第六章 可编程控制器应用举例Word格式文档下载.docx
《第六章 可编程控制器应用举例Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《第六章 可编程控制器应用举例Word格式文档下载.docx(16页珍藏版)》请在冰豆网上搜索。
(3)混合液体搅拌均匀后(设时间为10s),M=OFF,YV3=ON,放出混合液体;
(4)当液体下降到SL2时,SL2从ON变为OFF,再过20s后容器放空,关闭YV3,YV3=OFF,完成一个操作周期;
(5)只要没按停止按钮,则自动进入下一操作周期。
3.停止操作
按一下停止按钮,则在当前混合操作周期结束后,才停止工作,使系统停止处于初始状态。
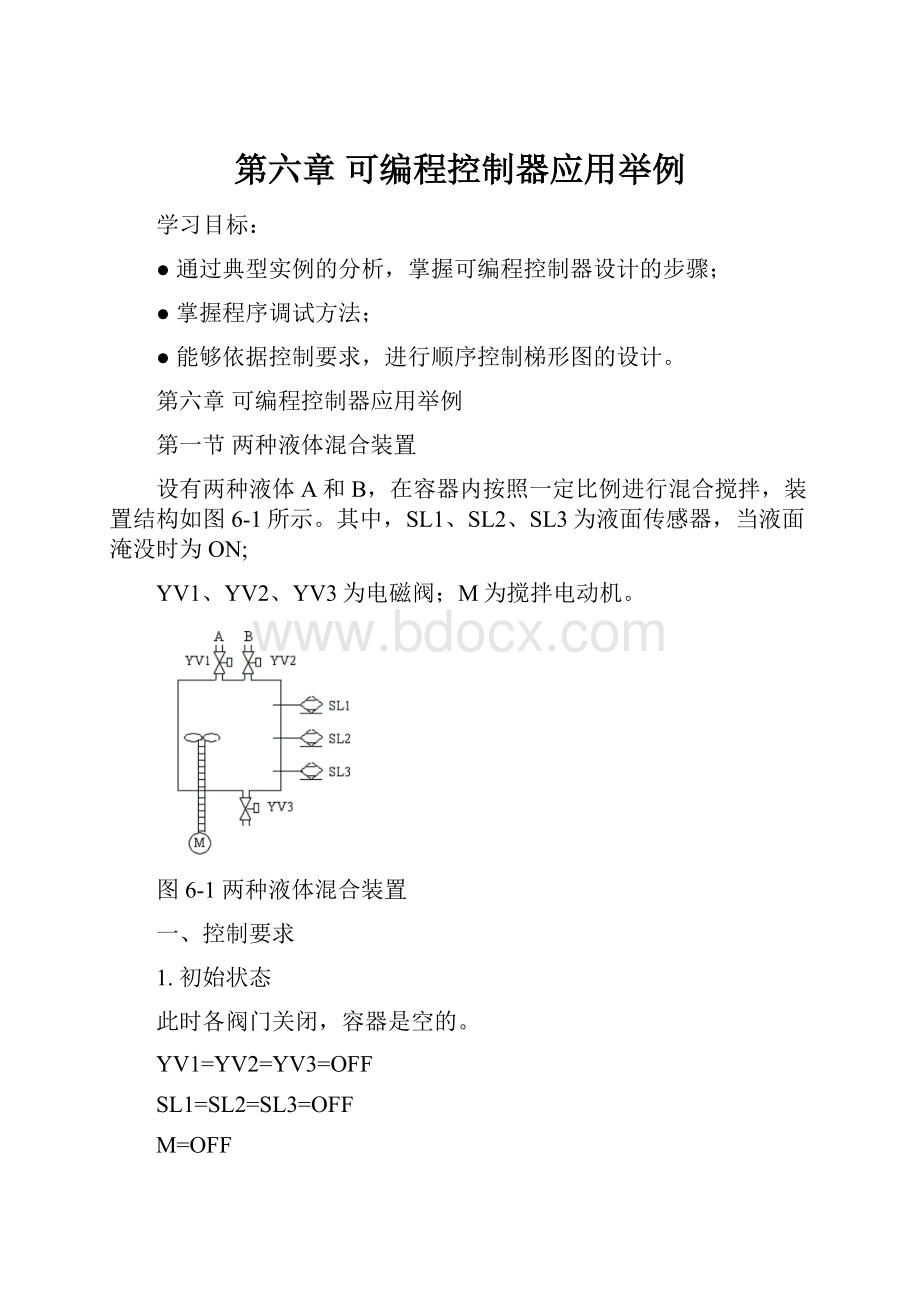
二、I/O通道分配及I/O接线图
1.I/O通道分配
在了解了系统要求和工艺要求和控制要求后,首先要做I/O通道分配,即把已知的输入信号和输出信号分配给PLC的指定I/O端子,具体如表6-1所示。
表6-1I/O通道分配
分类
元件
端子号
作用
输入
SB1
0000
起动按钮
SB2
0001
停止按钮
SL1
0002
液面高位传感器
SL2
0003
液面低位传感器
SL3
0004
液面中位传感器
输出
M
1000
搅拌电动机
YV1
1004
液体A流入电磁阀
YV2
1005
液体B流入电磁阀
YV3
1006
放出混合液体电磁阀
2.PLC的I/O接线图
根据I/O通道分配情况,可画出PLC的I/O接线图,如图6-2所示。
图6-2两种液体混合装置的I/O接线图
三、设计梯形图程序
根据系统的控制要求及I/O通道分配,设计用锁存器控制的梯形图如图6-3所示。
在初始状态,各继电器均为OFF。
1.起动操作
按起动按钮0000,使锁存器21115置为ON,21115使1110ON一个扫描周期,使锁存器21004置位,断开电磁阀YV1,使液体A流入容器。
2.当液位上升到SL3时
当液位上升到SL3时,0004由OFF变为ON,21104ON一个扫描周期,使1004复位,关闭电磁阀YV1。
同时使1005置位,打开电磁阀YV2,使液体B流入容器。
3.当液面上升到SL1时
当液面上升到SL1时,0002由OFF变为ON,21102ON一个扫描周期,使1005复位,关闭电磁阀YV2,同时使1005置位,起动搅拌电动机M。
此时启动定时器TIM00,10s后TIM00动作,使1000复位。
4.搅拌均匀后放出混合液体
在1000的下降沿通过后沿微分指令DIFD使1006置位,断开电磁阀YV3,开始放出混合液体。
5.当液位下降到SL2时
当液位下降到SL2时,0003由ON变OFF,在下降沿使21103ON一个扫描周期,置位21114,启动定时器TIM01,20s后使1006复位,关闭电磁阀YV3,此时容器已放空。
6.自动循环工作
若未按停止按钮0001,则在TIM01的计时时间到时,使1004置位,自动进入下一操作周期。
7.停止操作
当按下停止按钮时,0001为ON,将锁存器21115复位,不能时电磁阀YV1断开,系统执行完本周期的操作,停留在初始状态。
图6-3两种液体混合装置PLC控制梯形图
