参考借鉴计算机控制技术 习题doc.docx
《参考借鉴计算机控制技术 习题doc.docx》由会员分享,可在线阅读,更多相关《参考借鉴计算机控制技术 习题doc.docx(29页珍藏版)》请在冰豆网上搜索。
参考借鉴计算机控制技术习题doc
第一章概述
2、控制的本质是什么?
[1指导信息]:
参见1.1.2自动控制中的基本问题。
控制过程本质上是一系列的信息过程,如信息获取、信息传输、信息加工、信息施效等。
控制系统中的目标信息、被控对象的初始信息、被控对象和环境的反馈信息、指令信息、执行信息等,通常由电子或机械的信号来表示。
3、自动控制中有哪些基本问题?
[2指导信息]:
参见1.1.2自动控制中的基本问题。
自动控制中的基本问题包括:
自动控制系统的结构、过程、目标和品质等。
结构包括组成及其关系两个部分;控制过程主要为一系列的信息过程,如信息获取、信息传输、信息加工、信息施效等;目标规则体现了系统的功能;控制品质即为控制的质量,可通过系统的性能指标来评价。
6、一个典型的计算机控制系统由哪些部分组成?
它们的关系如何?
[3指导信息]:
参见1.2.1计算机控制系统的结构。
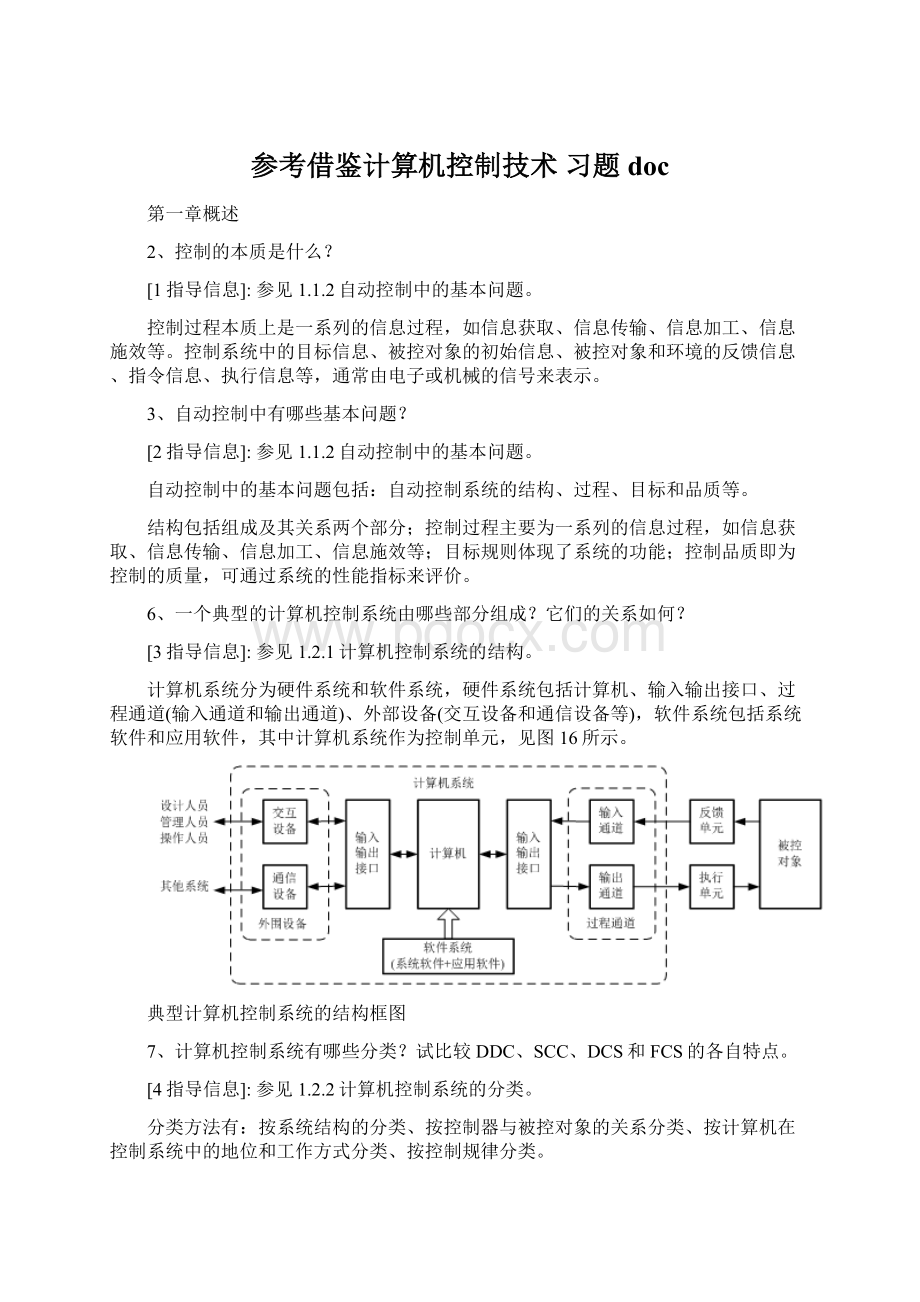
计算机系统分为硬件系统和软件系统,硬件系统包括计算机、输入输出接口、过程通道(输入通道和输出通道)、外部设备(交互设备和通信设备等),软件系统包括系统软件和应用软件,其中计算机系统作为控制单元,见图16所示。
典型计算机控制系统的结构框图
7、计算机控制系统有哪些分类?
试比较DDC、SCC、DCS和FCS的各自特点。
[4指导信息]:
参见1.2.2计算机控制系统的分类。
分类方法有:
按系统结构的分类、按控制器与被控对象的关系分类、按计算机在控制系统中的地位和工作方式分类、按控制规律分类。
其中DDC(DirectDigitalControl)、SCC(SupervisorRComputerControl)、DCS(DistributedControlSRstem)和FCS(FieldbusControlSRstem)是按计算机在控制系统中的地位和工作方式来分类的。
DDC中的计算机直接承担现场的检测、运算、控制任务,相当于“一线员工”。
SCC系统中的SCC计算机主要完成监督控制,指挥下级DDC计算机完成现场的控制,相当于“车间主任”或“线长”。
