智能小车控制系统中英文对照外文翻译文献Word格式.docx
《智能小车控制系统中英文对照外文翻译文献Word格式.docx》由会员分享,可在线阅读,更多相关《智能小车控制系统中英文对照外文翻译文献Word格式.docx(24页珍藏版)》请在冰豆网上搜索。
2.硬件系统设计
要实现模糊PID控制算法的设计,有必要设计一个智能小车硬件系统。
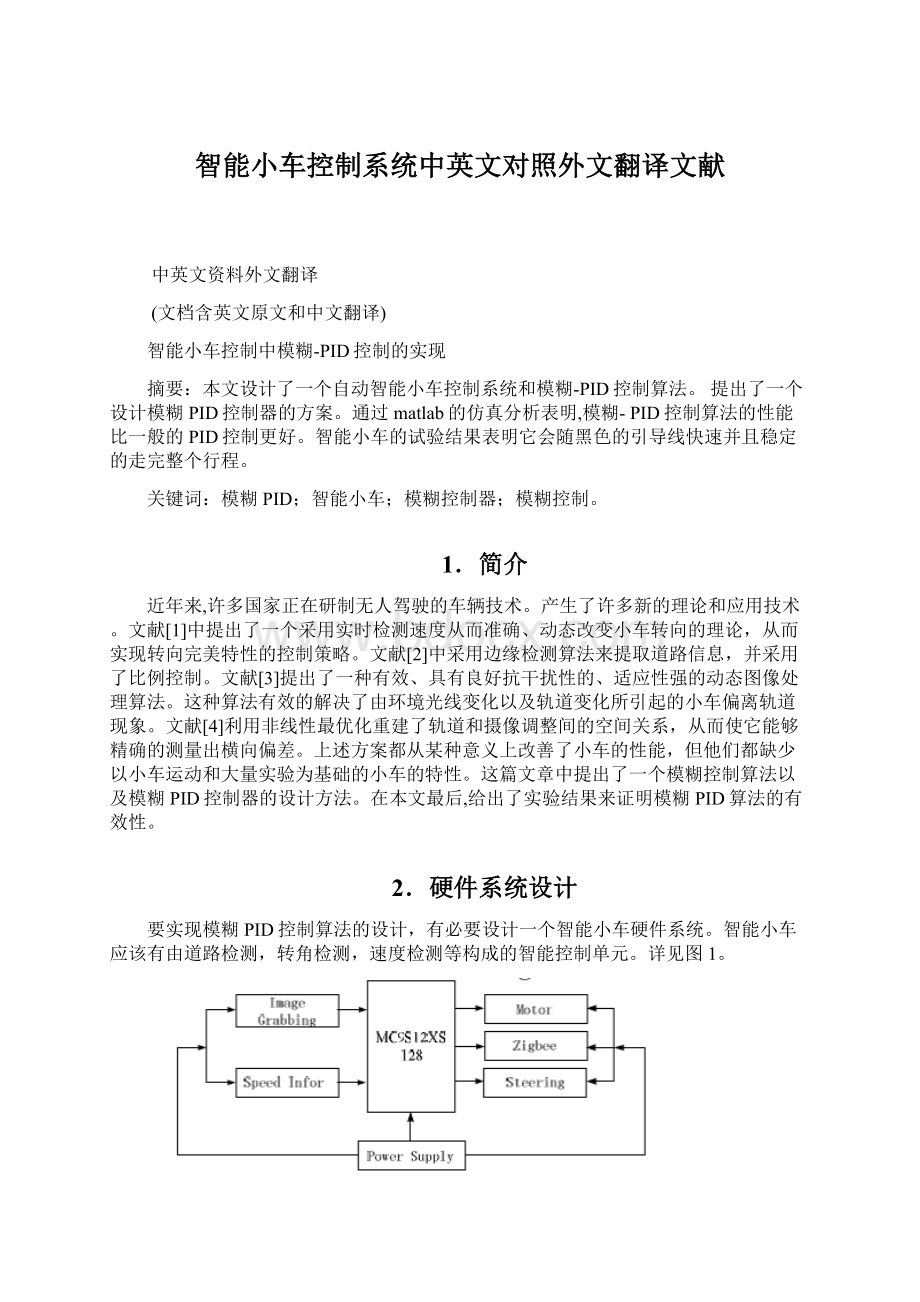
智能小车应该有由道路检测,转角检测,速度检测等构成的智能控制单元。
详见图1。
图1智能小车原理框图
3.模糊PID控制的基本原则
用一般的PID控制算法来获得最好的响应是不容易的。
因为参数Kp、Ki、Kd不适应于不同的对象,或者同一个对象的不同状态。
模糊控制是以模糊集合和模糊逻辑为机车的。
不需要精确的数学模型,它可以由用经验建立起来的规则表来确定控制变量的大小。
一般来说,模糊控制的输入变量基于系统的误差E和系统的误差变化量Ec。
这和比例-微分控制相似。
这样的控制可能可以获得较好的动态性能,但获得的静态性能不能让人满意。
将模糊控制于PID控制结合起来,这就会使系统即具有模糊控制所具有的灵活的适应特性,又具有PID控制的所具有的较高的精确度。
图2给出了模糊PID控制系统的结构图,其中模糊控制器的作用是选择不同的PID参数来改善局部响应,进而改善整体的响应。
图2模糊PID控制仿真框图
4.模糊PID控制器的设计
速度驱动电机控制器的设计和下面给出的转向机构控制器设计是相似的。
模糊控制器由模糊化、模糊推理、去模糊化组成,这些都是以知识库为基础的。
控制器输入为误差及误差变化量,输出为参数Kp、Ki、Kd。
假设误差E的模糊集合为{NBNMNSNOPOPSPMPB};
误差变化量Ec、参数Kp、Ki、Kd的模糊集合为{NBNMNSZOPSPMPB}。
他们表示的意义为:
NB=负大、NM=负中、NS=负小、NO=负零、ZO=零、PO=正零、PS=正小、PM=正中、PB=正大。
得到模糊变量E、EC、Kp、Ki、Kd的隶属度函数曲线如图3至图7所示:
图3Kp隶属函数响应曲线
图4Ki隶属函数响应曲线
图5Kd隶属函数响应曲线
图6E隶属函数响应曲线
图7Ec隶属函数响应曲线
在模糊化完成后需要建立规则表,根据规则表的描述,可以总结出56个模糊条件语句,形式例如:
如果(E是PB)并且(Ec是PB)那么(Kp是PB)(Ki是ZO)(Kd是PB)。
详见表1—表3。
最后一个步骤是去模糊化和建立查询表。
在模糊控制中查询表应该嵌入到程序中。
假设输入的值是固定的那么可以在表中查出相应的输出值。
实际上,这可以节省许多计算时间并使控制简化。
表1Kp规则表
表2Ki规则表
表3Kd规则表
5.实验结果分析
图8PID控制响应曲线
图9模糊PID控制响应曲线
实验利用了文献[7]中的转向机构模型,它的仿真回路已经由图2给出。
我们已经用MATLAB仿真出了一般PID控制算法和模糊PID控制算法,获得的响应曲线如图8、图9所示。
实验结果表明,同一般得PID控制相比模糊控制的响应时间要短且没有超调的。
系统的动态性能有了重大的提高。
6.总结和展望
这篇文章给出了一个控制智能小车的设计方案,并且通过实验从实际上很好的验证了这个方案。
无人驾驶智能小车是以计算机技术、模式识别以及智能控制技术的发展为基础的。
许多国家和机构都在做这一方面的研究,但它是一个复杂的系统,它包含了许多方面的技术,所以任何一个技术的发展都是重要的,这可能成为智能车发展的瓶颈。