第二节大电动机的Y—Δ起动控制
Y—Δ起动是笼型电动机的降压起动方式之一,将电动机定子绕组接成Y形起动,起动电流是用Δ形接法直接起动的三分之一,达到规定的速度后,再将电动机的定子绕组切换成Δ形运行。
这种减少起动电流的起动方法,适合于容量大、起动时间长的大电动机起动,或者在受到电源容量限制,为避免起动时过大的起动电流造成电源电压下降过大时使用。
Y—Δ起动控制时的时序图如图6-7(b)所示,当主接触器KM1与Y接法接触器KM2同时接通时,电机工作在Y形起动状态;
而当主接触器KM1与Δ形接法接触器KM3同时接通时,电机就工作在Δ形接法的正常运行状态。
图6-7Y—Δ起动控制时的时序图
由于PLC内部切换时间很短,必须有放火花的内部锁定。
TA为内部锁定时间。
当电机绕组从Y形切换到Δ形接法时,从KM2完全截止到KM3接通这段时间即为TA,其值过长多短都不好,应通过实验确定。
从KM3接通到KM1接通这段时间为TM,TM一般小于TA。
Y形起动时间为TS。
第三节机械手的步进控制
在自动化生产线上,经常机械手完成工作的取放操作,图6—13是以机械手的结构示意图,其任务是将传送带A上的物品搬送至传送带B。
一、机械手工作过程
机械手工作过程示意如下:
原位→下降→抓紧→上升→右移
↓
左移←上升←放松←下降
机械手的每次循环动作均从原位开始。
二、控制要求
1、在传输带A端部,安装了光电开关PS,用以检测物品的到来。
当光电开关检测到物品时为ON状态。
2、机械手在原位时,按下启动按钮,系统启动,传送带A运转。
当光电开关检测到物品后,传送带A停。
3、传输带A停止后,机械手进行一次循环动作,把物品从传送带A上搬到传送带B(连续运转)上。
4、机械手返回原位后,自动启动传送带A运转,进行下一个循环。
5、按下停止按钮后,待整个循环完成后,机械手返回原位,才能停止工作。
6、机械手的上升/下降和左移/右移的执行结构均采用双线圈的二位电磁阀驱动液压装置实现,每个线圈完成一个动作。
7、抓紧/放松由单线圈二位电磁阀驱动液压装置完成,线圈得电时执行抓紧动作,线圈断电时执行放松动作。
8、机械手的上升、下降、左移、右移动作均由限位开关控制。
9、抓紧动作由压力继电器控制,当抓紧时,压力继电器动合触点闭合。
放松动作作为时间控制(设为2S)。
表6-6机械手步进控制的I/O通道分配
类别
元件
端子号
作用
输
入
SQ1
上升极限开关
SQ2
下降极限开关
SQ3
右移极限开关
SQ4
0005
左移极限开关
KA
0006
抓紧压力继电器触点
PS
0007
光电开关
出
KM1
传输带A驱动
KM2
1001
右移电磁阀
KM3
1002
左移电磁阀
KM4
1003
抓紧/放松电磁阀
KM5
上升电磁阀
KM6
下降电磁阀
四、梯形图程序设计
根据机械手的工作过程,我们可以将其工作过程分解为九个步骤,这是典型的具有步进性质的顺序控制,因此就可以用移位寄存器来设计机械手的控制程序。
用位移寄存器设计具有步进性质的顺序控制,其核心是设计移位脉冲输入。
这里我们介绍用画状态流程图的方法设计梯形图程序。
状态流程图的画法如下:
1、首先将整个工作过程分解为若干个独立的控制功能步,简称步(本例中机械手的工作过程就可以分解成九个独立的步),它是为完成相应的控制功能而设计的独立的控制程序段。