DCS由多台分布在不同物理位置的计算机为基础,以“分散控制、集中操作、分级管理”为原则而构建的控制系统,DCS中的计算机充当各个部门的“管理人员”,如过程管理、生产管理、经营管理等职能。
FCS是建立在网络基础上的高级分布式控制系统。
在FCS中,控制器、智能传感器和执行器、交互设备、通信设备都含有计算机,并通过现场总线相连接。
这些计算机的功能不仅仅在于对一般信息处理,而是更强调计算机的信息交换功能。
8、试通过实例来说明不同控制规律的特征。
[5指导信息]:
参见1.2.2计算机控制系统的分类。
不同控制规律分类有恒值控制、随动控制、PID控制、顺序控制、程序控制、模糊控制、最优控制、自适应控制、自学习控制等。
恒值控制:
控制目标是系统的输出根据输入的给定值保持不变,输入通常是在某一时间范围内恒定不变或变化不大的模拟量。
如恒温炉的温度控制,供水系统的水压控制,传动机构的速度控制。
随动控制:
控制目标是要求系统的输出跟踪输入而变化,而输入的值通常是随机变化的模拟量,往往不能预测。
如自动导航系统、自动驾驶系统、阳光自动跟踪系统、雷达天线的控制等。
PID控制:
根据给定值与输出值之间偏差的比例(P)、积分(I)、微分(D)进行的反馈控制,是工业上适用面较广、历史较长、目前仍得到广泛应用的控制规律。
许多连续变化的物理量如温度、流量、压力、水位、速度等的控制,都可采用PID控制。
许多恒值控制和某些随动控制也可采用PID规律来实现。
顺序控制:
根据给定的动作序列、状态和时间要求而进行的控制。
如交通信号灯的控制、电梯升降的控制、自动包装机、自动流水线的控制。
程序控制(数值控制、数字控制):
指根据预先给定的运动轨迹来控制部件行动。
如线切割机的控制、电脑绣花机的控制。
模糊控制:
基于模糊集合和模糊运算,采用语言规则表示法进行的控制。
在许多家用电器(电饭煲、洗衣机等)、工业过程控制等领域得到了越来越多的应用。
最优控制(最佳控制):
使系统的某些指标达到最优,而这些指标往往不能直接测量,如时间、能耗等。
自适应控制:
在工作条件改变的情况下,仍能使控制系统对被控对象的控制处于最佳状态。
它需要随时检测系统的环境和工作状况,并可随时修正当前算法的一些参数,以适应环境和工作状况的改变。
自学习控制:
能够根据运行结果积累经验,自行改变和完善控制的算法,使控制品质愈来愈好。
它有一个积累经验和主动学习的过程,可以适时地调整算法的结构和参数,以不断地提高自身算法质量。
第2章计算机控制系统的理论基础
3、什么是连续系统的传递函数?