7.S12XS系列装置概况
7.1介绍
新的S12XS系列16位微控制器是一个具兼容性的S12XE系列的简化版本。
这些系列成员提供了一个简便的途径来开发通用平台的低端到高端化应用。
将软件和硬件的重新设计降到最少。
以通用汽车应用和CAN节点应用为目的,一些典型的应用如:
车身控制器,乘员检测,车门模块,RKE接收器,智能制动器,照明模块和只能接线箱。
S12XS系列保持了S12XE系列的一些特征包括闪存器纠错代码(EEC),一个独立的用来存储代码和数据的数据闪存模块,提高电磁兼容性能的调频锁定环和一个快速ATD转换器。
S12XS系列在保持了16位微处理器的所有优点和效率的同时保持了低成本低能耗、电磁兼容性和代码长度优势被目前飞思卡尔16位S12和S12X微处理器系列的使用者所喜爱。
同S12X的成员一样S12XS系列运行16为存取,外设和记忆元件无需等待状态。
S12XS可以选择112引脚薄型四侧封装,80引脚四列封装,64引脚薄型四侧封装进行封装并保持和S12XS系列一样的高引脚兼容性。
除了每个模块可用的I/0端口,多达18个I/O端口具有中断能力允许从停止或等待状态被唤醒。
外部设备包括:
MSCAN(可扩展控制器区域网络),SPI(串行外设接口),2个SCI,8通道24位周期中断时钟,8通道16位定时器,8通道PWM和12通道16位ATD转换器。
软件控制的外设-端口路由选择使得以更少的引脚线数封装来灵活混杂的使用外设模块成为可能。
7.1.1特性
S12XS系列的特征都在这里列出,表一列出了内存选项的特征,表二列出了外设特征,这个外设特征在其他系列中也是适用的。
16位cpu12X
向上兼容S12指令系统,但是除了已经被移除的五个模糊指令(MEM,WAV,WAVR,REV,REVW)
加强了变址寻址
获得大量的数据段而不依赖ppage
中断模块
七个层次嵌套的中断
灵活的分配中断源到每一个中断水平
外部非可屏蔽高优先级中断
下一个输入可以做为唤醒中断
中断请求和非可屏蔽中断请求
总线接收引脚
SCI接受引脚
模块映射控制(MMP)
调试模块(DBG)
64×
64位圆形缓冲区采集流量变化信息或内存访问信息
后台调试模块(BDM)
OSC_LCP(oscillator)振荡器
低功率回路控制皮尔斯振荡器利用4MHZD到16MHz晶振
良好的抗干扰度
CRG时钟及复位发生器
COP看门狗
实施中断
在自同步模式下快速从停止装态被唤醒
内存选项
64K,128K和256K字节闪存
闪存的一般特点
64个数据位和8个校验位允许一个校正位和两个检错位
擦除扇形区1024位
自动化程序和消除算法
保护体制防止意外的擦除和程序
保护选项防止越权存取
4K和8K字节数据存储空间
16通道12位模数转换器
8/10/12位分辨率
数据结果向左或向右对齐
为在停止模式下转换的内部振荡器
连续转换模式
16位模拟输入通道多路转换器
多通道SCANCS
引脚可以用来做数字量输入或输出
MSCAN(可扩展控制器区域网络)
1Mb每秒,CAN2.0A、B软件兼容模块
标准和扩充的数据帧
0-8字节数据长度
可编程使位速率至1Mbps
5个先入先出存储接收缓冲区
3个带有内部优先权的传输缓冲区
单纯接听模式来监测CAN总线
通过软件或自动恢复总线关闭
传输或发送信息16位时间标示
TIM(标准时钟模块)
输入捕捉或输出比较8×
16位通道
具有8位精度预分频器的16位自振荡计数器
