismisweldedwithsupportlegofportal.Sincesuchstructureadoptsintegralmachineluffstructuraltype,ithaslessconnectingjoints,lessservices,andhighsecurity.
Section2:
Detailedstructureofunitandoperatingfeatures
1Bucket-wheelmechanism
1.1Structure
Bucket-wheelmechanismmainlyconsistsofbucketwheeldrivedevice,ringchute,bucketwheelbody,bucketwheelshaft,bucket,slidingchuteandguidechutedeviceetc.Bucketwheeldrivedeviceconsistsofmotor,gearbox/reducer,blockanddrivegearetc.;
throughmotor-gearboxtransmittedtobucketwheelshaft.Sobucketwheelbodycanbedrivenbybucketwheeldrivedevice,andcanbecarriedoutreclaimingoperation.
Totalninebucketswithbucketteetharefixedonbucketwheelbody(bucketteethshouldbedetachable)bypinrollsandpins,Bucketwheelmechanismconsistsofthem.Bucketwheelbodyiscelllesstype,inorderto
 升级会员
升级会员 