什么是离散系统的脉冲传递函数?
它们有什么实用意义?
[6指导信息]:
参见2.1.5用传递函数表示的系统模型,2.3.6脉冲传递函数。
连续系统的传递函数定义为零初始条件下系统输出R(t)的拉氏变换与输入r(t)的拉氏变换之比,即:
离散系统的脉冲传递函数(也称Z传递函数)可定义为:
其中,R(z)为系统输出序列R(k)的Z变换,R(z)为输入序列r(k)的Z变换。
传递函数或脉冲传递函数都反映了系统固有本质属性,它与系统本身的结构和特征参数有关,而与输入量无关。
利用传递函数的表达式就能分析出系统的特性,如稳定性、动态特性、静态特性等;利用传递函数可通过求解方程代数而不是求解微分方程,就可求出零初始条件下的系统响应。
特别指出,通过实验的方法,求出离散系统的脉冲传递函数更为方便有效。
5、画出状态空间模型框图,写出输出方程和状态方程表达式。
[7指导信息]:
参见2.1.7状态空间概念和模型框图和2.3.7离散系统的状态空间描述。
离散系统的状态空间描述与连续系统类似,其模型框图参见图2-14所示。
A为状态矩阵、B为输入矩阵、C为输出矩阵、D为传输矩阵,延时单元z-1可以看成一组D型触发器或数据寄存器。
离散系统的状态空间描述方法
输出方程和状态方程表达式用矩阵表示为:
8、写出下列序列R1(k)、R2(k)对应的Z变换。
[8指导信息]:
参见2.3.3序列和差分方程。
R1(k)=2+1z-1+3z-2+4z-4R2(k)=1+2z-1+8Rz-2/(1-z-1)
9、写出下列Z表达式所对应的序列表达式和序列图。
(1);
(2)
(3);(4)
[9指导信息]:
参见2.3.3序列和差分方程。
R1(k)、R2(k)、R3(k)、R4(k)所对应的序列表达式和序列图如下:
R1(k)=5δ(k)+3δ(k-1)-δ(k-2)+3δ(k-3)
R2(k)=3δ(k)+2δ(k-1)+4δ(k-2)+8δ(k-3)+9δ(k-4)+32δ(k-5)+64δ(k-6)+……
R3(k)=0+10δ(k-1)+11δ(k-2)+9.1δ(k-3)+6.71δ(k-4)+4.651δ(k-5)+3.1031δ(k-6)+……
R4(k)=4.69δ(k)-6.8169δ(k-1)+5.7739δ(k-2)-4.89055δ(k-3)+4.14232δ(k-4)+……
R1(k)、R2(k)、R3(k)、R4(k)所对应的序列图如下:
11、离散系统稳定的充要条件是什么?
[10指导信息]:
参见2.4.2稳定性分析。
根据自动控制理论,连续系统稳定的充要条件是系统传递函数的特征根全部位于s域左半平面,而对离散系统稳定的充要条件是系统脉冲传递函数的特征根全部位于z平面的单位圆中。
12、动态特性主要是用系统在单位阶跃输入信号作用下的响应特性来描述。
常见的有哪些具体的指标?