1×
16位脉冲存储器
PIT(周期性中断定时器)
升级至4个有超时期的定时器
超时期在1—224个总线时钟周期中选择
升级至8通道*8位或4通道*16位脉宽调制器
中间对齐或左对齐的输出
大范围频率的可编程时钟选择逻辑
串行外围接口模块(SPI)
可配置8位或16位字长
传输和接收双重缓冲
主导或从属模式
最高位有效或最低位有效移动
串行时钟相位和极性的选择
2个串行通信接口
全双工或单线运行
13位波特率选择
可编程的字符长度
可编程的传输和接收极性
中断检测和传输碰撞检测
片上稳压器
2个带基准源的并行线性稳压器
带低压中断的低压检测
通电复位(POR)电路
低压重置(LVR)
输入/输出
多达91个一般用途的输入输出引脚
所有输出引脚驱动强调可配置
封装方式的选择
112引脚薄型四侧扁平封装
80引脚四列扁平封装
64引脚薄型四侧扁平封装
操作条件
大范围单电源供电电压,从3.135V至5.5V
最大40MHZCPU总线频率
环境温度从-40℃至125℃
温度选择:
-40℃至85℃
-40℃至105℃
-40℃至125℃
8.HCS12特点
与MC68HC12是一样的并且以MC68HC11CPU为基础
提供高效的内存访问
提供满足程序需求的内存
扩展了HC11指令系统
增加了一些新的寻址方式
允许外部辅助存储器
下面是HCS12CPU体系结构的概述,HCS12CPU与MC68HC12相似并且在许多文献中被称为CPU12,另一方面CPU12向上与MC68HC11CPU兼容。
MC68HC11和MC68HC12分别被称为HC11和HC12。
同HC12一样HCS12CPU将所有暂存器和外设编址到一个独立的线性地址空间,提供高效的存储访问。
由于HCS12系列可寻址1Mb地址空间,分页表被用来访问64-16K地址。
这就为系统设计者提供了满足许多应用程序需要的内存空间。
HCS12CPU指令系统扩充了HC11的数据传送,数据操作指令,增强了算数运算,增加了分支和控制逻辑。
此外,HCS12模块还增加了寻址方式,成为了17种寻址方式。
尽管许多HCS12系列成员含有对于采用单一整合式驱动电路的程序来说是理想的片上闪存和随机存取存储器,用户还是可以安装装置访问外部存储器。
还有更多特点:
HCS12具有和M68HC11/M68HC12相同的程序模型
没有新的寄存器
没有改变中断保存顺序
多路复用和非多路复用的外部中断
HCS12可以重新使用已存在的软件代码资源
注意:
定时回路的改变时因为有了新的时钟频率、字节计数和指令周期时间
HCS12在用新的指令时体现更好的性能
HCS12减少了中断等待时间
HCS12提高了运算速度
HCS12提高了性能
指令队列数据提高了性能
在保证准确性的前提下指令执行速度变快了
参考文献
[1]魏玉虎、石陈钰,姜健照张华。
基于视觉的智能小车转向控制研究[J].应用电子技术,2001
(1)。
[2]李正建,黄丽佳、葛鹏飞,刘翔飞。
基于CCD的智能小车自动跟踪系统[J].东华大学学报(自然科学).2008(6)。
[3],张云周,吴成东,施恩一,秦照冰基于CCD的智能小车导航系统[J].东北大学学报(自然科学).2009
(2)。
[4]李旭章。
基于视觉研究的智能小车横向偏差测量方法[J].东南大学杂志(自然科学版),2007年
(1)。
[5]王朋。
钢筋混凝土机器人的有趣的控制及应用[J].山东大学.2007。
[6]王磊,王为民。
模糊控制理论和应用。
国防工业出版社。