2、每个独立的步分别用一个方框表示,然后根据动作顺序将各个步用箭头连接起来。
3、在相邻的两个步之间画上一条短横线,表示状态转换条件。
当转换条件满足时,上一步被封锁,下一步被激活,转向执行新的控制程序,若不满足转换条件,则继续执行上一步的控制程序。
4、在每个步的右侧,画上要被执行的控制程序。
图6-16用移位寄存器设计的机械手的梯形图
第四节全自动洗衣机的自动控制
全自动洗衣机的洗衣桶(外桶)和脱水桶(内桶)是以同一中心安放的。
外桶固定,作盛水用;
内桶可以旋转,做脱水(甩水)用。
内桶的周围有很多小孔,使内桶和外桶的水流相同。
洗衣机的金水和排水分别由进水电磁阀和排水电磁阀来执行。
进水时,通过控制系统将进水电磁阀打开,经进水管将水注入到外桶。
排水时,通过控制系统将排水电磁阀打开,将水由外桶排到及外。
洗涤正转、反转由洗涤电机驱动波盘的正、反转来实现,此时脱水桶并不旋转。
脱水时,控制系统将离合器合上,有洗涤电机带动内桶正转进行甩干。
高、低水位控制开关分别用来检测高、低水位。
启动按钮用来启动洗衣机工作,停止按钮用来实现手动停止进水、排水、脱水及报警。
排水按钮用来实现手动排水。
其示意图如图6-20所示。
一、控制要求
该全自动洗衣机的控制要求可以用图6-21所示的流程图来表示。
按下启动按钮后,洗衣机开始进水。
水满时(即水位到达高水位,高水位开关由OFF变ON),PLC停止进水,并开始洗涤正转,正转洗涤15s后暂停,暂停3s后开始洗涤反转。
反洗15s后暂停。
暂停3s后,若正、反洗涤未满3次,则返回从正开始的动作;
若正、反满3次时,则开始排水。
水位下降到低水位时(低水位开关由ON变OFF)开始脱水并继续排水。
脱水10s即完成一次从进水到脱水的大循环过程。
若未完成3次大循环,则返回从进水开始的全部动作,进行下一次大循环;
若完成了3次大循环,则进行洗完报警。
报警10s后结束全部过程,自动停机。
此外,还要求可以按排水按钮以实现手动排水;
按停止按钮以实现手动停止进水、排水、脱水及报警。
图6-21全自动洗衣机流程图
表6-8洗衣机的I/O通道分配
SB3
排水按钮
高水位开关
低水位开关
进水电磁阀
电动机正转接触器
电动机反转接触器
排水电磁阀
脱水电磁离合器
报警蜂鸣器
表6-9洗衣机的定时器/计数器通道分配
器件号
设定值
定
时
器
TIM00
15s
正转洗涤计时
TIM01
3s
正洗暂时计时
TIM02
反转洗涤计时
TIM03
反洗暂时计时
TIM04
10s
脱水计时
TIM05
洗完报警计时
计数器
CNT06
3次
正、反洗循环计数
CNT07
脱水(大循环)计数
图6-22全自动洗衣机的I/O接线图
图6-23全自动洗衣机用基本逻辑指令编程的梯形图
小结:
本章通过对PLC控制的典型实例的学习,进一步明确其设计步骤,而且在PLC设计过程中:
1、最大程度地满足设计要求,各系统安全可靠。
2、PLC软件设计与硬件设计相结合,要确定用户的输入、输出设备,分配I/O通道,绘制I/O接线图。
3、程序设计完成,要进行模拟调试。
4、最终程序的成功要通过系统调试,并保证可靠性。
 升级会员
升级会员 