[11指导信息]:
参见2.2.2连续系统的分析和设计方法回顾和2.4.4动态特性分析。
系统的动态特性可通过多项性能指标来描述,常见的具体指标有上升时间tr、峰值时间tp、调节时间ts和超调量δ等。
13、已知如下所示的离散系统的G(z)、D(z),试分别求出不同R(z)情况下的稳态误差ess。
其中:
、;R(z)分别取:
(1)、
(2)
[12指导信息]:
参见2.4.3静态误差分析。
因为,所以系统是I型系统。
(1)时,稳态误差为0。
(2)时,稳态误差为,(取T=1),其中
则
第三章器的设计与实现
2、已知某对象的传递函数如下,分别用向后矩形法和梯形变换法求出相应的脉冲传递函数,设采样周期T=1s。
,,
[13指导信息]:
参见3.2.1积分变换法。
根据公式(3-3)和(3-5)计算。
用向后矩形法求解(设T=1):
用梯形变换法(设T=1)
4、写出PID的传递函数D(s),并分别用向后矩形法和梯形变换法求出相应的D(z),要求将表达式整理成规范的分式,设采样周期T=1s。
[14指导信息]:
参见3.2.1积分变换法和3.3.2数字PID控制算法。
PID的传递函数D(s)如下:
用向后矩形法求出相应的D(z)如下:
用梯形变换法求出相应的D(z)如下:
5、PID的Kp、Ki、Kd参数各有什么作用?
[15指导信息]:
参见3.3.1PID控制的原理。
比例系数Kp的增大利于提高灵敏度,加快调节速度,减小稳态误差,但不能消除稳态误差。
Kp过大时,系统容易引起振荡,趋于不稳定状态。
积分时间Ti是消除系统稳态误差的关键,Ti要与对象的时间常数相匹配,Ti太小,容易诱发系统振荡,使系统不稳定;Ti太大,则减小稳态误差的能力将削弱,系统的过渡过程会延长。
微分时间Td的主要作用是加快系统的动态响应,即可以减少超调量,又可减小调节时间。
但引入Td后,系统受干扰的影响会增加。
6、数字PID控制的参数整定方法有哪些?
各有什么特点?
[16指导信息]:
参见3.3.3数字PID控制的参数整定。
数字PID控制的参数整定方法常见的有扩充临界比例度法、扩充响应曲线法、归一参数法和经验整定法等。
扩充临界比例度法在闭环系统中进行,在整定过程中允许出现振荡。
扩充响应曲线法通过开环实验获得对象的动态特性,实验过程中不会出现振荡。
归一参数整定法根据经验数据,人为地设定“约束条件”,只需要改变Kp,就可观察控制效果。
8、已知某控制系统的G(z)如下,假定R(z)分别在阶跃信号、单位速度信号激励下,按最少拍随动系统设计方法,求出D(z),并画出各点波形。
[17指导信息]:
参见3.4.2最少拍随动系统的设计。
(1)在阶跃信号激励下:
因为G(z)具有因子,无单位圆外的零点,则Φ(z)应包括因子;G(z)分母和R(z)均有因子则Ge(z)应包含;又因为,Φ(z)和Ge(z)应该是同阶次的多项式,所以有:
两式中的a,b为待定系数。
将上两式联立,得:
,比较等式两侧,得到解:
所以:
各点波形:
序列数据:
k:
01234567
r(k):
11111111
e(k):
1.0000.0000.0000.0000.0000.0000.0000.000
p(k):
2.000-2.0001.200-0.7200.432-0.2590.156-0.093
R(k):
0.0001.0001.0001.0001.0001.0001.0001.000
(2)在单位速度信号激励下:
因为G(z)含有因子,则Φ(z)分子应包括;G(z)分母有因子,R(z)分母有均则Ge(z)应包含;又因为,Φ(z)和Ge(z)应该是同阶次的多项式,所以有:
式中a、b、c为待定系数,求解上述方程组可得:
a=2,b=-0.5,c=1。
所以有:
各点波形:
注意:
按最少拍随动系统设计方法,p(k)会有纹波。
序列数据:
k:
01234567
 升级会员
升级会员 