1997:
19
[7]魏新。
机电驱动控制系统的设计和分析南京理工大学2007
英文原文:
ImplementationofFuzzy-PIDinSmartCarControl
Abstract—Anunmanuedsmartcarcontrolsystemandthefuzzy-PIDcontrolalgorithmareproduced.Adesignschemeoffuzzy-PIDcontrollerisputforward.Thesimulationanalysisfrommatlabindicatedthatthedynamicperformanceoffuzzy-PIDcontrolalgorithmisbetterthanthatofusualPID.Experimentalresultofsmartcarshowthatitcanfollowtheblackguidelinewellandfast-stablecompleterunningthewholetrip.
Keywords—fuzzy-PID;
smartcar;
fuzzycontroller;
fuzzycontrol
1Introduction
Inrecentyears,manycountriesaredevelopingunmannedvehicletechnology.Thisgivesbirthtomanynewtheoriesandappliedtechnology.Reference[1]presentsthetheoryofturnaheadwhichusesreal-timemonitoringspeedtochangetheturn-inpointdynamically,thenitimplementsthecontrolstrategytoachieveaperfectcharacteristicsofsteering.Reference[2]usesedgedetectionalgorithmtoextracttrackinformationandadoptPcontrol.Reference[3]proposesaefficient,goodanti-jammingandadaptiveimageprocessingdynamicalgorithmwhicheffectivelysolvestheoutoftrackcausedbythechangesofambientlightandtrack.Reference[4]reconstructsspatialrelationshipsoftrackandcalibratescamerausingnonlinearoptimization,thenitcanmeasurelateraldeviationaccurately.Theaboveimprovevehicleperformanceinonewaybuttheyarealllackofcharacteristicsofcarmovementandbasedonlotsofexperiments.Afuzzy-PIDcontrolalgorithmandadesignschemeoffuzzy-PIDcontrollerareputforwardinthispaper.Atlast,theexperimentalresultisgivenouttoprovethevalidityoffuzzy-PID.
2Hardwaresystemdesign
Toimplementthedesignoffuzzy-PIDalgorithm,it’snecessarytodesignahardwaresystemofsmartcar.Smartcarwouldhaveasmartcontrolunitewhichcontaindetectionofguideline,steeringanglevalue,speedvalueandsoon.SeedetailsinFig.1.
Fig.1Thefunctionalblockdiagramofsmartcar
3Basicprincipleoffuzzy-PID
It’sdifficultforusualPIDcontrolalgorithmtoachievethebesteffect.Because,theparametersKp,Ki,Kdcan’tadjusttodifferentobjectordifferentstateofthesameobject.Fuzzycontrolisbasedonfuzzysetandfuzzylogic.Withoutprecisemathematicalmodelitcandeterminethesizeofcontrolledvariableaccordingtheruletableorganizedbyexperience.Ingeneral,fuzzycontrolinputvariablesarebasedonsystemerrorEanderrorchangeEC,whichissimilartoPDcontrol.Suchcontrolmighthaveagooddynamiccharacteristic,butthestaticperformanceisnotsatisfactory.
CombiningfuzzycontrolandPIDcontrol,thiswouldmakeasystemhavebothflexibility-adaptablityoffuzzycontrolandhighaccuracyofPIDcontrol.Fig.2showsthestructurediagramoffuzzy-PIDcontrolsystem,inwhichfuzzycontrollerisresponsibleforselectingadifferentPIDparametertoimprovethelocalperformancethusincreasingoverallperformance.
4Designoffuzzy-PIDcontroller
Speeddrivemotorcontrollerdesignissimilartothefollowingexampleforsteeringgearcontrollerdesign.Fuzzycontrollerconsistsoffuzzification,fuzzy-inferenceanddefuzzification,whicharebasedontheknowledgebase.[6]Controllerinputerroranderrorchange,outputtheparametersKp,Ki,Kd.
SupposethefuzzysetforEis{NB,NM,NS,NO,PO,PS,PM,PB};
thefuzzysetforEC、Kp、KiandKdis{NB,NM,NS,ZO,PS,PM,PB}.Thelinguisticmeaningsare:
NB=negativebig,NM=negativemiddle,NS=negativesmall,NO=negativezero,ZO=zero,PO=positivezero,PS=positivesmall,PM=positivemiddle,PB=positivebig.SothemembershipfunctioncurvesoffuzzyvariablesE、EC、Kp、KiandKdareshownintheFig.3-Fig.7:
It’snecessarytoestablishruletableafterfinishingfuzzification.Accordingthedescriptionofruletable,56fuzzyconditionalstatementscanbesummed,whichlooklikeIf(EisPB)and(ECisPB)then(KpisPB)(KiisZO)(KdisPB).SeedetailsinTab.1-Tab.3.
Then,thelaststepisdefuzzificationandmakingalookuptable.Duringfuzzycontrol,thelookuptablewouldbeembedintotheprogram.Supposeinputvalueisfixed,thecorrespondingoutputvaluewouldbefoundinthetable.Actually,thiswouldsavemuchcomputingtime,andthecontrolwouldbecomesimply.
5Analysisofexperimentalresults
Experimentusedthesteeringgearmodelprovidesbyreference[7].ThesimulationcircuitwereshowninFig.2.TheusualPIDandfuzzyPIDalgorithmwereallsimulinkedintheMatlab.RespondingcurvesobtainedwereshowninFig.8andFig.9.TheexperimentalresultshowthatcomparedwiththeusualPID,therespondingtimeoffuzzy-PIDalgorithmisshorterwithoutoverswing.Thesystemdynamicperformanceisimprovedsignificantly.
6Conclusionandoutlook
Th
 升级会员
升级会员 